| 这个作业属于哪个班级 | 数据结构--网络2011/2012 |
|---|---|
| 这个作业的地址 | DS博客作业04--图 |
| 这个作业的目标 | 学习图结构设计及相关算法 |
| 姓名 | 吴俊豪 |
0.PTA得分截图

1.本周学习总结
1.1 图的存储结构
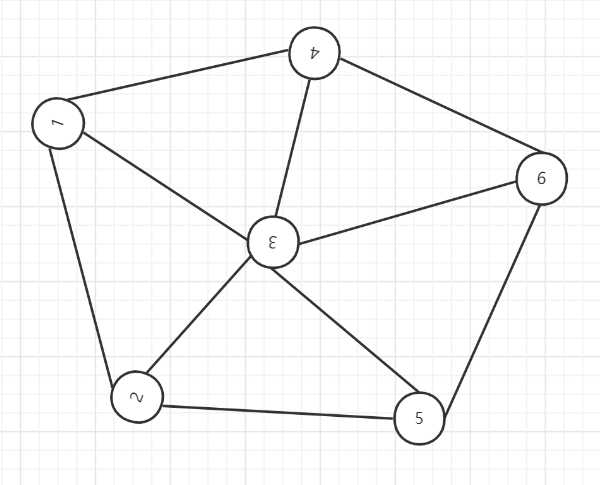
随手画个图先
1.1.1 邻接矩阵
邻接矩阵的结构体定义
typedef struct //图的定义
{ int edges[MAXV][MAXV]; //邻接矩阵
int n,e; //顶点数,边数
} MGraph; //图的邻接矩阵表示类型
建图函数
void CreateMGraph(MGraph& g, int n, int e)//建图
{
int i, j, a, b;
for (i = 0; i < n; i++)//初始化邻接矩阵
{
for (j = 0; j < n; j++)
{
g.edges[i][j] = 0;
}
}
for (i = 1; i <= e; i++)
{
cin >> a >> b;
g.edges[a][b] = 1;
g.edges[b][a] = 1;
}
g.n = n;
g.e = e;
}
1.1.2 邻接表
邻接表的结构体定义
typedef struct ANode
{ int adjvex; //该边的终点编号
struct ANode *nextarc; //指向下一条边的指针
int info; //该边的相关信息,如权重
} ArcNode; //边表节点类型
typedef int Vertex;
typedef struct Vnode
{ Vertex data; //顶点信息
ArcNode *firstarc; //指向第一条边
} VNode; //邻接表头节点类型
typedef VNode AdjList[MAXV];
typedef struct
{ AdjList adjlist; //邻接表
int n,e; //图中顶点数n和边数e
} AdjGraph;
建图函数
void CreateAdj(AdjGraph*& G, int n, int e) //创建图邻接表
{
int i, j;
int a, b;
ArcNode* p;
G = new AdjGraph;
G->e = e;
G->n = n;
for (i = 0; i <= n; i++)
{
G->adjlist[i].firstarc = NULL;
}
for (i = 1; i <= e; i++)
{
cin >> a >> b;
p = new ArcNode;
p->adjvex = b;
p->nextarc = G->adjlist[a].firstarc;
G->adjlist[a].firstarc = p;
p = new ArcNode;
p->adjvex = a;
p->nextarc = G->adjlist[b].firstarc;
G->adjlist[b].firstarc = p;
}
}
1.1.3 邻接矩阵和邻接表表示图的区别
一个我比较熟,一个不是很熟.
邻接矩阵:建立一个n*n的二维数组表示点与点之间的联系,其存在唯一,时间复杂度为O(n^2),对稠密图效果拔群(不过一般稀疏我也用).
领接表:建立n个链表来表示每一个结点和其他点之间的关系,存在不唯一,时间复杂度为O(n+e),对稀疏图效果略好.
1.2 图遍历
1.2.1 深度优先遍历
依然是这张图

遍历开始结点均为v=2;
邻接矩阵DFS
void DFS(MGraph g, int v)//深度遍历
{
MGraph* p;
int i = 0;
static int flag = 0;
visited[v] = 1;
if (!flag)
{
cout << v;
flag = 1;
}
else
{
cout << " " << v;
}
for (i = 1; i <= g.n; i++)
{
if (g.edges[v][i]!=0&&visited[i]==0)
{
DFS(g, i);
}
}
}
结果如下:
2 1 3 4 6 5
邻接表DFS
void DFS(AdjGraph* G, int v)//v节点开始深度遍历
{
ArcNode *p;
visited[v] = 1;
static int flag = 1;
if (flag)
{
cout << v;
flag = 0;
}
else
{
cout << " "<< v;
}
p = G->adjlist[v].firstarc;
while (p)
{
if (!visited[p->adjvex])
{
DFS(G, p->adjvex);
}
p = p->nextarc;
}
}
结果为:
2 5 6 4 3 1
1.2.2 广度优先遍历
邻接矩阵BFS
#include<queue>
void BFS(MGraph g, int v)//广度遍历
{
int t;
queue<int>q;
if (visited[v] == 0)
{
cout << v;
visited[v] = 1;
q.push(v);
}
while (!q.empty())
{
t = q.front();
q.pop();
for (int i = 1; i <= g.n; i++)
{
if (g.edges[t][i] == 1 && visited[i] == 0)
{
cout << " " << i;
visited[i] = 1;
q.push(i);
}
}
}
}
结果:
2 1 3 5 4 6
邻接表BFS
void BFS(AdjGraph* G, int v)
{
queue<int>q;
q.push(v);
ArcNode* p;
int flag_2 = 1;
int item;
cout << v;
visited[v] = 1; //当前节点已访问过,数组值置为1
while (!q.empty())
{
item = q.front();
p = G->adjlist[item].firstarc; //边指针ptr指向item表示的节点所连的第一条边
while (p != NULL)
{
if (visited[p->adjvex] == 0) //该边的终点还未被访问
{
q.push(p->adjvex);
visited[p->adjvex] = 1;
cout << " "<< p->adjvex;
}
p = p->nextarc;
}
q.pop();
}
}
结果:
2 5 3 1 6 4
可以看见,两种存储结构两种遍历结果有所差异,归其根本还是邻接表的表示方法不唯一.
1.3 最小生成树
所谓一个带权图的最小生成树,就是原图中边的权值最小的生成树,最小是指边的权值之和小于或者等于其它生成树的边的权值之和。
1.3.1 Prim算法求最小生成树
老图新用
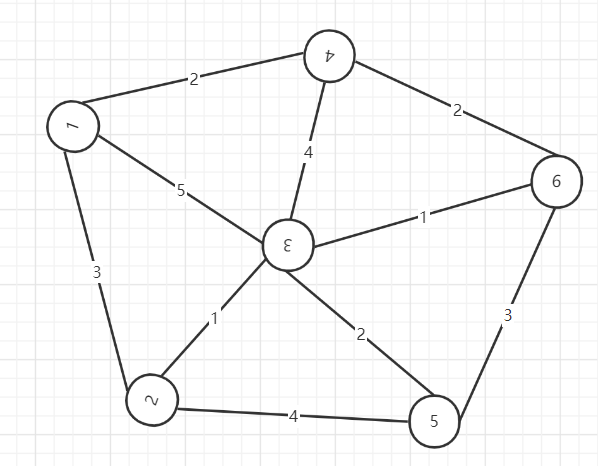
从节点v=1开始:
每次都寻找最小路径的下一个结点,被选中过的结点在visited数组里标记为1,直到找完n个结点.
实现Prim算法的2个辅助数组
visited[]:遍历时用到的数组,将经过的结点值置1.
lowcost[]:prim算法的核心数组, 用于比对并存放最小路径
Prim算法代码
int Prim(MGraph& g)//prim算法
{
int lowcost[MAXV] = { 0 };
int min, i, j, k;//最小 + 循环*2 + 防空
int lenth = 0;
lowcost[1] = 0;//从1村开始
for (i = 2; i <= g.n; i++)
{
lowcost[i] = g.edges[1][i];
}
for (i = 2; i <= g.n; i++)//行数
{
min = 66235;
j = 1;
k = 0;
while (j <= g.n)
{
if (lowcost[j] != 0 && lowcost[j] < min)
{
min = lowcost[j];
k = j;
}
j++;
}
if (k == 0)//有结点没遍历到
{
return -1;
}
lenth += min;
lowcost[k] = 0;
for (j = 2; j <= g.n; j++)
{
if (lowcost[j] != 0 && g.edges[k][j] < lowcost[j])
{
lowcost[j] = g.edges[k][j];//最小路径存入
}
}
}
return lenth;
}
分析Prim算法时间复杂度,适用什么图结构
Prim算法其时间复杂度为O(n^2),与边得数目无关,适合稠密图.
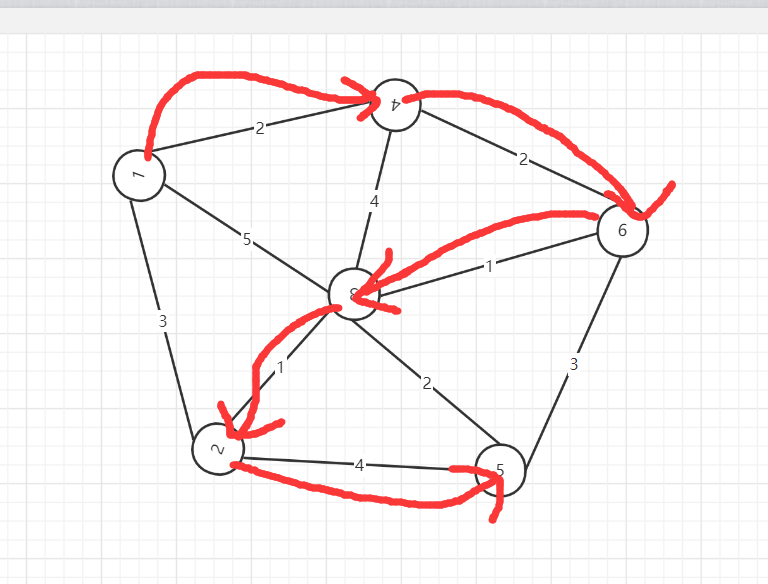
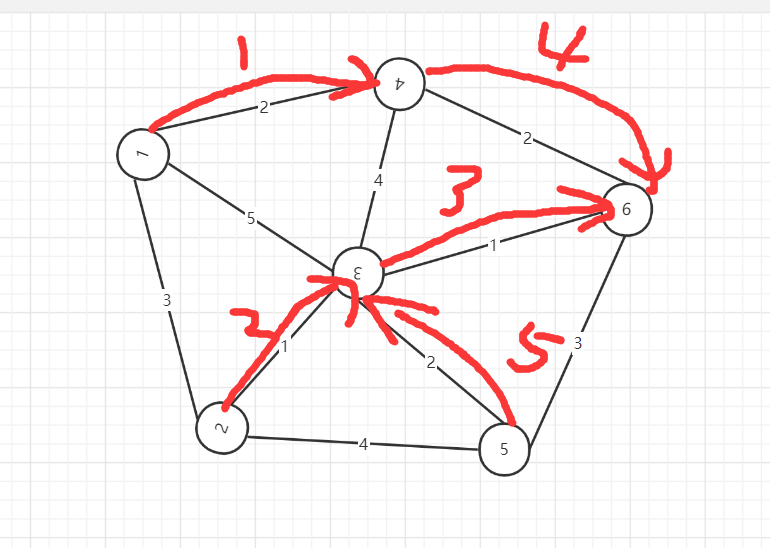
1.3.2 Kruskal算法求解最小生成树
基于上述图结构求Kruskal算法生成的最小生成树的边序列
代码
int Kruskal(int n, int m){
int nEdge = 0, res = 0;
//将边按照权值从小到大排序
qsort(a, n, sizeof(a[0]), cmp);
for(int i = 0; i < n && nEdge != m - 1; i++){
//判断当前这条边的两个端点是否属于同一棵树
if(find(a[i].a) != find(a[i].b)){
unite(a[i].a, a[i].b);
res += a[i].price;
nEdge++;
}
}
//如果加入边的数量小于m - 1,则表明该无向图不连通,等价于不存在最小生成树
if(nEdge < m-1) res = -1;
return res;
}
int main(){
int n, m, ans;
while(scanf("%d%d", &n, &m), n){
Init(m);
for(int i = 0; i < n; i++){
scanf("%d%d%d", &a[i].a, &a[i].b, &a[i].price);
//将村庄编号变为0~m-1(这个仅仅只是个人习惯,并非必要的)
a[i].a--;
a[i].b--;
}
ans = Kruskal(n, m);
if(ans == -1) printf("?
");
else printf("%d
", ans);
}
return 0;
}
时间复杂度为O(e*log e),适用于邻接矩阵
1.4 最短路径
1.4.1 Dijkstra算法求解最短路径
void Dijkstra_sort(Graph G,int v0)
{
int n=G.vexnum;
int Path[n];//记录前驱
int D[n]; //记录相对最短路径
bool S[n];//判断当前路径长度是否为最短路径
for(int i=0;i<n;i++)
{
S[i]=false;
D[i]=G.arc[v0][i];
if(D[i]<MaxInt)
Path[i]=v0;
else
Path[i]=-1;
}
S[v0]=true;
D[v0]=0;
//初始化
int v;
for(int i=0;i<n-1;i++)
{
int min=MaxInt;
for(int w=0;w<n;w++)
{
if(D[w]<min&&!S[w])
{
min=D[w];
v=w;
}
}
S[v]=true;
for(int w=0;w<n;w++)//修正贪心算法无法给出最优解的情况
{
if(!S[w]&&D[w]>(D[v]+G.arc[v][w]))
{
D[w]=D[v]+G.arc[v][w];
Path[w]=v;
}
}
}
for(int i=0;i<G.vexnum;i++)
{
if(i!=v0)
{
cout<<v0<<"到"<<i<<"的最短路径="<<D[i]<<endl;
cout<<"路线为: " ;
for(int k=i;k!=v0;k=Path[k])
{
cout<<k<<"<---";
}
cout<<v0<<endl;
}
}
}
时间复杂度为O(n^2).
1.4.2 Floyd算法求解最短路径
Floyd算法解决给定的加权图中顶点间的最短路径的一种算法,可以正确处理有向图或负权的最短路径问题
#include
int main()
{
int e[10][10],k,i,j,n,m,t1,t2,t3;
int inf=65535;
scanf("%d %d",&n,&m);
for(i=1;i<=n;i++)
for(j=1;j<=n;j++)
if(i==j) e[i][j]=0;
else e[i][j]=inf;
//读入边
for(i=1;i<=m;i++)
{
scanf("%d %d %d",&t1,&t2,&t3);
e[t1][t2]=t3;
}
//Floyd-Warshall算法核心语句
for(k=1;k<=n;k++)
for(i=1;i<=n;i++)
for(j=1;j<=n;j++)
if(e[i][j]>e[i][k]+e[k][j] )
e[i][j]=e[i][k]+e[k][j];
//输出最终的结果
for(i=1;i<=n;i++)
{
for(j=1;j<=n;j++)
{
printf("%10d",e[i][j]);
}
printf("
");
}
return 0;
}
算法优势:能计算任意两个节点之间的最短路径
1.5 拓扑排序
对一个有向无环图(Directed Acyclic Graph简称DAG)G进行拓扑排序,是将G中所有顶点排成一个线性序列,使得图中任意一对顶点u和v,若<u,v> ∈E(G),则u在线性序列中出现在v之前。
void toposort(int map[MAX][MAX],int indegree[MAX],int n)
{
int i,j,k;
for(i=0;i<n;i++) //遍历n次
{
for(j=0;j<n;j++) //找出入度为0的节点
{
if(indegree[j]==0)
{
indegree[j]--;
cout<<j<<endl;
for(k=0;k<n;k++) //删除与该节点关联的边
{
if(map[j][k]==1)
{
indegree[k]--;
}
}
break;
}
}
}
}
1.6 关键路径
AOE网
在一个表示工程的带权有向图中,用顶点表示事件(如V0),用有向边表示活动(如<v0,v1> = a1),边上的权值表示活动的持续时间,称这样的有向图为边表示的活动的网,简称AOE网
关键路径概念
具有最大路径长度的路径称为关键路径
关键活动
关键路径上的活动称为关键活动
2.PTA实验作业
2.1 六度空间
2.1.1 解题思路
对每个结点使用广度优先搜索距离小于6的结点,并统计个数,再使用层数(level)来表示距离,其中起始结点为第0层
在广度遍历的过程中,先将起始节点入队,在队列不为空的情况下逐层遍历并实时记录层数level,当level=6时跳出循环
2.1.2 提交列表

2.1.3 知识点
图结构邻接矩阵的创建+图的广度遍历
2.2 村村通
2.2.1 解题思路
利用prim算法将自v村开始遍历每一个村庄并将最小路径存入lowcost[]中,将经过的村庄的visited[]置1,最后再遍历visited[]是否有村庄不通,若全通则将lowcost中的最短路径相加并输出
2.2.2 提交列表

2.2.3 知识点
邻接矩阵的创建+prim算法