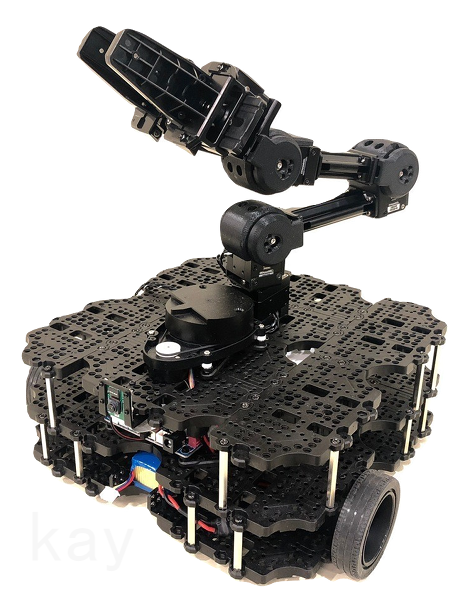
TurtleBot3和OpenMANIPULATOR组合
依赖
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers
为OpenMANIPULATOR-X安装相关的软件包。 在终端窗口中运行以下命令。
sudo apt-get install ros-kinetic-gazebo* sudo apt-get install ros-kinetic-moveit*
sudo apt-get install ros-kinetic-industrial-core sudo apt-get install ros-kinetic-dynamixel-sdk sudo apt-get install ros-kinetic-ros-controllers sudo apt-get install ros-kinetic-qt-build sudo apt-get install ros-kinetic-robotis-math
软件设置
cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench.git git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench-msgs.git git clone https://github.com/ROBOTIS-GIT/open_manipulator.git git clone https://github.com/ROBOTIS-GIT/open_manipulator_msgs.git git clone https://github.com/ROBOTIS-GIT/open_manipulator_simulations.git git clone https://github.com/ROBOTIS-GIT/robotis_manipulator.git cd ~/catkin_ws && catkin_make
cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation_simulations.git cd ~/catkin_ws && catkin_make
启动
[Remote PC]
roscore
export TURTLEBOT3_MODEL=waffle_pi
[TurtleBot3 SBC]
roslaunch turtlebot3_bringup turtlebot3_robot.launch
[Remote PC]
roslaunch turtlebot3_manipulation_bringup turtlebot3_manipulation_bringup.launch
roslaunch turtlebot3_manipulation_moveit_config move_group.launch
roslaunch turtlebot3_manipulation_moveit_config moveit_rviz.launch
[TurtleBot3 SBC]
仿真
[远程PC]使用以下命令将进入带有TurtleBot3_OpenMANIPULATOR仿真模型Gazebo仿真环境。
roslaunch turtlebot3_manipulation_gazebo turtlebot3_manipulation_gazebo.launch

roslaunch turtlebot3_manipulation_moveit_config move_group.launch
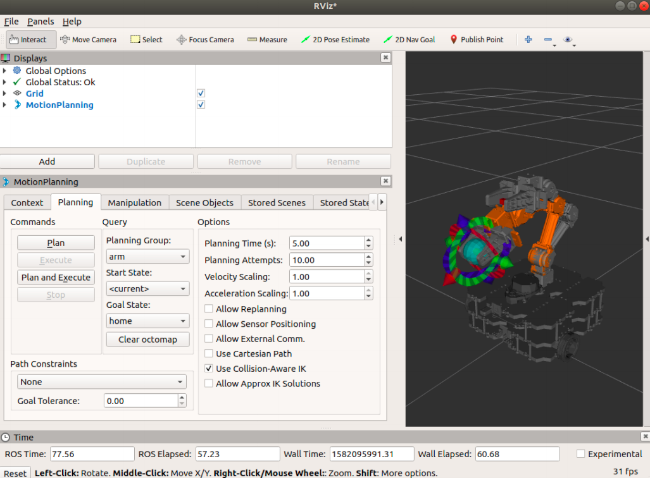
Rviz
roslaunch turtlebot3_manipulation_moveit_config moveit_rviz.launch
SBC
export OPENCR_PORT=/dev/ttyACM0 export OPENCR_MODEL=om_with_tb3 rm -rf ./opencr_update.tar.bz2 wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 tar -xvf opencr_update.tar.bz2 cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..
roscore
roslaunch turtlebot3_bringup turtlebot3_robot.launch
[Remote PC]
roslaunch turtlebot3_manipulation_bringup turtlebot3_manipulation_bringup.launch
roslaunch turtlebot3_manipulation_moveit_config move_group.launch
roslaunch turtlebot3_manipulation_moveit_config moveit_rviz.launch
roslaunch turtlebot3_manipulation_gui turtlebot3_manipulation_gui.launch

导航
roslaunch turtlebot3_manipulation_navigation navigation.launch
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml