相机
每个硬件版本中摄像头的方向都不同,在HWRev 1.1的情况下,相同的摄像头模型可以有不同的方向,这里是一个显示不同摄像头和相关方向的图像:
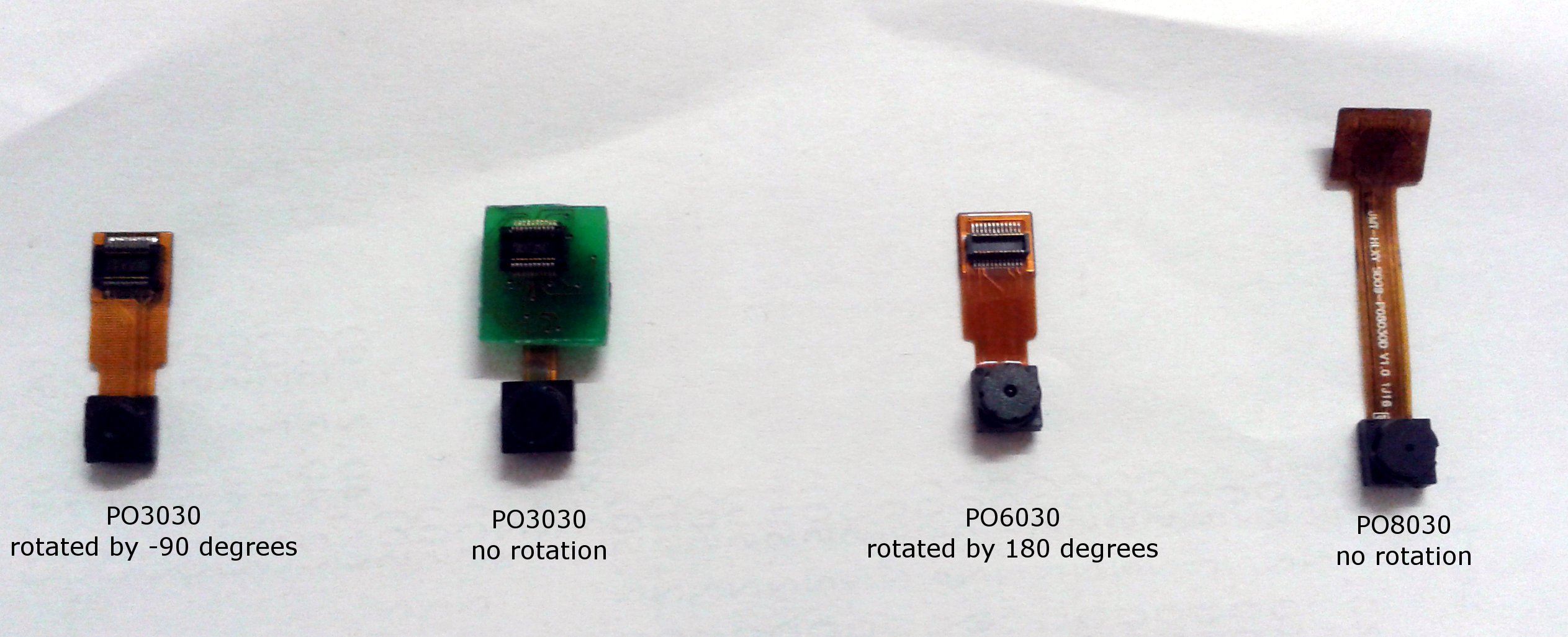
e-puck库配置摄像机,以便为所有情况获得正确的方向,除非它旋转90度。 为了让用户区分安装在机器人上的当前相机并且在旋转90度的情况下应用相关处理,基于安装在机器人上的相机模型及其方向来修改EEPROM。 此修改遵循以下规则:修改仅适用于EEPROM的最后一个字,地址为0x7FFFFE; 位14和15用于指示旋转(11 =无旋转,01 = 90度,10 = -90度,00 = 180度),位12和13用于指示相机型号(11 = PO3030,10 = PO6030,01 = PO8030)。 因此,EEPROM的可能值如下:
- 0xFFFF(0xFFF1111):PO3030没有旋转
- 0xFFFE(0xFFF1110):PO3030转动-90度
- 0xFFF9(0xFFF1000):PO6030旋转180度
- 0xFFF7(0xFFF0111):PO8030没有旋转
以下示例说明了如何阅读此word:
#include <DataEEPROM.h> /*read HW version from the eeprom (last word)*/ int HWversion=0xFFFF; int temp = 0; temp = ReadEE(0x7F,0xFFFE,&HWversion, 1);
该项目(src)是如何写入EEPROM的最后一个字的示例。
请注意,并非所有机器人都附带按先前规定编程的EEPROM。 用户可以通过简单地使用高级sercom演示(选择器选择位置3)并请求版本(command v)来检查此修改。 该命令返回的硬件版本对应于EEPROM的最后一个字的值。
加速度计
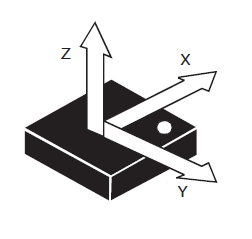
安装在机器人上的实际加速度计在启动时由库自动检测。 数字加速度计的值范围与模拟加速度计不同,但是库将它们缩放为相似,以便与现有演示兼容。 加速度计的方向如下所示,x轴指向左,y轴指向前方,z指向上方:
对于使用e-puck HWRev1.3和gumstix扩展的用户,请参阅加速度计和陀螺仪(e-puck_HWRev_1.3)部分。
麦克风
从HWRev 1.3开始,麦克风灵敏度与之前的硬件版本略有不同; 一些实证测试表明差异大约为±15%,因此请注意在需要时调整应用程序中的阈值。
陀螺仪
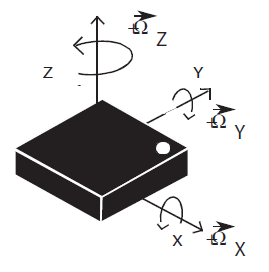
陀螺仪可从HWRev 1.3获得。 陀螺仪的方向如下所示,x轴指向前方,y轴指向左侧,z轴指向上方:
对于使用e-puck HWRev1.3和gumstix扩展的用户,请参阅加速度计和陀螺仪(e-puck_HWRev_1.3)部分。
数据手册