SLAM(Simultaneous Location and Mapping,同时定位与地图构建),它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。
经典视觉SLAM框架

视觉里程计(Visual Odometry,VO)
估算相邻图像间相机的运动,以及局部地图的样子。由于VO只使用相邻2张图片估计相机运动,因此会产生累积漂移,为了解决漂移问题,需要使用后端优化和回环检测技术。VO称为前端,前端给后端提供待优化的数据,以及这些数据的初始值,后端负责整体的优化过程。
后端优化(Optimization)
接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。
回环检测(Loop Closing)
判断机器人是否曾经到达过先前的位置。为了实现回环检测,我们需要让机器人具有识别曾经到达过的场景的能力。可以通过判断图像间的相似性,来完成回环检测。在检测到回环之后,我们会把“A 与 B 是同一个点”这样的信息告诉后端优化算法。然后,后端根据这些新的信息,把轨迹和地图调整到符合回环检测结果的样子。这样,如果我们有充分而且正确的回环检测,就可以消除累积误差,得到全局一致的轨迹和地图。
建图(Mapping)
根据估计的轨迹,建立与任务要求对应的地图。大体上讲,可以分为度量地图和拓扑地图两种。
特殊正交群SO(n) Special Orthogonal Group
![]()
SO(3)就表示三维空间中的旋转。
特殊欧氏群SE(3)

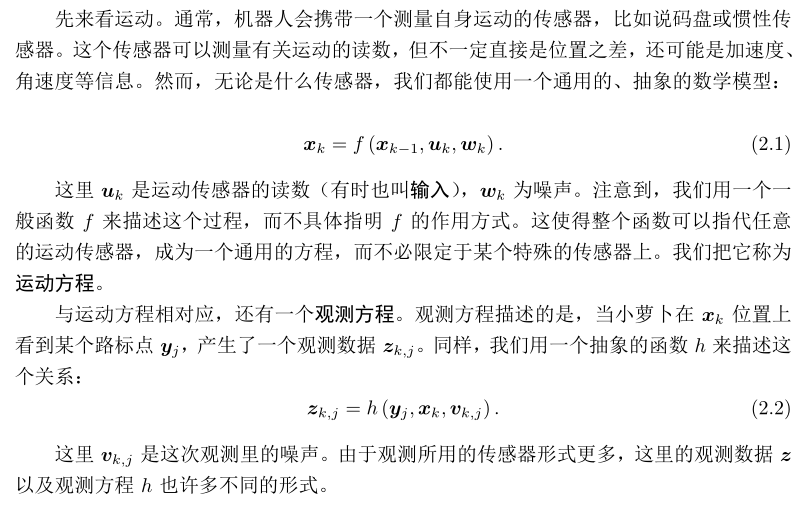
SLAM问题的数学描述
三维旋转的表示

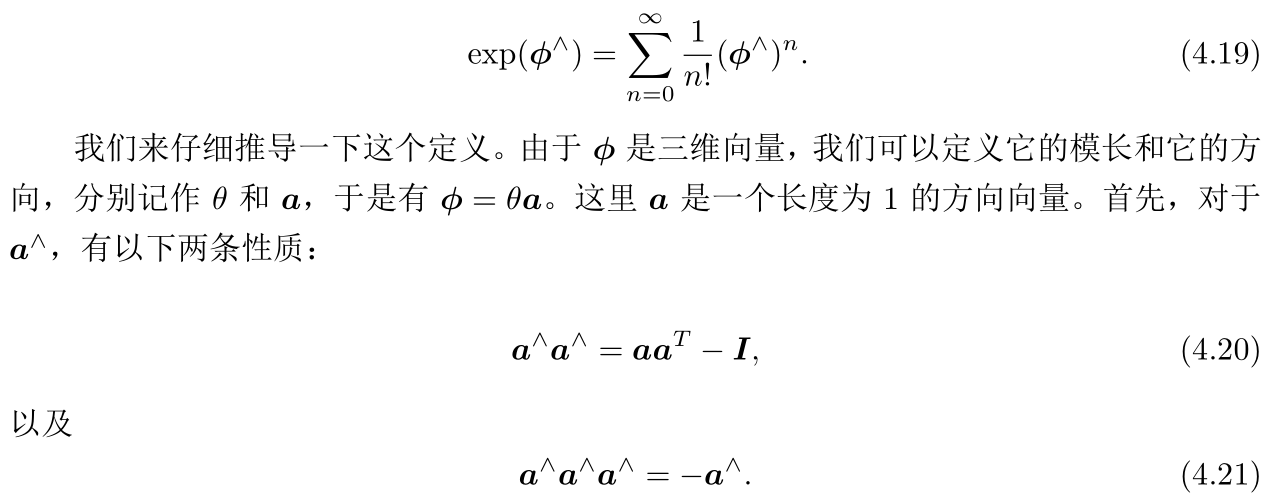
两个向量的外积等于第一个向量的反对称矩阵与第二个向量的乘积。
理论上可以证明,只要我们想用三个实数来表达三维旋转时,都会不可避免地存在奇异性问题。
- 旋转矩阵,用九个量描述三自由度的旋转,具有冗余性。
- 轴角表示,通过罗德里格斯公式(Rodrigues’s Formula )实现和旋转矩阵之间的相互转换。
- 欧拉角,使用三个分离的转角,把一个旋转分解成三次绕不同轴的旋转。当然,由于分解方式有许多种,所以欧拉角也存在着不同的定义方法。