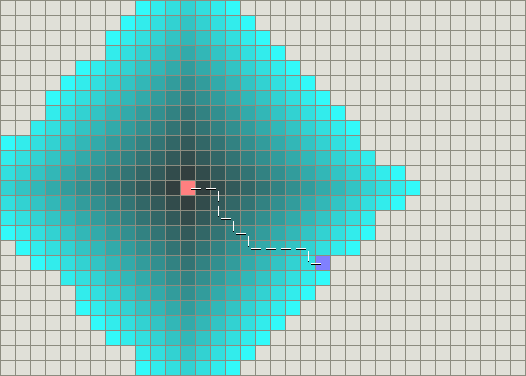
1,Dijkstra’s 算法
一种发散性寻找最短路径算法。
由起点开始向四周开始发散,直到碰到目标点为止。这时就是最短路径。优点:能找到与目标点的最短路径;缺点:搜索花费的时间会比较长。
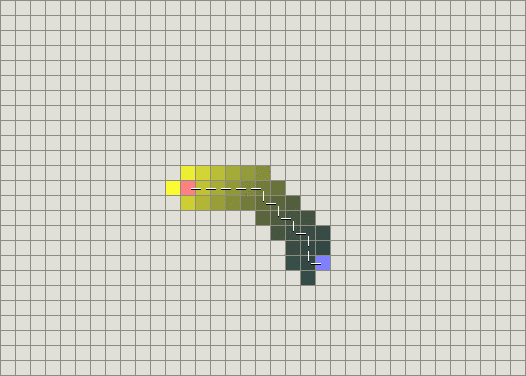
2,Greedy Best-First-Search 快速搜索算法。
启发性的算法,根据目标点的方向去搜索。优点:搜索快速。缺点:不一定是最短路径。
3,A*算法
A*算法被认为最有效的寻路算法。
结合了Dijkstra’s 算法和快速搜索算法的优点。
公式:F=G+H
其中G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
H = 从指定的方格移动到终点 B 的估算成本。这个通常被称为试探法
由一个open_list和一个close_list组成,
参考:http://blog.csdn.net/hitwhylz/article/details/23089415
参考:http://theory.stanford.edu/~amitp/GameProgramming/AStarComparison.html