floyd算法:
解决任意两点间的最短路径的一种算法,可以正确处理有向图或负权的最短路径问题,同时也被用于计算有向图的传递闭包。
设
为从
到
的只以
集合中的节点为中间节点的最短路径的长度。
- 若最短路径经过点k,则
;
- 若最短路径不经过点k,则
。
因此,
。
在实际算法中,为了节约空间,可以直接在原来空间上进行迭代,这样空间可降至二维。
我的理解为:
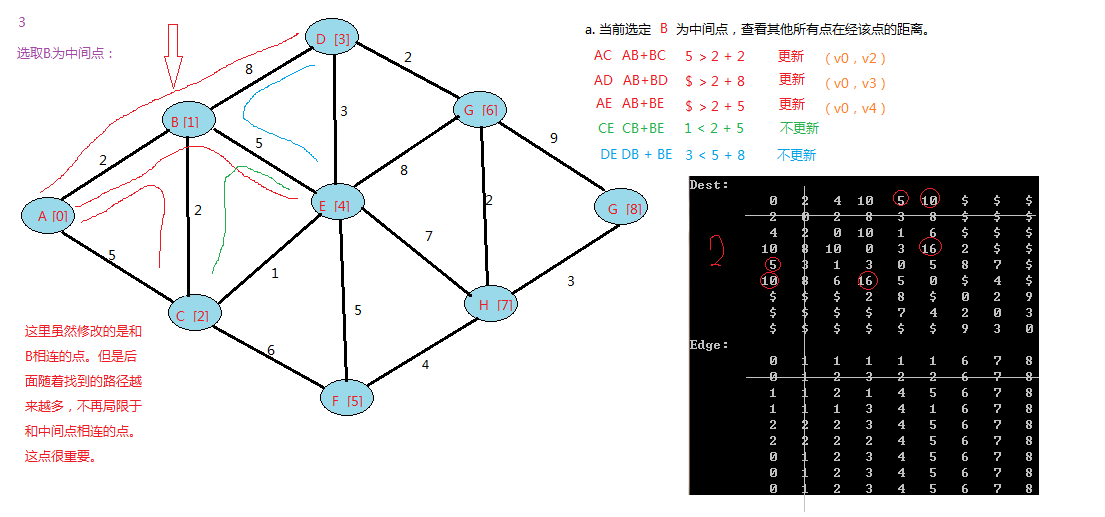
folyd算法是每次选定一个点,查看任意两个顶点的距离是否都小于经过这个点之和的距离。
即:假如ABC三个顶点相连,选定C的时候,查AB的距离是否大于 AC + CB 的距离之和,
如果大于说明找到了一个更短的路径,即A->C->B。
下面是我的例子:


floyd算法是一个动态规划的过程,可以上网查下图中中关于它的证明。
代码:
void floyd(MGraph g,EdgeType *des,EdgeType *path) { //初始化 des,path int i,j; for (i=0;i<g.numVexs;i++) { for (j=0;j<g.numVexs;j++) { *(des + i*MAXVEX +j) = g.Mat[i][j]; *(path + i*MAXVEX +j) = j; } } int k; for (k=0;k<g.numVexs;k++) { for (i=0;i<g.numVexs;i++) { for (j=0;j<g.numVexs;j++) { //printf("[%d][%d]---%d [%d][%d]+[%d][%d]---%d\n", i,j,*(des +i*MAXVEX +j),i,k,k,j,g.Mat[i][k] + g.Mat[k][j]); if ( *(des +i*MAXVEX +j) > *(des +i*MAXVEX +k) + *(des + k*MAXVEX + j)) { *( des + i*MAXVEX +j ) = *(des +i*MAXVEX +k) + *(des + k*MAXVEX + j); *( path + i*MAXVEX + j ) = *(path+i*MAXVEX +k); } } } if (k == 5) { break; } } }