比如说,当我先绕 X 轴旋转,再绕 Y 轴,最后绕 Z 轴,就得到了一个 XY Z 轴的旋转。同理,可以定义 ZY Z、ZYX等等旋转方式。如果讨论更细一些,还需要区分每次旋转是绕固定轴旋转的,还是绕旋转之后的轴旋转的,这也会给出不一样的定义方式。存在万向锁(奇异性)问题。
- 四元数,既是紧凑的,也没有奇异性。我们能用单位四元数表示三维空间中任意一个旋转
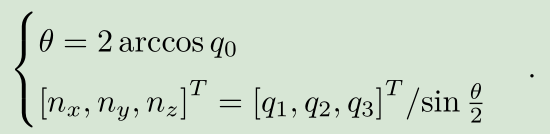
四元数表示<-->轴角表示

旋转矩阵表示-->四元数表示
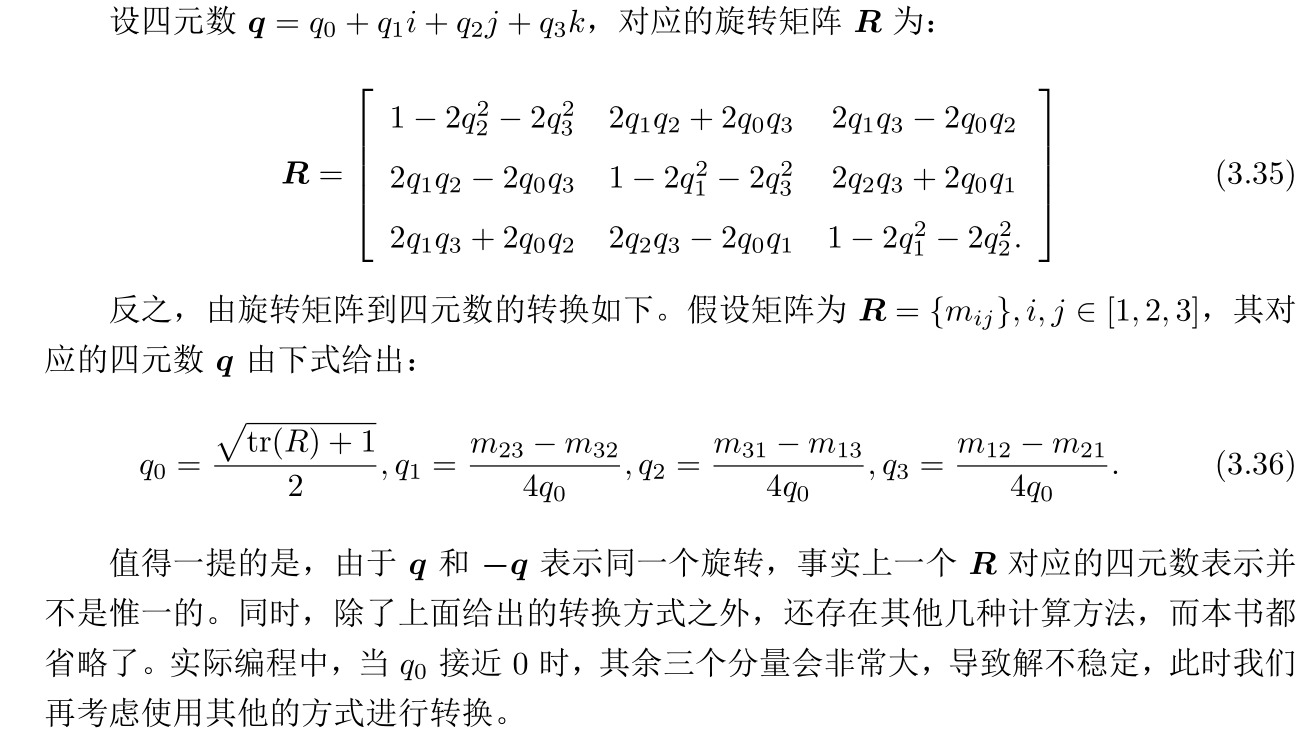
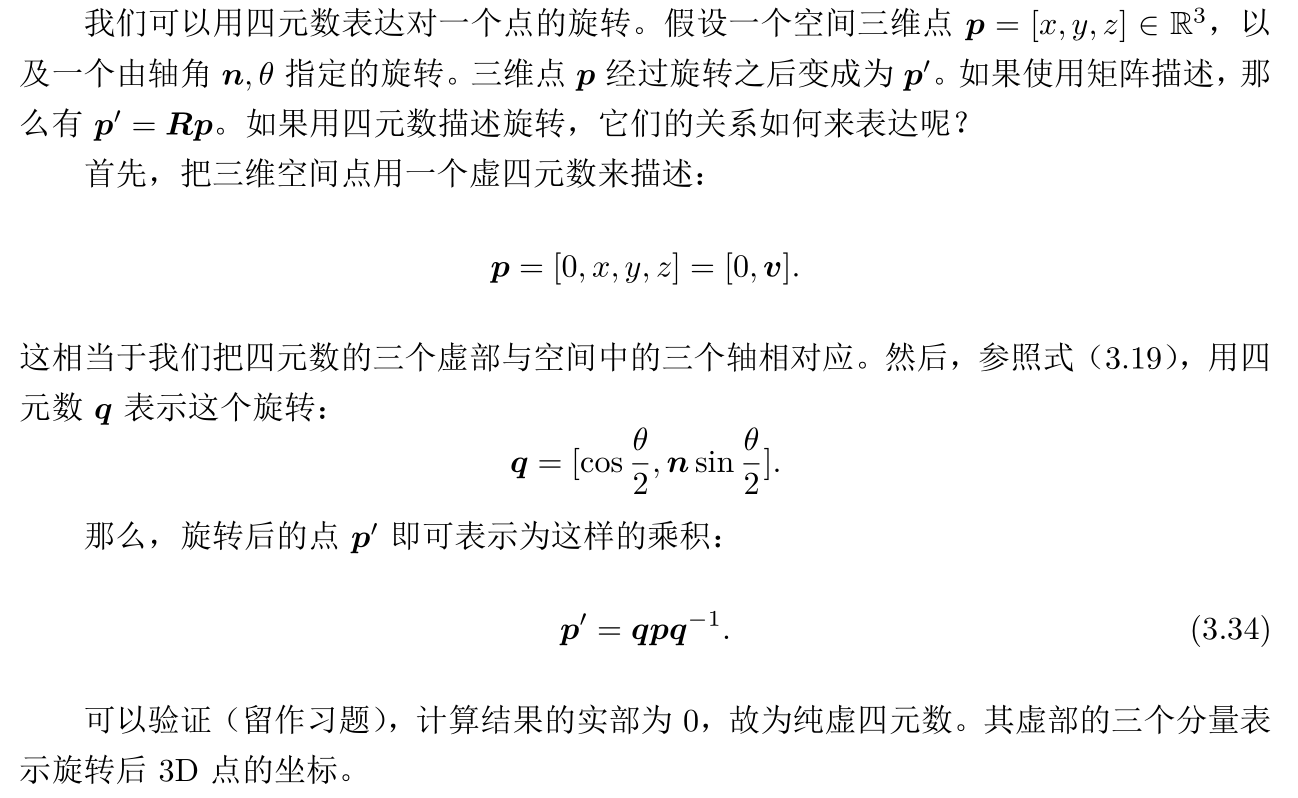
四元数表示旋转


1 #include <iostream> 2 using namespace std; 3 4 #include <Eigen/Core> 5 #include <Eigen/Geometry> 6 #define M_PI 3.14159265358979323846 // pi 7 /**************************** 8 * 本程序演示了 Eigen 几何模块的使用方法 9 ****************************/ 10 11 int main(int argc, char** argv) 12 { 13 // Eigen/Geometry 模块提供了各种旋转和平移的表示 14 // 3D 旋转矩阵直接使用 Matrix3d 或 Matrix3f 15 Eigen::Matrix3d rotation_matrix = Eigen::Matrix3d::Identity(); 16 // 旋转向量使用 AngleAxis, 它底层不直接是Matrix,但运算可以当作矩阵(因为重载了运算符) 17 Eigen::AngleAxisd rotation_vector(M_PI / 4, Eigen::Vector3d(0, 0, 1)); //沿 Z 轴旋转 45 度 18 cout.precision(3); 19 cout << "rotation matrix = " << rotation_vector.matrix() << endl; //用matrix()转换成矩阵 20 // 也可以直接赋值 21 rotation_matrix = rotation_vector.toRotationMatrix(); 22 // 用 AngleAxis 可以进行坐标变换 23 Eigen::Vector3d v(1, 0, 0); 24 Eigen::Vector3d v_rotated = rotation_vector * v; 25 cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl; 26 // 或者用旋转矩阵 27 v_rotated = rotation_matrix * v; 28 cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl; 29 30 // 欧拉角: 可以将旋转矩阵直接转换成欧拉角 31 Eigen::Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX顺序,即roll pitch yaw顺序 32 cout << "yaw pitch roll = " << euler_angles.transpose() << endl; 