1 卡尔曼滤波的融合框架和流程
以无人驾驶的汽车检测路上的运动的自行车为例
传感器是激光雷达和多普勒雷达
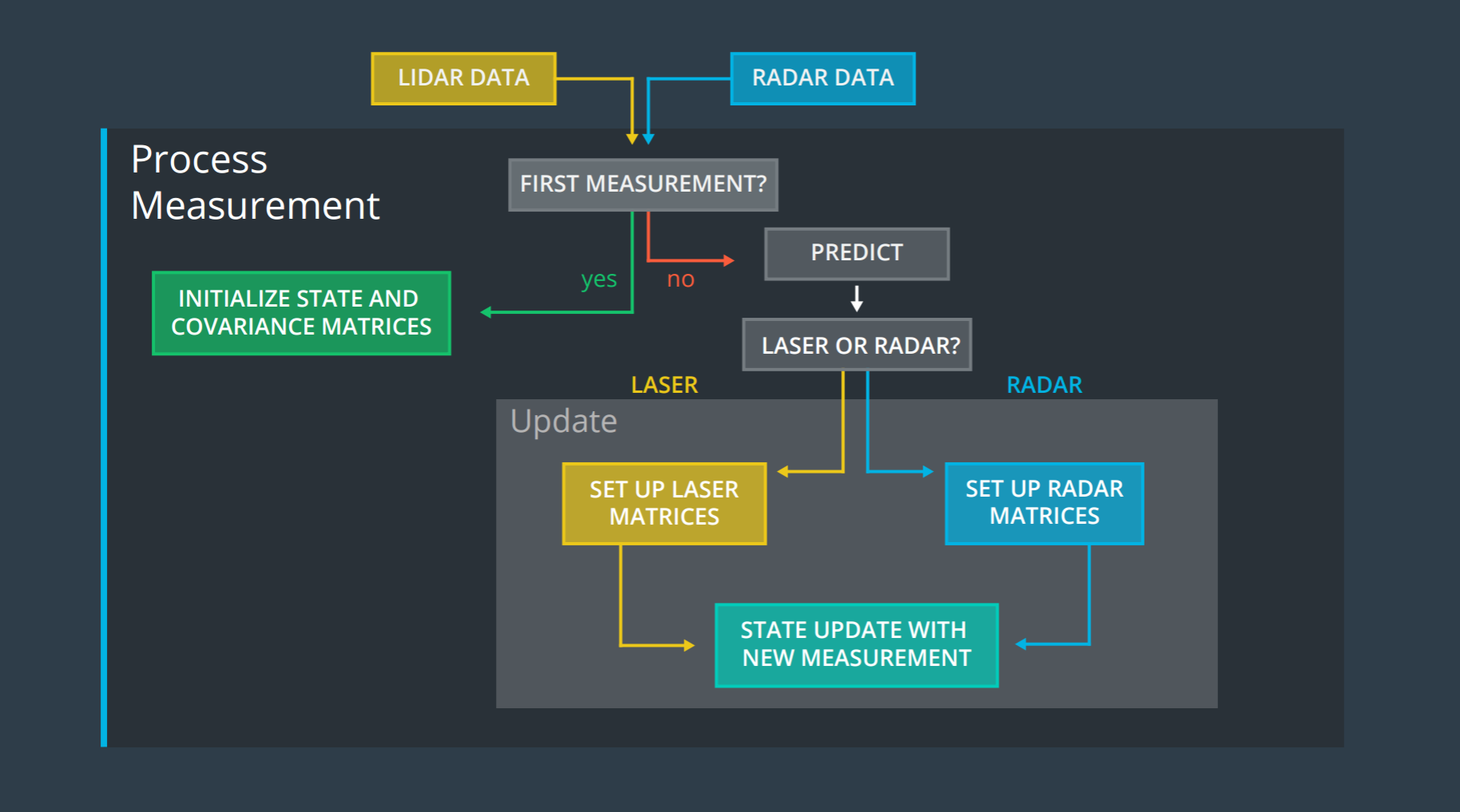
卡尔曼滤波器算法执行步骤:
- 首次测量
滤波器在 T 时刻接收来自雷达或激光雷达的自行车在汽车坐标中的位姿和速度作为初始测量。 - 初始化 状态和协方差矩阵
滤波器将基于第一次测量来初始化自行车的位置。 - 滤波器在时间段 Δt 之后收到新的传感器测量值。
- 预测更新 Predict Update
预测自行车在在时间 T+Δt 时的位姿。
预测自行车位置的一种简单方法是假设自行车的速度是恒定的。
就可以估计自行车的位置更新是 (Δt ×速度)。 - 测量更新 Update
滤波器将预测的位置与传感器的实际测量值进行比较。
将预测的位置和测量的位置合并以给出更新的位置。
卡尔曼滤波器将根据每个值的不确定性,分配不同的权重在预测的位置或测量的位置上。 - 迭代
滤波器将在 Δt 之后收到新的传感器测量值。然后,该算法执行另一个预测和更新步骤。