method1: BaoXing
ref: Curb-Intersection Feature Based Monte Carlo Localization on Urban Roads
- segmentation of laser scan
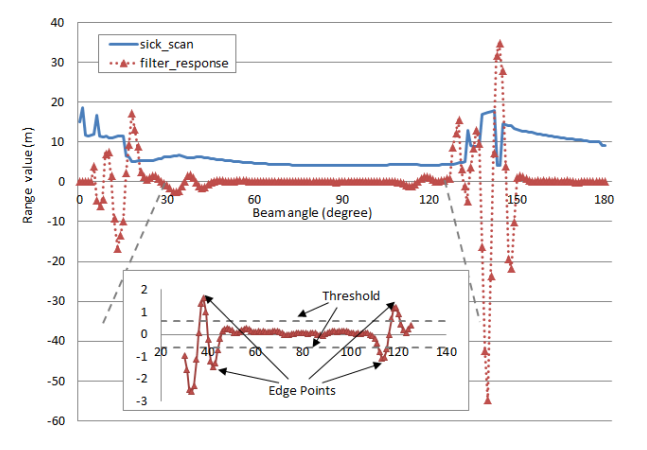
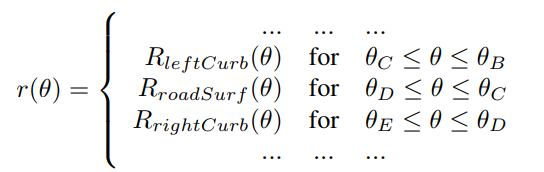
- piecewise function of laserscan
- use second-order differential filter to get local minimum-maximum detection point
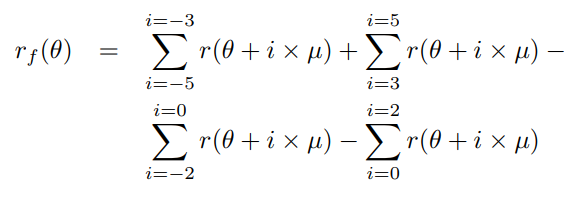
we can think this as, after discussion woth Peng, we believe it's one-order differential function(the same in the picture, red curve):

- resampling
- curb-intersection measurement model
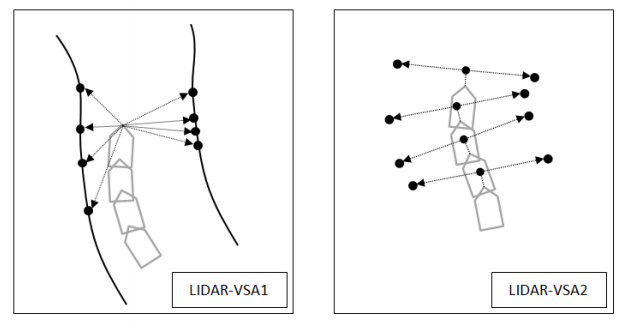
- LIDAR-VSA1
accumulate these curb point, and translate them to last coordinate - LIDAR-VSA2
it's just two parallel point, tagent to CD.And whenever at intersection, we get two these points