33 34 // 欧氏变换矩阵使用 Eigen::Isometry 35 Eigen::Isometry3d T = Eigen::Isometry3d::Identity(); // 虽然称为3d,实质上是4*4的矩阵 36 T.rotate(rotation_vector); // 按照rotation_vector进行旋转 37 T.pretranslate(Eigen::Vector3d(1, 3, 4)); // 把平移向量设成(1,3,4) 38 cout << "Transform matrix = " << T.matrix() << endl; 39 40 // 用变换矩阵进行坐标变换 41 Eigen::Vector3d v_transformed = T*v; // 相当于R*v+t 42 cout << "v tranformed = " << v_transformed.transpose() << endl; 43 44 // 对于仿射和射影变换,使用 Eigen::Affine3d 和 Eigen::Projective3d 即可,略 45 46 // 四元数 47 // 可以直接把AngleAxis赋值给四元数,反之亦然 48 Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector); 49 cout << "quaternion = " << q.coeffs() << endl; // 请注意coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部 50 // 也可以把旋转矩阵赋给它 51 q = Eigen::Quaterniond(rotation_matrix); 52 cout << "quaternion = " << q.coeffs() << endl; 53 // 使用四元数旋转一个向量,使用重载的乘法即可 54 v_rotated = q*v; // 注意数学上是qvq^{-1} 55 cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl; 56 57 return 0; 58 }
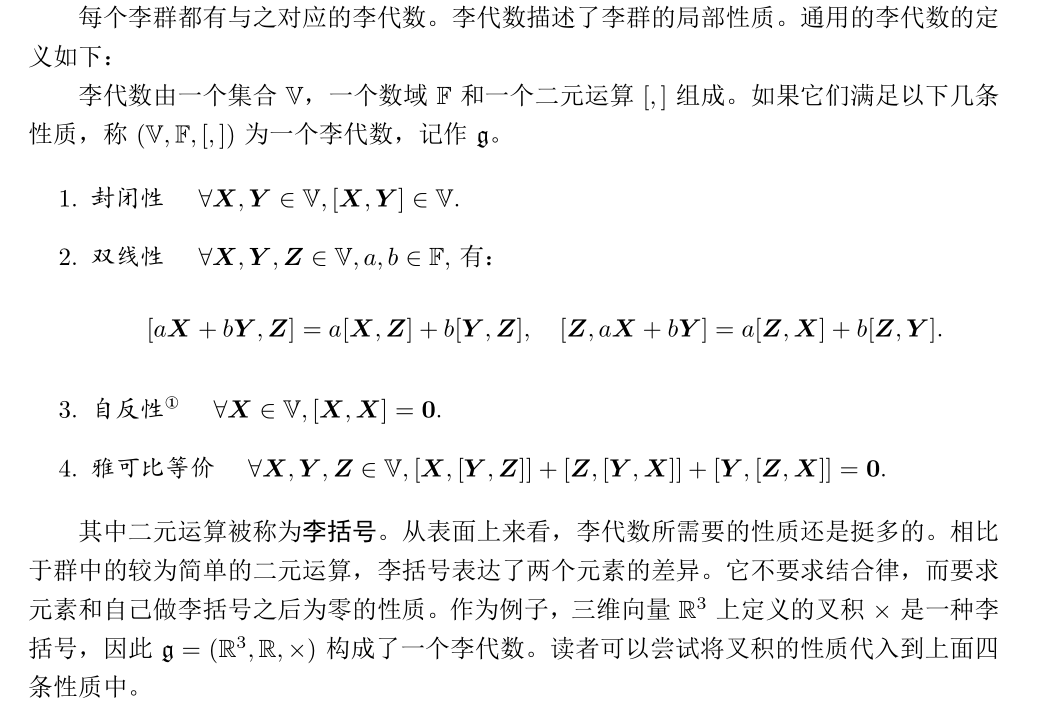
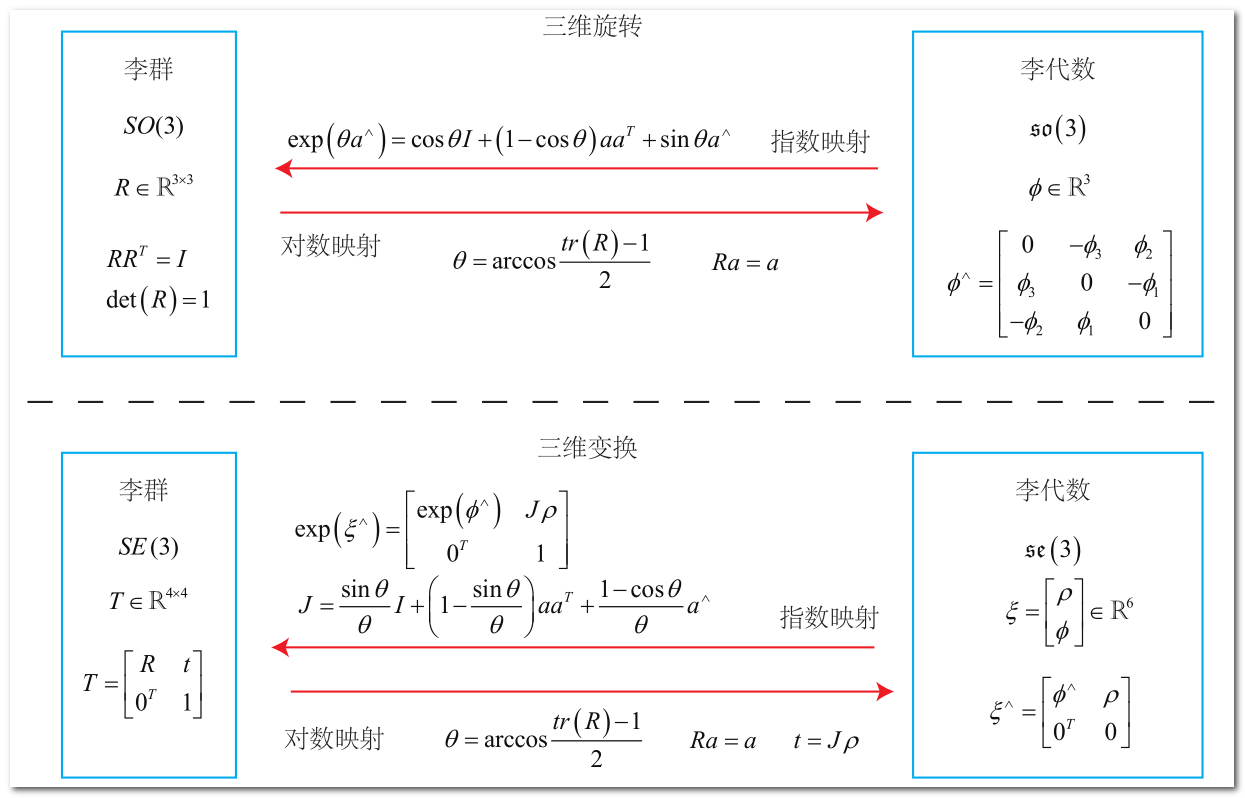
李群李代数
SO(3)和SE(3)对加法不是封闭的,即对两个旋转矩阵相加,则结果不再是一个旋转矩阵。但关于乘法是封闭的。

李群是指具有连续(光滑)性质的群,像整数群Z那样离散的群不是李群。而 SO(n) 和 SE(n),它们在实数空间上是连续的。我们能够直观地想象一个刚体能够连续地在空间中运动,所以它们都是李群。
SO(3)对应的李代数
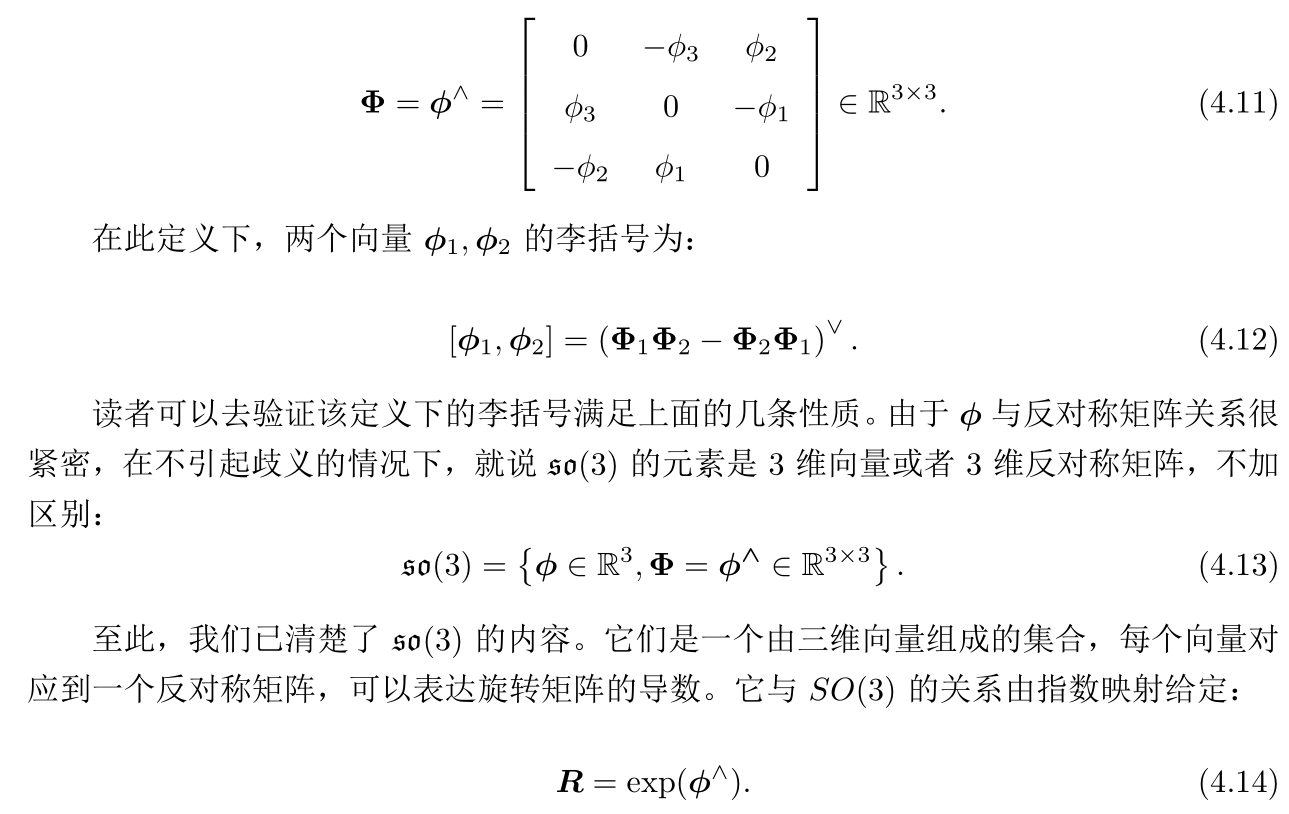
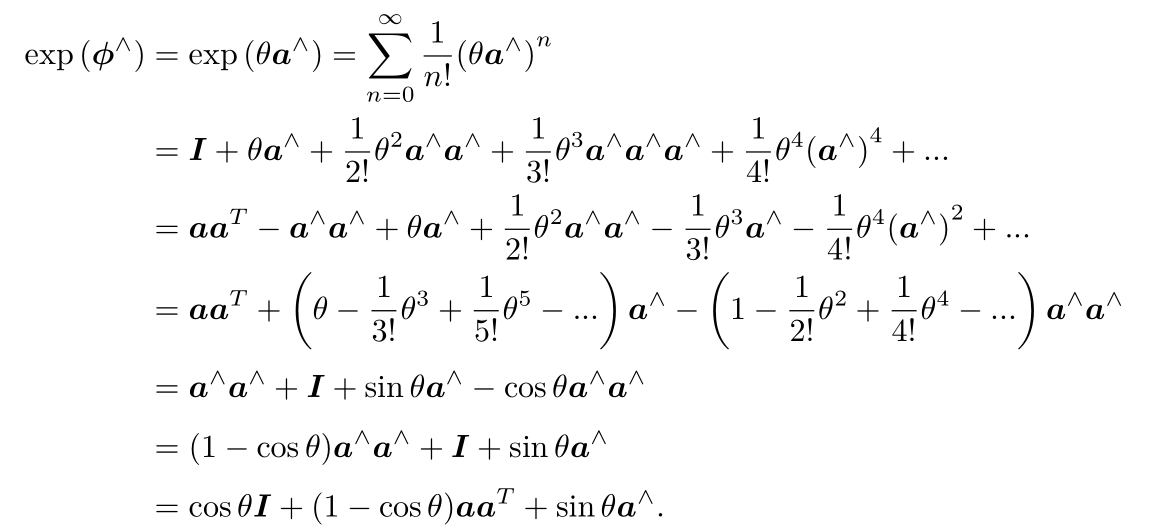
这表明,李代数so(3) 实际上就是由所谓的旋转向量组成的空间,而指数映射即罗德里格斯公式。
SE(3)对应的李代数

![]()
指数映射:


平移部分经过指数映射,发生了一次以J为系数矩阵的线性变换。
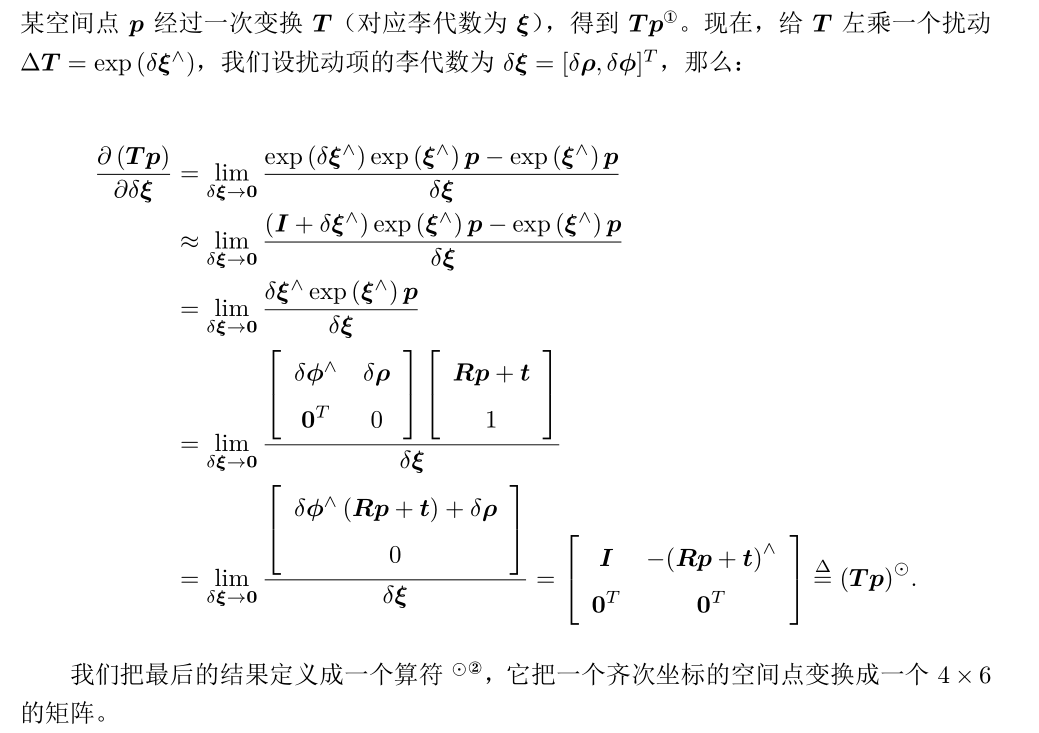
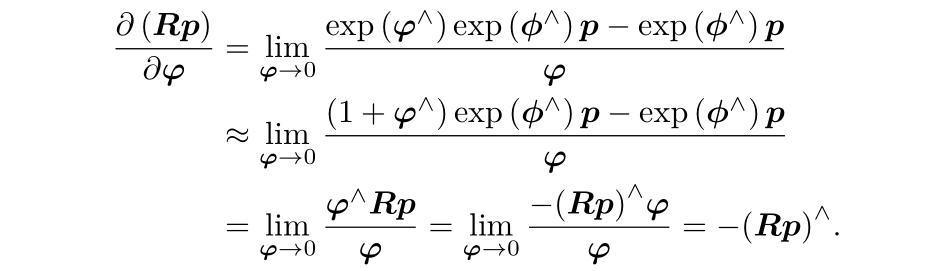
SO(3)上的扰动模型

SE(3)上的扰动模型