http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/imgtrans/warp_affine/warp_affine.html
原理
什么是仿射变换?
-
一个任意的仿射变换都能表示为 乘以一个矩阵 (线性变换) 接着再 加上一个向量 (平移).
-
综上所述, 我们能够用仿射变换来表示:
- 旋转 (线性变换)
- 平移 (向量加)
- 缩放操作 (线性变换)
你现在可以知道, 事实上, 仿射变换代表的是两幅图之间的 关系 .
-
我们通常使用
 矩阵来表示仿射变换.
矩阵来表示仿射变换.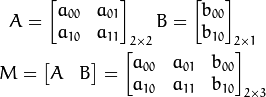
考虑到我们要使用矩阵
 和
和  对二维向量
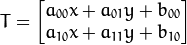
对二维向量  做变换, 所以也能表示为下列形式:
做变换, 所以也能表示为下列形式: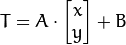 or
or ![T = M cdot [x, y, 1]^{T}](http://www.opencv.org.cn/opencvdoc/2.3.2/html/_images/math/f44f98e19b4ee0613633b70414a47259846b2d27.png)
怎样才能求得一个仿射变换?
-
好问题. 我们在上文有提到过仿射变换基本表示的就是两幅图片之间的 联系 . 关于这种联系的信息大致可从以下两种场景获得:
- 我们已知
 和 T 而且我们知道他们是有联系的. 接下来我们的工作就是求出矩阵
和 T 而且我们知道他们是有联系的. 接下来我们的工作就是求出矩阵 
- 我们已知 and . 要想求得
 . 我们只要应用算式
. 我们只要应用算式  即可. 对于这种联系的信息可以用矩阵 清晰的表达 (即给出明确的2×3矩阵) 或者也可以用两幅图片点之间几何关系来表达.
即可. 对于这种联系的信息可以用矩阵 清晰的表达 (即给出明确的2×3矩阵) 或者也可以用两幅图片点之间几何关系来表达.
- 我们已知
-
让我们形象地说明一下. 因为矩阵
联系着两幅图片, 我们以其表示两图中各三点直接的联系为例. 见下图: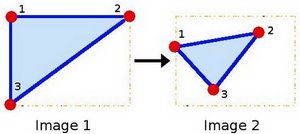
点1, 2 和 3 (在图一中形成一个三角形) 与图二中三个点一一映射, 仍然形成三角形, 但形状已经大大改变. 如果我们能通过这样两组三点求出仿射变换 (你能选择自己喜欢的点), 接下来我们就能把仿射变换应用到图像中所有的点.
例程
- 这个例程是做什么的?
- 加载一幅图片
- 对这幅图片应用仿射变换. 这个变换是从源图像和目标图像的两组三点之间的联系获得的. 这一步我们使用函数 warpAffine 来实现.
- 仿射变换结束后再对图像应用旋转. 这里的旋转绕图像中点
- 等待用户退出程序
- 例程代码在下面给出. 当然你也可以从 这里 下载
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
using namespace cv;
using namespace std;
/// 全局变量
char* source_window = "Source image";
char* warp_window = "Warp";
char* warp_rotate_window = "Warp + Rotate";
/** @function main */
int main( int argc, char** argv )
{
Point2f srcTri[3];
Point2f dstTri[3];
Mat rot_mat( 2, 3, CV_32FC1 );
Mat warp_mat( 2, 3, CV_32FC1 );
Mat src, warp_dst, warp_rotate_dst;
/// 加载源图像
src = imread( argv[1], 1 );
/// 设置目标图像的大小和类型与源图像一致
warp_dst = Mat::zeros( src.rows, src.cols, src.type() );
/// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = Point2f( 0,0 );
srcTri[1] = Point2f( src.cols - 1, 0 );
srcTri[2] = Point2f( 0, src.rows - 1 );
dstTri[0] = Point2f( src.cols*0.0, src.rows*0.33 );
dstTri[1] = Point2f( src.cols*0.85, src.rows*0.25 );
dstTri[2] = Point2f( src.cols*0.15, src.rows*0.7 );
/// 求得仿射变换
warp_mat = getAffineTransform( srcTri, dstTri );
/// 对源图像应用上面求得的仿射变换
warpAffine( src, warp_dst, warp_mat, warp_dst.size() );
/** 对图像扭曲后再旋转 */
/// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point( warp_dst.cols/2