一、学习笔记
-
1.计算机的三大法宝:存储程序计算、函数调用机制、中断。
-
2.堆栈的具体作用有:记录函数调用框架、传递函数参数、保存返回值的地址、提供函数内部局部变量的存储空间等。
-
3.堆栈相关的寄存器:
ESP:堆栈指针(stack pointer)
EBP:基址指针(base pointer),在C语言中用作记录当前函数调用基址。 -
4.对于X86体系结构来讲,堆栈空间是从高地址向低地址增长的,如图所示:
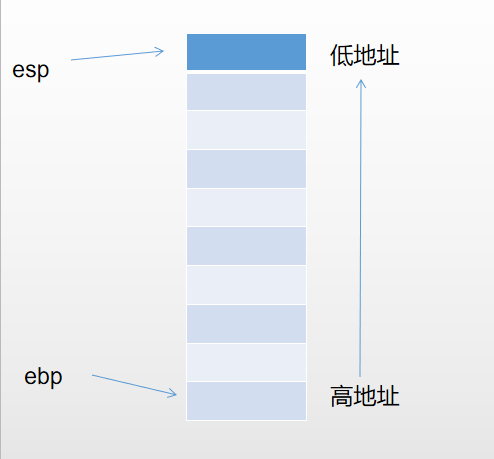
-
5.堆栈操作:
push:栈顶地址减少4个字节(32位),并将操作数放入栈顶存储单元。
pop:栈顶地址增加4个字节(32位),并将栈顶存储单元的内容放入操作数。 -
6.其它一些指令:
顺序执行:总是指向地址连续的下一条指令。
跳转/分支:执行这样的指令时,CS:EIP的值会根据程序需要被修改。
call:将当前CS:EIP 的值压入栈顶,CS:EIP指向被调用函数的入口地址。
ret:从栈顶弹出原来保存在这样的CS:EIP的值,放入CS:EIP中。
二、实验记录
- 1.进程初始化代码,这里需要重点理解的是%1是指后面的“"d"(task[pid].thread.sp)”,%0是指后面的“"c"(task[pid].thread.ip)”,代码如下:
asm volatile(
"movl %1,%%esp
" //将进程原堆栈栈顶的地址(这里是初始化的值)存入ESP寄存器。
"pushl %1
" //将当前EBP寄存器值入栈。
"pushl %0
" //将当前进程的EIP(这里是初始化的值)入栈。
"ret
" //ret命令正好可以让入栈的进程EIP保存到EIP寄存器中。
"popl %%ebp
" //与前面push指令结对出现。
}
- 2.按照庖丁解牛书中所讲
my_timer_handler所控制输出循环次数,可以将代码中的100000改成1000,简化输出结果,代码如下
void my_timer_handler(void)
{
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<
");
my_need_sched = 1;
}
time_count ++ ;
return;
}
- 3.mymain.c是mykernel内核代码的入口,负责初始化内核的各个组成部分。在linux内核源码中,实际的入口是
init/main.c中的__init my_start_kernel(void)函数:
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].thread.sp = (unsigned long)(&task[i].stack[KERNEL_STACK_SIZE-1]);
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp
" /* set task[pid].thread.sp to rsp */
"pushl %1
" /* push rbp */
"pushl %0
" /* push task[pid].thread.ip */
"ret
" /* pop task[pid].thread.ip to rip */
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
int i = 0;
- 4.
myinterrupt.c中,主要是切换进程的my_schedule(void)函数
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<
");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<
",prev->pid,next->pid);
/* switch to next process */
asm volatile(
"pushl %%ebp
" /* save rbp of prev */
"movl %%esp,%0
" /* save rsp of prev */
"movl %2,%%esp
" /* restore rsp of next */
"movl $1f,%1
" /* save rip of prev */
"pushl %3
"
"ret
" /* restore rip of next */
"1: " /* next process start here */
"popl %%ebp
"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
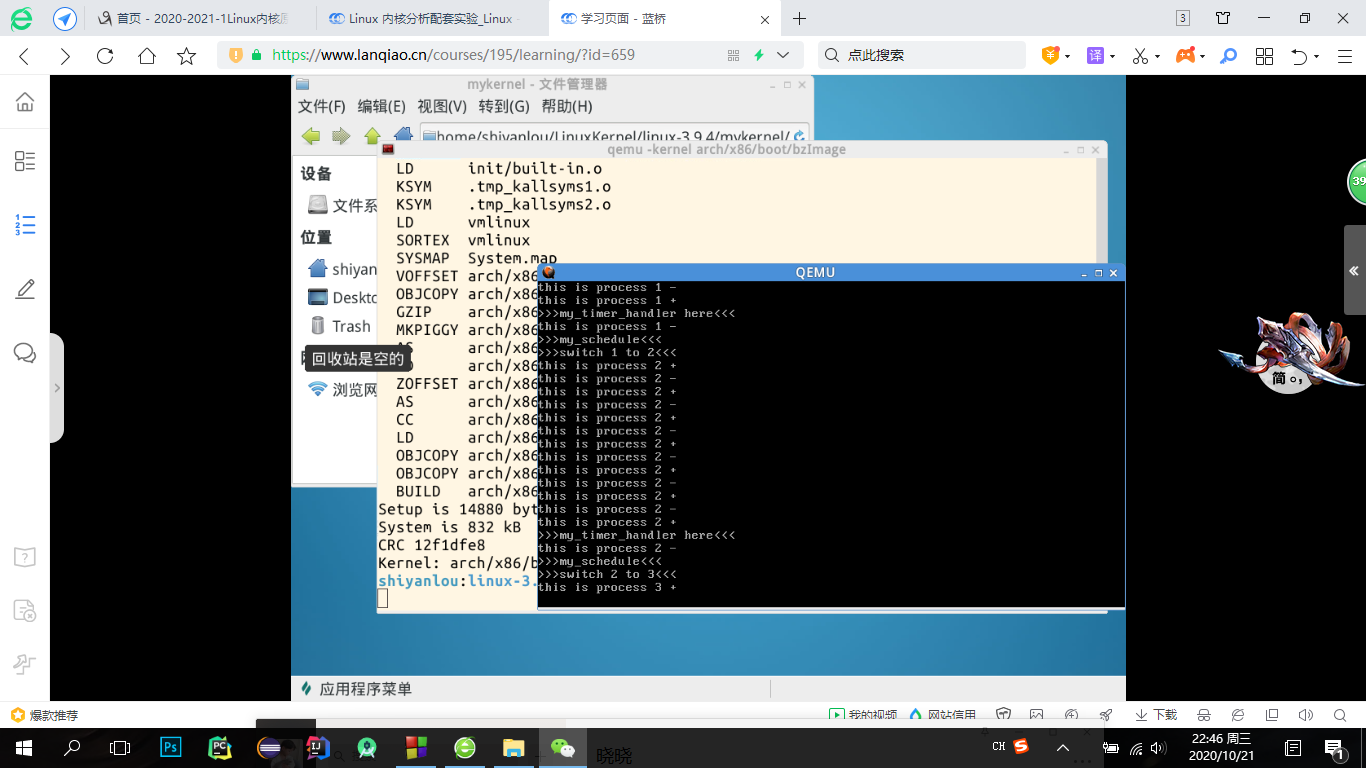
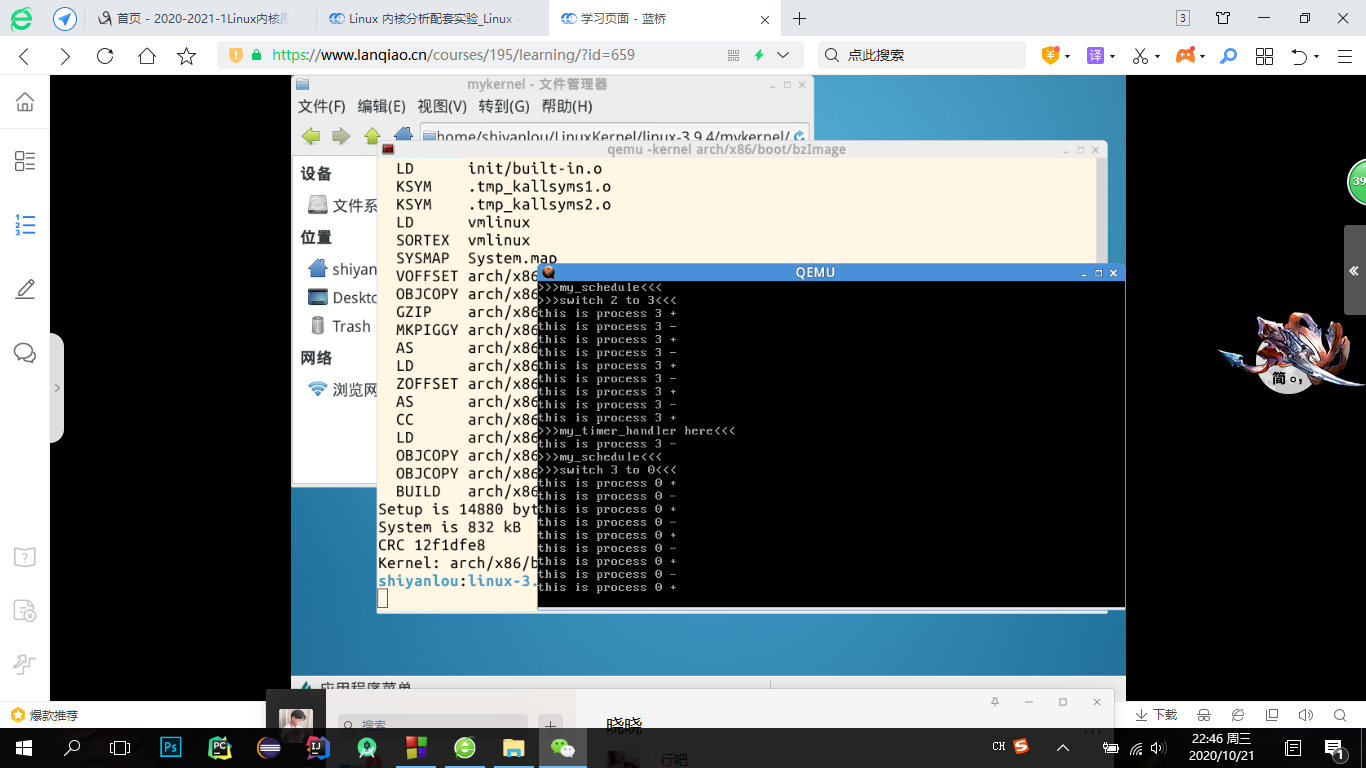
三、实验结果
简化后的输出结果如下图: