
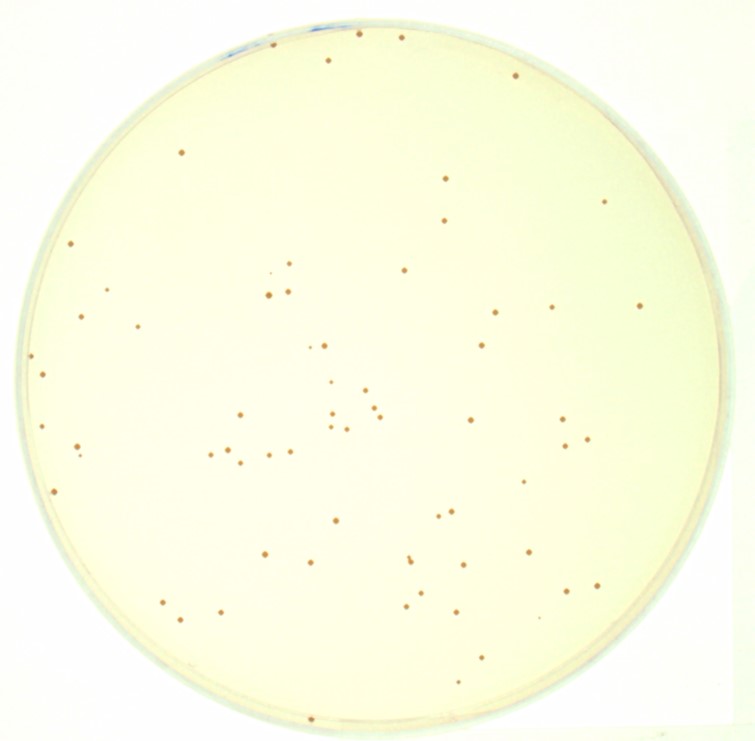
原图如上,目标是从这副图片中寻找“细胞”区域。
难点分析:现实采集的图像,质量还是存在一定问题。边界部分可能有所干扰。
参考代码:
const cv::Mat in = cv::imread("e:/template/findcircle.jpg");
cv::Mat src;
cv::dilate(in, src, cv::Mat(), cv::Point(-1, -1), 2);
cv::erode(src, src, cv::Mat(), cv::Point(-1, -1), 2);
cv::Mat hsv;
cv::cvtColor(src, hsv, cv::COLOR_BGR2HSV);
std::vector<cv::Mat> split_s;
cv::split(hsv, split_s);
split_s[1] = split_s[1] > 70;
cv::dilate(split_s[1], split_s[1], cv::Mat());
std::vector<std::vector<cv::Point> > contours;
findContours(split_s[1], contours, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
cv::Rect r = cv::boundingRect(contours[i]);
cv::Mat resized;
cv::resize(in(r), resized, cv::Size(5, 5), 0, 0);
cv::Scalar mean_s = cv::mean(resized);
if ((mean_s[0] > 120) & (mean_s[0] < 200))
{
cv::drawContours(in, contours, i, cv::Scalar(0, 255, 0), 1);
cv::rectangle(in, r, cv::Scalar(0, 0, 255), 1);
}
}
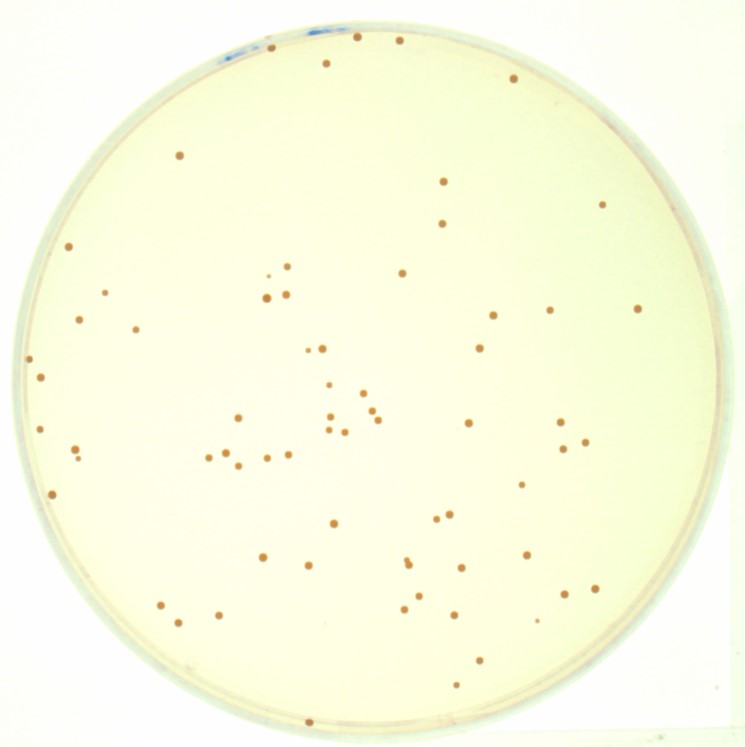
cv::imshow("result", in);处理结果:

非常好,完全找到了所有目标。
代码分析:
1、彩色图像直接进行形态学变换,这个是我之前见的比较少的;
| dilate | erode |
 |  |
其中,形态学的参数(步长 interation)起到一定作用。但是这个参数对于结果的贡献是不稳定的。
2、代码的书写细节有多处值得学习:
const cv::Mat in 在获取图片的时候,使用const,本例证明即使原图像标注为const也是可以绘制的;
std::vector<cv::Mat> split_s;这个命名值得学习;
split_s[1] = split_s[1] > 70;过滤掉“浑浊区域”效果良好
| before | after |
 |  |
3、值得改进的地方
主要算法不稳定,仅使用了轮廓的”面积特征“,尝试findblob进行进一步的分析研究。
const cv::Mat in = cv::imread("e:/template/findcircle.jpg");
cv::Mat src;
cv::dilate(in, src, cv::Mat());
cv::erode(src, src, cv::Mat());
cv::Mat hsv;
cv::cvtColor(src, hsv, cv::COLOR_BGR2HSV);
std::vector<cv::Mat> split_s;
cv::split(hsv, split_s);
split_s[1] = split_s[1] > 70;
SimpleBlobDetector::Params params;
params.filterByColor = false;
params.minThreshold = 120;
vector<KeyPoint> keypoints;
Ptr<SimpleBlobDetector> detector = SimpleBlobDetector::create(params);
detector->detect(split_s[1], keypoints);
drawKeypoints(in, keypoints, in, Scalar(0, 0, 255), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
改变的地方还包括取消了基础形态学变换的参数,或者直接取消形态学变化。
比较这两种算法,都无法正确处理“粘连”区域。但是我认为findblob方法使用了更少参数,因此更稳定,我更倾向于使用这种方法。下一步如果需要继续研究,首先必须制作数据集并进行针对性实验。
| 原方法错误识别“粘连”区域 | findblob没有识别“粘连”区域 |
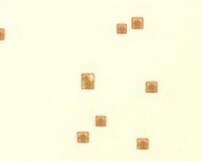 | 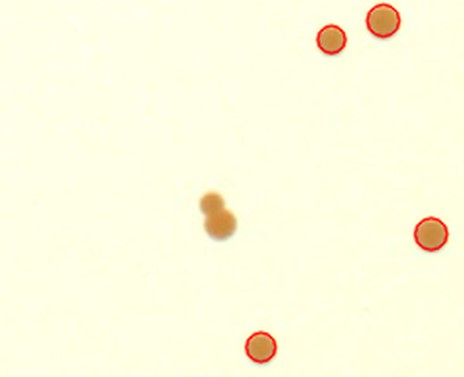 |