系统要求:Ubuntu1604
ROS安装版本: Kinetic
安装步骤:
1、添加 sources.list(设置你的电脑可以从 packages.ros.org 接收软件.)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2、添加 keys
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3、安装
首先,确保你的Debian软件包索引是最新的:
sudo apt-get update4、安装桌面完整版 : 包含ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及2D/3D感知
sudo apt-get install ros-kinetic-desktop-full
5、初始化 rosdep(在开始使用ROS之前你还需要初始化rosdep。rosdep可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。)
-
sudo rosdep init
-
rosdep update
如果出现错误:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决办法,执行如下命令
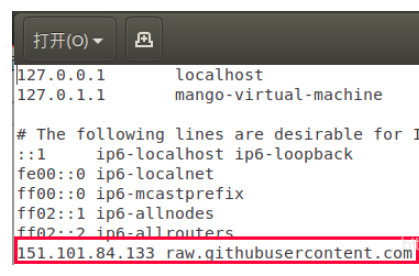
cd /etc
sudo gedit hosts
在文件末尾添加
151.101.84.133 raw.githubusercontent.com
如果出现如下错误:
ERROR: error loading sources list:
('The read operation timed out',)解决办法:大概是网络的问题,反复执行rosdep update命令即可
(如图,我执行了几次rosdep update命令运行成功!)
6、环境配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
7、构建工厂依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
至此已经在Ubuntu1604的系统中完整安装ROS Kinetic
8、验证安装是否成功(输入以下命令,如果正常运行会出现下面内容,则说明安装成功)

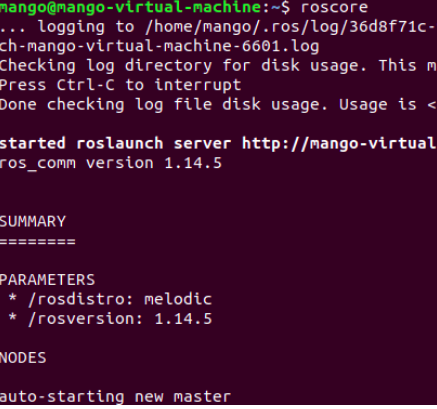
roscore
输出
Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://buu:38123/ ros_comm version 1.12.14 SUMMARY ======== PARAMETERS * /rosdistro: kinetic * /rosversion: 1.12.14 NODES auto-starting new master process[master]: started with pid [12249] ROS_MASTER_URI=http://buu:11311/ setting /run_id to 2a96a0c0-a2e1-11e9-bea8-484d7e9d8441 process[rosout-1]: started with pid [12262] started core service [/rosout]
9小乌龟验证
第一个终端运行如下命令
roscore
打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
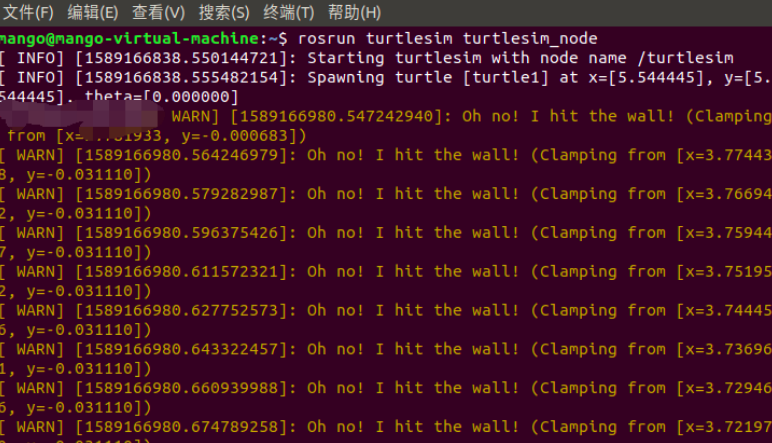
rosrun turtlesim turtlesim_node
如果希望小海龟能够移动,打开第三个终端,利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
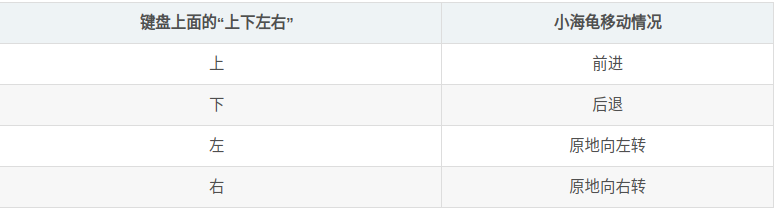
在当前终端下,按住方向键即可控制小海龟移动,我控制的小海龟移动情况如下

更多安装
构建ROS软件包
sudo apt-get install build-essential python-rosdep python-catkin-tools
找不到python-catkin-tools包
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" > /etc/apt/sources.list.d/ros-latest.list' wget http://packages.ros.org/ros.key -O - | sudo apt-key add - sudo apt-get update sudo apt-get install python-catkin-tools
问题1
- 如果出现如下问题
E: 无法获得锁 /var/lib/dpkg/lock-frontend - open (11: 资源暂时不可用)
E: 无法获取 dpkg 前端锁 (/var/lib/dpkg/lock-frontend),是否有其他进程正占用它?
解决办法,执行如下命令,删除 /var/lib/dpkg/lock-frontend - open
ls /var/lib/dpkg/lock-frontend sudo rm -r -f /var/lib/dpkg/lock-frontend sudo rm -r -f /var/lib/dpkg/lock
问题2
避免后面出现sudo rosdep:找不到命令提示,这里需要执行如下命令
sudo apt install python-rosdep