/*
//rostopic pub -1 led_out_kay std_msgs/Byte 1 // 用户1 LED On
//rostopic pub -1 led_out_kay std_msgs/Byte 2 // 用户2 LED On
//rostopic pub -1 led_out_kay std_msgs/Byte 4 // 用户3 LED On
//rostopic pub -1 led_out_kay std_msgs/Byte 8 // 用户4 LED On
//rostopic pub -1 led_out_kay std_msgs/Byte 0 // LED all Off
*/
#include <ros.h>
#include <ros/time.h>
#include <geometry_msgs/Vector3.h>//Subscriber
#include <geometry_msgs/Twist.h>
#include <std_msgs/String.h>//std_msgs
#include <std_msgs/Byte.h>
/*******************************************************************************
ROS NodeHandle
*******************************************************************************/
ros::NodeHandle nh;
int led_pin_user[4] = { BDPIN_LED_USER_1, BDPIN_LED_USER_2, BDPIN_LED_USER_3, BDPIN_LED_USER_4 };
void hellokay(const std_msgs::Byte& led_msg);
/*******************************************************************************
Subscriber
*******************************************************************************/
ros::Subscriber<std_msgs::Byte> cmd_kay_sub("led_out_kay", hellokay );//led_out_kay话题,调用终端来控制
//四个LED定义为led_out订阅者
//1:打开一个终端,运行roscore
//2.下载这个程序
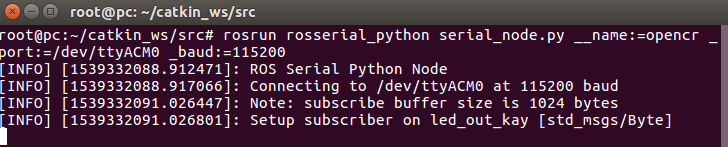
//3.再打开另一个终端,运行rosrun rosserial_python serial_node.py __name:=opencr _port:=/dev/ttyACM0 _baud:=115200
//前提:安装了rosserial_python
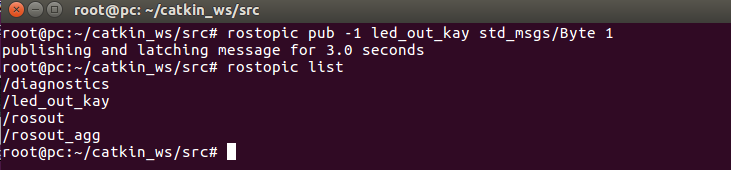
//4.再次打开一个终端,运行rotopic list 查看有没有 /led_out_kay这个话题,有说明程序正确
//5.再打开一个终端,运行rostopic pub -1 led_out_kay std_msgs/Byte 1
//你会发现,第一个用户led灯亮,测试完成
void setup()
{
pinMode(led_pin_user[0], OUTPUT);
pinMode(led_pin_user[1], OUTPUT);
pinMode(led_pin_user[2], OUTPUT);
pinMode(led_pin_user[3], OUTPUT);
nh.initNode();//初始化节点
nh.subscribe(cmd_kay_sub);
}
void loop()
{
nh.spinOnce(); //loop函数中,调用了ros::spinOnce(),在这个函数中,所有ROS通信的回调函数都被处理
}
//如果传递的消息值的0~3位bit值为1,则打开相应的LED,反之关闭相应的LED。
void hellokay(const std_msgs::Byte& led_msg)//ROS标准数据类型std_msg/Byte
{
int i;
for (i = 0; i < 4; i++)
{
if (led_msg.data & (1 << i))//led_msg.data为参数,参数决定开关,没毛病&&&&&&&&
{
digitalWrite(led_pin_user[i], LOW);
}
else
{
digitalWrite(led_pin_user[i], HIGH);
}
}
}
图附上: