在有限域Fp上的非零元素a的逆记为a-1mod p 。即在有限域Fp上存在唯一的一个元素x,使得ax恒等于1(mod p),则元素x为a的逆a-1 。本次设计采用扩展的整数Euclidean算法来求逆元。
扩展的整数Euclidean算法可参考该网站:https://www.cnblogs.com/GjqDream/p/11537934.html
本博文主要介绍verilog实现该算法。
根据模块化的设计思想,设计该模块接口定义如下:
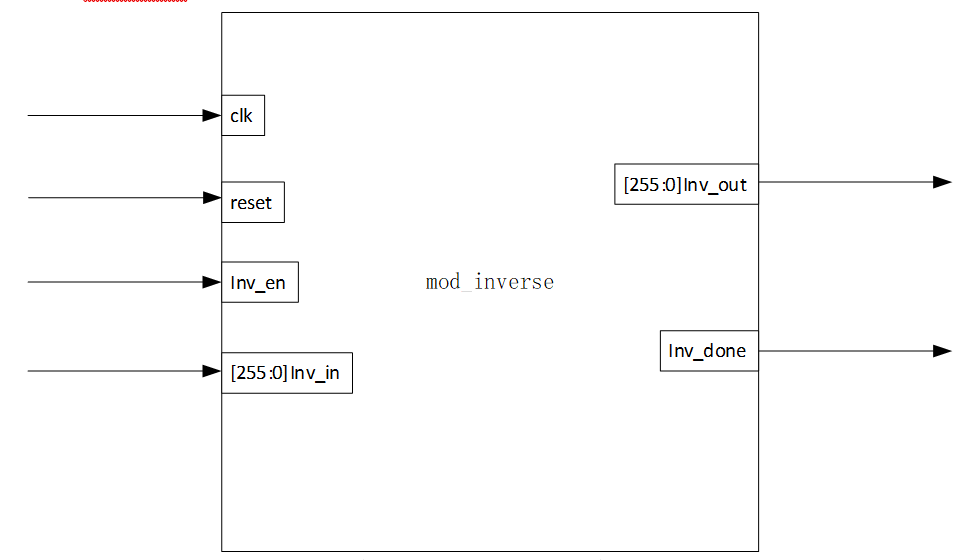
|
信号名 |
方向 |
位宽 |
端口定义 |
|
clk |
Input |
1 |
时钟 |
|
reset |
Input |
1 |
复位 |
|
Inv_en |
Input |
1 |
模逆使能信号 |
|
Inv_in |
Input |
512 |
待求逆信号 |
|
Inv_out |
output |
256 |
模逆结果 |
|
Inv_done |
output |
1 |
模逆完成标识 |
二进制扩展Euclidean算法
输入:模逆使能信号inv_en,整数0<a<p
输出:a-1mod p
- u=a,v=p,A=1,C=0;
- 若 ,重复执行步骤2,否则直接返回C=0
2.1. 若u为偶数,重复执行2.1节
2.1.1. u=u/2。
2.1.2. 若A为偶数,则A=A/2,否则A=(A+P)/2。
2.2. 若v为偶数,重复执行2.2节
2.2.1. v=v/2。
2.2.2. 若C为偶数,则C=C/2;否则C=(C+P)/2。
2.3. 若 ,则u=u-v,A=A-C;否则v=v-u,C=C-A。
3.返回(C mod p)。
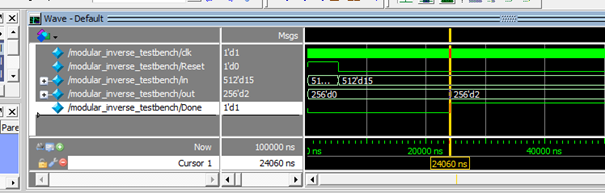
为验证模逆算法正确性,我们选取一个简单的椭圆曲线进行验证,选取的曲线为见以往算法模块,其中a = 4; p = 29
选用输入inv_in = 15,仿真结果为2,15*2=30 mod 29 = 1(mod29),结果正确。
代码如下:
module mod_inv ( input clk, input reset, input mod_inv_en, input mod_inv_end, input [511:0] in, input [255:0] params_p, output [255:0] out, output mod_inv_done ); /*Since Z = 2 for the case of binary polynomials, all divisions can be preformed via a right shift, and all **divisibility checks can be preformed by checking the least signifigant bit. **Since the only elliptic curve operations we have to worry about are point doubling and point adding, we're **not concerned with numbers greater than 2P, which will be limited to 257 bits ** **UPDATE 11/22: Ditched that assumption, now allows inputs up to 512 bits instead of 257 */ //parameter params_p = 256'hFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFEFFFFFC2F; //Control Signals reg u_load, v_load, g1_load, g2_load, count_load; reg [511:0] u_in, v_in, g1_in, g2_in; reg [10:0] count_in; reg mod_inv_done_r; reg [255:0] out_r; wire [511:0] u_out,v_out,g1_out,g2_out; wire [10:0] count_out; //state machine states reg [2:0] state, next_state; parameter Init = 3'd0; parameter Start = 3'd1; parameter Check_u = 3'd2; parameter Check_v = 3'd3; parameter Check_deg = 3'd4; parameter Wait = 3'd5; parameter Finish = 3'd6; //Register Instatntations reg_256 #(512) u(.clk(clk), .load(u_load), .data(u_in), .out(u_out)); reg_256 #(512) v(.clk(clk), .load(v_load), .data(v_in), .out(v_out)); reg_256 #(512) g1(.clk(clk), .load(g1_load), .data(g1_in), .out(g1_out)); reg_256 #(512) g2(.clk(clk), .load(g2_load), .data(g2_in), .out(g2_out)); reg_256 #(11) counter(.clk(clk), .load(count_load), .data(count_in), .out(count_out)); //state machine behavior always@(posedge clk) begin if(reset) state <= Init; else state <= next_state; end //Next state Logic always@(*) begin next_state = state; case(state) Init: if(mod_inv_en && in != 0 ) next_state = Start; else if(mod_inv_en && in == 0 ) next_state = Finish; else next_state = Init; Start: begin if(u_out == 512'b01 || v_out == 512'b01) next_state = Wait; else if(u_out[0] == 0) next_state = Check_u; else if(v_out[0] == 0) next_state = Check_v; else next_state = Check_deg; end Check_u: begin if(u_out[0] == 0) next_state = Check_u; else if(v_out[0] == 0) next_state = Check_v; else next_state = Check_deg; end Check_v: begin if(v_out[0] == 0) next_state = Check_v; else next_state = Check_deg; end Check_deg: next_state = Start; Wait: if(count_out == 11'd470) next_state = Finish; Finish: next_state = mod_inv_end ? Init : Finish; default: next_state = Init; endcase end always@(*) begin //Default values u_in = u_out; v_in = v_out; g1_in = g1_out; g2_in = g2_out; u_load = 1'b0; v_load = 1'b0; g1_load = 1'b0; g2_load = 1'b0; out_r = 256'b0; mod_inv_done_r = 1'b0; count_load = 1'b1; count_in = count_out + 1; //Preform algorithm steps case(state) Init: begin u_in = in; v_in = params_p; mod_inv_done_r = 1'b0; g1_in = 512'b01; g2_in = 512'b0; u_load = 1'b1; v_load = 1'b1; g1_load = 1'b1; g2_load = 1'b1; count_in = 0; end Start:begin end Check_u: begin u_in = u_out>>1; //Divide by z (z=2) if(g1_out[0] == 0) g1_in = g1_out>>1; else g1_in = (g1_out + params_p)>>1; if(u_out != 512'b01 && u_out[0] == 0) begin u_load = 1'b1; g1_load = 1'b1; end end Check_v: begin v_in = v_out>>1; if(g2_out[0] == 0) g2_in = g2_out>>1; else g2_in = (g2_out + params_p)>>1; if(v_out != 512'b01 && v_out[0] == 0) begin v_load = 1'b1; g2_load = 1'b1; end end Check_deg: begin //Checks if deg(u) > deg(v) if(u_out > v_out && u_out >= ((v_out<<1) - v_out)) begin u_in = u_out + v_out; g1_in = g1_out + g2_out; u_load = 1'b1; g1_load = 1'b1; end else begin v_in = v_out + u_out; g2_in = g2_out + g1_out; v_load = 1'b1; g2_load = 1'b1; end end Wait: if(count_out != 11'd470) count_in = count_out + 1; Finish: begin mod_inv_done_r = 1'b1; if(in == 0) out_r = 0; else if(u_out == 512'b01 && in != 0) out_r = g1_out[255:0]; else if(u_out != 512'b01 && in != 0) out_r = g2_out[255:0]; else out_r = g2_out[255:0]; end default: begin end endcase end assign out = (state==Finish)? out_r : 0; assign mod_inv_done = (state==Finish)? mod_inv_done_r : 0; endmodule