下载并安装Ubuntu映像文件
[TurtleBot3]
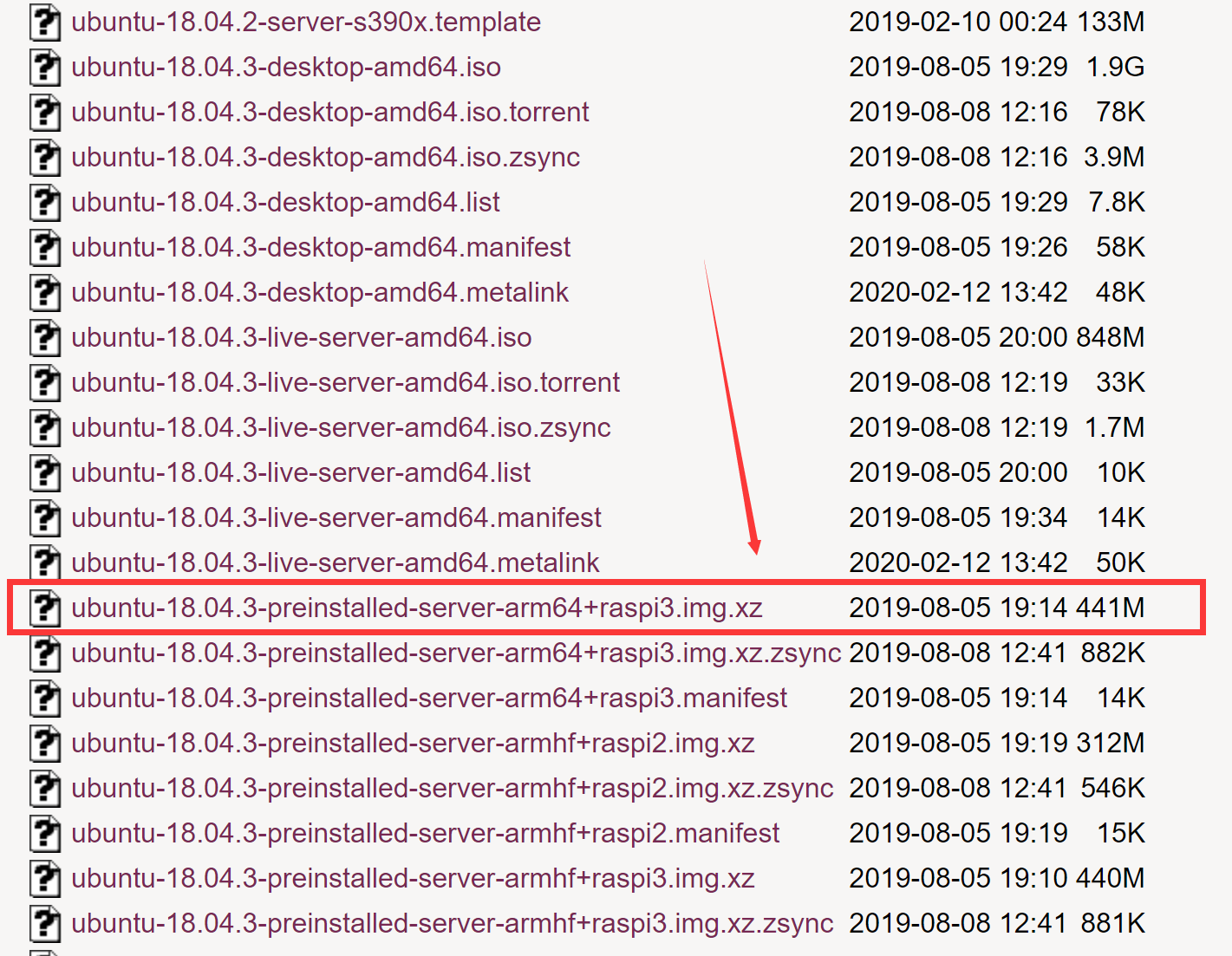
1.转到Ubuntu旧版本。
2.在远程PC上下载ubuntu-18.04.3-preinstalled-server-arm64+raspi3.img.xz
3.将Ubuntu映像文件刻录到microSD卡。
提示:您可以GNOME Disks用来刻录ubuntu-18.04.3-preinstalled-server-arm64+raspi3.img.xz到microSD。
Raspberry Pi 3的初始化过程
[TurtleBot3]
将具有图像文件的microSD卡插入TurtleBot3的SBC上的microSD卡插槽中后,启动Raspberry Pi 3。
(您可以将HDMI电缆,键盘和鼠标连接到TurtleBot3中)
使用默认的用户名(ubuntu)和密码(ubuntu)登录。
(登录后,系统会询问您是否更改密码)
您可以利用netplan配置WiFi网络设置。请参阅Netwrok配置示例。
注意:TurtleBot3是一种移动机器人,可以使用无线网络运行SLAM和Navigation2,因此建议将TurtleBot3连接到Wifi。
网络配置
[TurtleBot3]
在SBC上打开终端
创建一个文件夹,然后使用以下命令将其打开。
sudo touch /etc/netplan/01-netcfg.yaml sudo nano /etc/netplan/01-netcfg.yaml
打开文件后,如下所示输入网络设置。请注意每行的缩进。
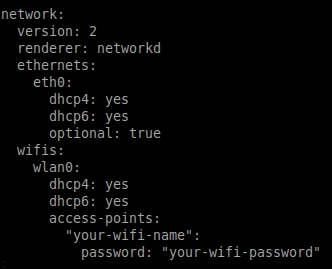
配置完成后,远程PC可以按照以下步骤连接到TurtleBot3中的SBC。
应用渲染器的所有配置,然后重新启动Raspberry Pi 3。
sudo netplan apply reboot
设置systemd可以防止启动延迟,即使启动时没有网络也是如此。运行以下命令以systemd使用以下命令设置掩蔽该过程。
systemctl mask systemd-networkd-wait-online.service
从现在开始,您可以使用SSH。请参阅将远程PC连接到SBC
PC远程连接到SBC
[远程PC]
在远程PC上打开终端
使用以下命令。
ssh ubuntu@<NETWORK IP of Raspberry PI>
更新和升级
sudo apt update && sudo apt upgrade
设定地区
sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8
设定源
sudo apt update && sudo apt install curl gnupg2 lsb-release curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list'
安装ROS 2软件包
sudo apt update sudo apt install ros-dashing-ros-base
安装TurtleBot3软件包
sudo apt install python3-argcomplete python3-colcon-common-extensions libboost-system-dev build-essential mkdir -p ~/turtlebot3_ws/src && cd ~/turtlebot3_ws/src git clone -b ros2 https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git git clone -b ros2 https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b ros2 https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b ros2 https://github.com/ROBOTIS-GIT/DynamixelSDK.git cd ~/turtlebot3_ws/src/turtlebot3 rm -r turtlebot3_cartographer turtlebot3_navigation2 cd ~/turtlebot3_ws/ echo 'source /opt/ros/dashing/setup.bash' >> ~/.bashrc source ~/.bashrc colcon build --symlink-install --parallel-workers 1