第一个for是初始化,第二个for快里面嵌入2个for循环,三个for循环完成最短路径的查找,算法很神奇。
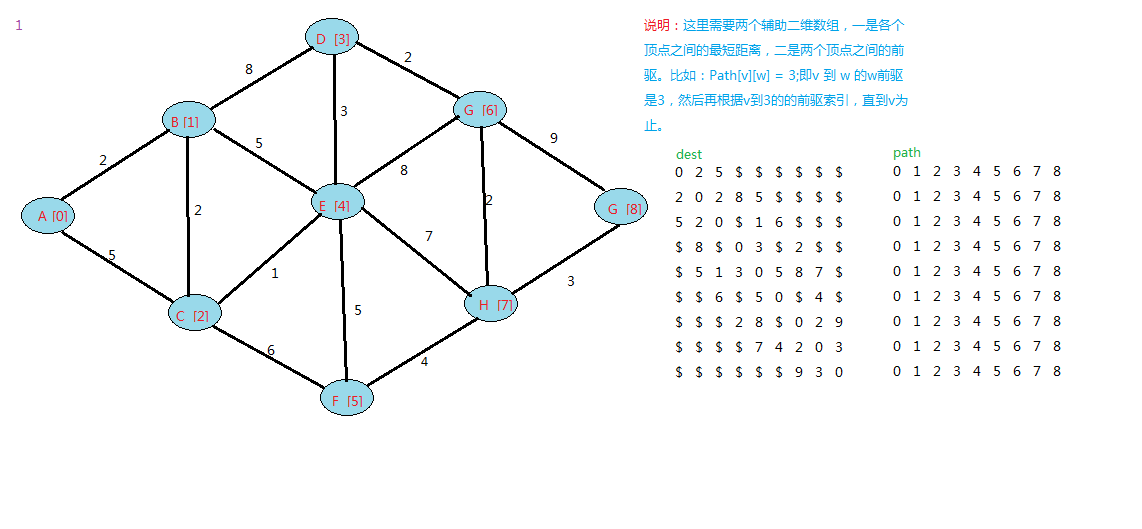
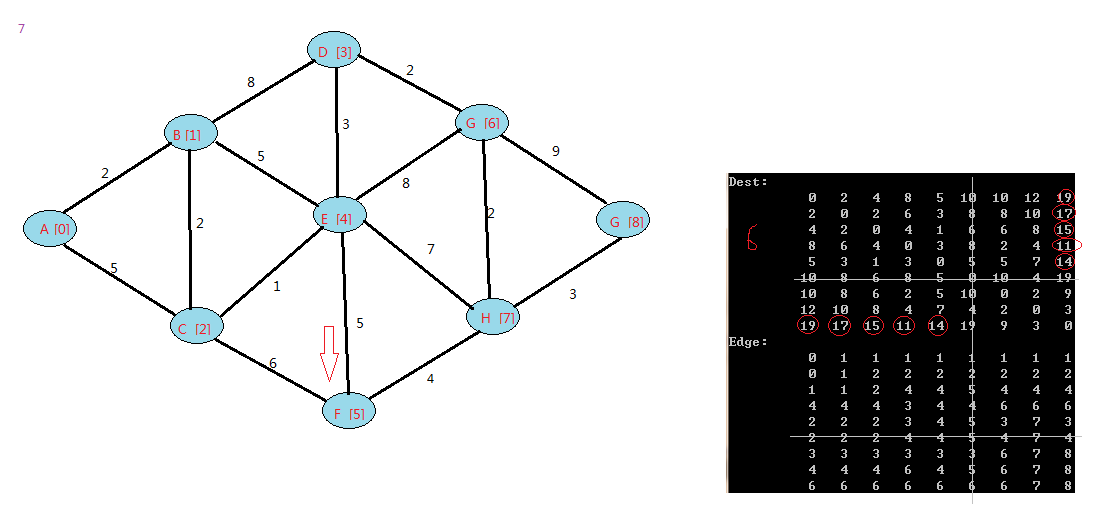
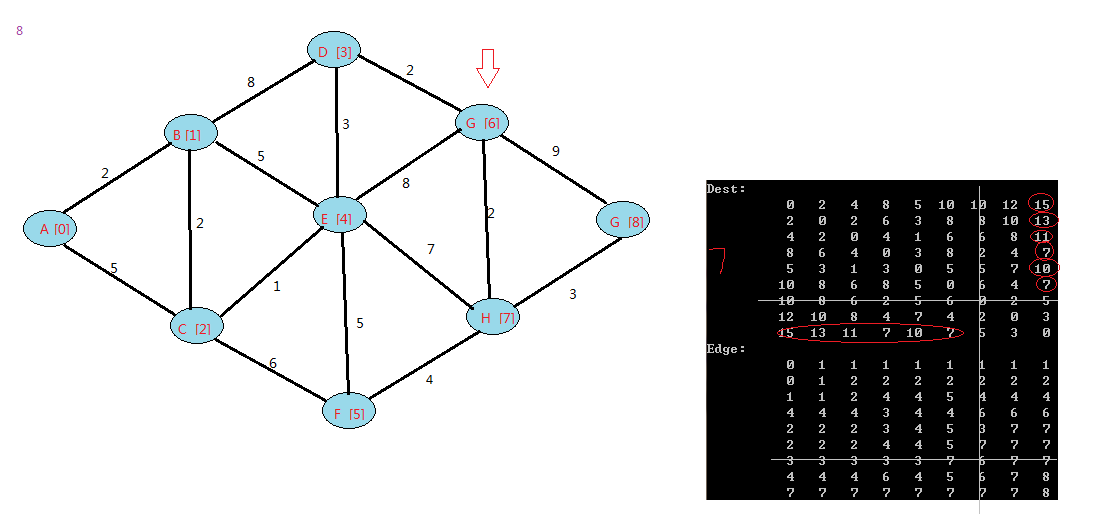
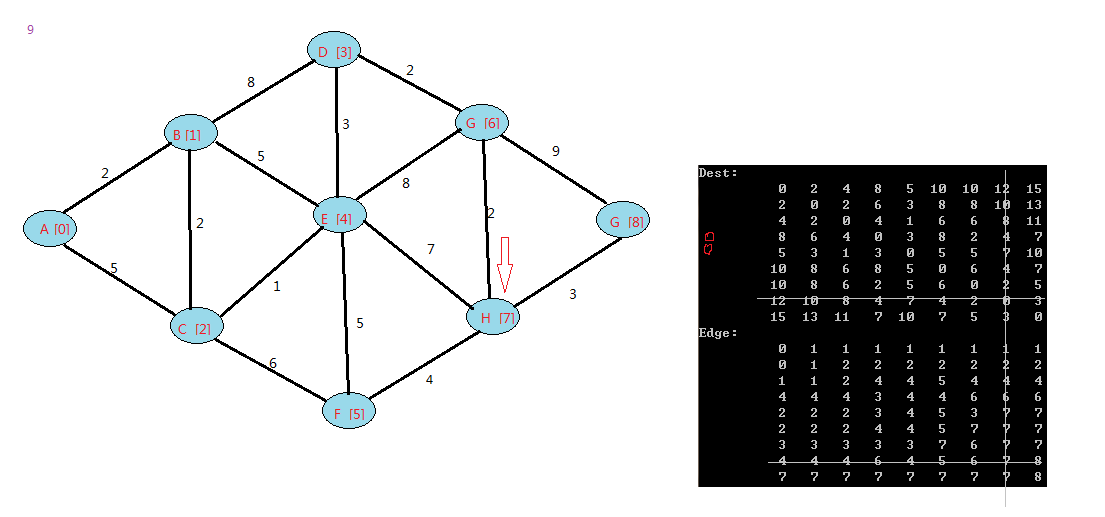
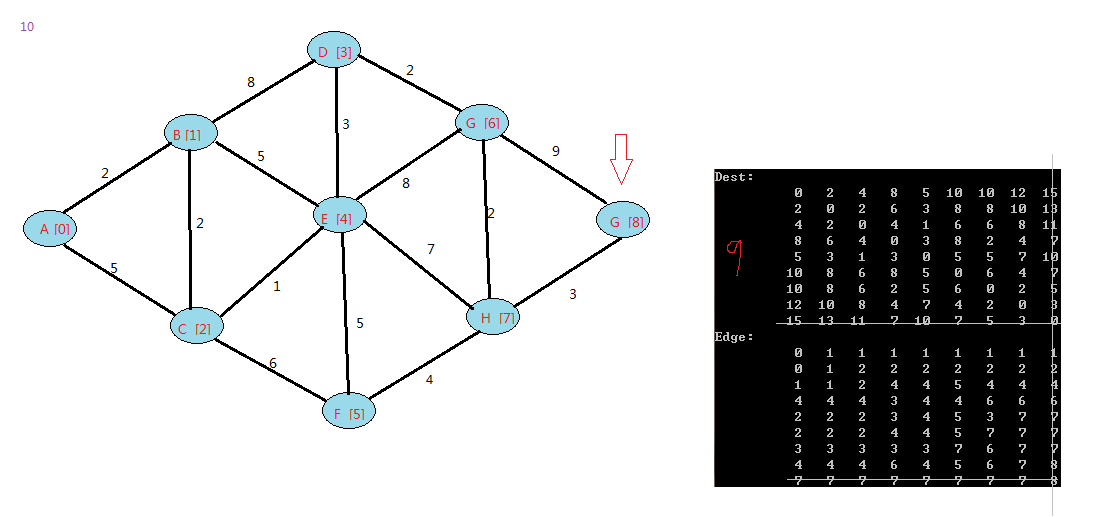
调用后,我给出的结果是一个矩阵形式:
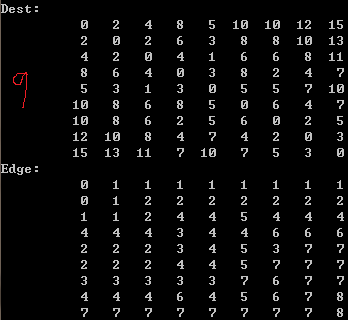
在Dest中,表示v0(A)到其他点的最短距离,和之前的Dijkstra算法对顶点A的结果一致。其他行类推。
在Edge中,由于点初始化的时候,每个点写入的是自己,这样在查看最短路径的时候,这样看
比如查找v0->v8的最小路径,查看第一行(v0)的第八行(v8):显示是1,表示到v8点,需要经过v1,
再查看第二行(v1)到v8的值:2,,表示v1到v8需要经过v2。。。依次类推。
v0到v8的路径为:
v0->1->v2->v4->v7->v8
可以写一个代码来显示最短路径:
void prt_short_path(int vs,int ve,EdgeType *p) { int x = vs; printf(" %c --> ",g_init_vexs[x]); while(x != ve) { x = *(p + MAXVEX*x + ve); printf(" %c --> ",g_init_vexs[x]); } }

完整代码:
// grp-dijkstra.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <stdlib.h> #include <string.h> #define MAXVEX 100 #define IFY 65535 typedef char VertexType; typedef int EdgeType; bool g_visited[MAXVEX]; VertexType g_init_vexs[MAXVEX] = {'A','B','C','D','E','F','G','H','I'}; EdgeType g_init_edges[MAXVEX][MAXVEX] = { {0,2,5,IFY,IFY,IFY,IFY,IFY,IFY}, //'A' {2,0,2,8,5,IFY,IFY,IFY,IFY}, //'B' {5,2,0,IFY,1,6,IFY,IFY,IFY},//'C' {IFY,8,IFY,0,3,IFY,2,IFY,IFY},//'D' {IFY,5,1,3,0,5,8,7,IFY}, //'E' {IFY,IFY,6,IFY,5,0,IFY,4,IFY}, //'F' {IFY,IFY,IFY,2,8,IFY,0,2,9}, //'G' {IFY,IFY,IFY,IFY,7,4,2,0,3}, //'H' {IFY,IFY,IFY,IFY,IFY,IFY,9,3,0}, //'I' }; //静态图-邻接矩阵 typedef struct { VertexType vexs[MAXVEX]; EdgeType Mat[MAXVEX][MAXVEX]; int numVexs,numEdges; }MGraph; //==================================================================== //打印矩阵 void prt_maxtix(EdgeType *p,int vexs) { int i,j; for (i=0;i<vexs;i++) { printf("\t"); for (j=0;j<vexs;j++) { if( (*(p + MAXVEX*i + j)) == IFY) { printf(" $ "); } else { printf(" %2d ", *(p + MAXVEX*i + j)); } } printf("\n"); } } //check the number of vextex int getVexNum(VertexType *vexs) { VertexType *pos = vexs; int cnt=0; while(*pos <= 'Z' && *pos >= 'A') { cnt++; pos++; } return cnt; } bool checkMat(EdgeType *p,VertexType numvex) { int i,j; for (i=0;i<numvex;i++) { for(j=i+1;j<numvex;j++) { //printf("[%d][%d] = %d\t",i,j,*(p + MAXVEX*i + j)); //printf("[%d][%d] = %d\n",j,i,*(p + MAXVEX*j + i)); if (*(p + MAXVEX*i + j) != *(p + MAXVEX*j +i) ) { printf("ERROR:Mat[%d][%d] or Mat[%d][%d] not equal!\n",i,j,j,i); return false; } } } return true; } void init_Grp(MGraph *g,VertexType *v,EdgeType *p) { int i,j; // init vex num (*g).numVexs = getVexNum(v); //init vexter for (i=0;i<(*g).numVexs;i++) { (*g).vexs[i]=*v; v++; } //init Mat for (i=0;i<(*g).numVexs;i++) { for (j=0;j<(*g).numVexs;j++) { (*g).Mat[i][j] = *(p + MAXVEX*i + j); } } if(checkMat(&((*g).Mat[0][0]),(*g).numVexs) == false) { printf("init error!\n"); getchar(); exit(0); } } void init_path(EdgeType *p,int num) { int i,j; for (i=0;i<num;i++) { for (j=0;j<num;j++) { *(p + i*MAXVEX + j) = j; } } } void floyd(MGraph g,EdgeType *des,EdgeType *path) { //初始化 des,path int i,j; for (i=0;i<g.numVexs;i++) { for (j=0;j<g.numVexs;j++) { *(des + i*MAXVEX +j) = g.Mat[i][j]; *(path + i*MAXVEX +j) = j; } } int k; for (k=0;k<g.numVexs;k++) { for (i=0;i<g.numVexs;i++) { for (j=0;j<g.numVexs;j++) { //printf("[%d][%d]---%d [%d][%d]+[%d][%d]---%d\n", i,j,*(des +i*MAXVEX +j),i,k,k,j,g.Mat[i][k] + g.Mat[k][j]); if ( *(des +i*MAXVEX +j) > *(des +i*MAXVEX +k) + *(des + k*MAXVEX + j)) { *( des + i*MAXVEX +j ) = *(des +i*MAXVEX +k) + *(des + k*MAXVEX + j); *( path + i*MAXVEX + j ) = *(path+i*MAXVEX +k); } } } } } void prt_short_path(int vs,int ve,EdgeType *p) { int x = vs; printf(" %c --> ",g_init_vexs[x]); while(x != ve) { x = *(p + MAXVEX*x + ve); printf(" %c --> ",g_init_vexs[x]); } } int _tmain(int argc, _TCHAR* argv[]) { MGraph grp; EdgeType edgeDest[MAXVEX][MAXVEX]; EdgeType edgePath[MAXVEX][MAXVEX]; int i; init_Grp(&grp,g_init_vexs,&g_init_edges[0][0]); prt_maxtix(&grp.Mat[0][0],grp.numVexs); printf("Floyd start!\n"); floyd(grp,&edgeDest[0][0],&edgePath[0][0]); printf("Dest:\n"); prt_maxtix(&edgeDest[0][0],grp.numVexs); printf("Edge:\n"); prt_maxtix(&edgePath[0][0],grp.numVexs); prt_short_path(0,8,&edgePath[0][0]); printf("finish\n"); getchar(); return 0; }