STM32的USART组件支持异步、同步、单线半双工、多处理器、IrDA、LIN、SmartCard等模式,本文介绍的是异步即UART模式。
总线通信有三种模型:轮询、中断和DMA。DMA对我来说是陌生的内容,以后单独开篇细讲。
HAL
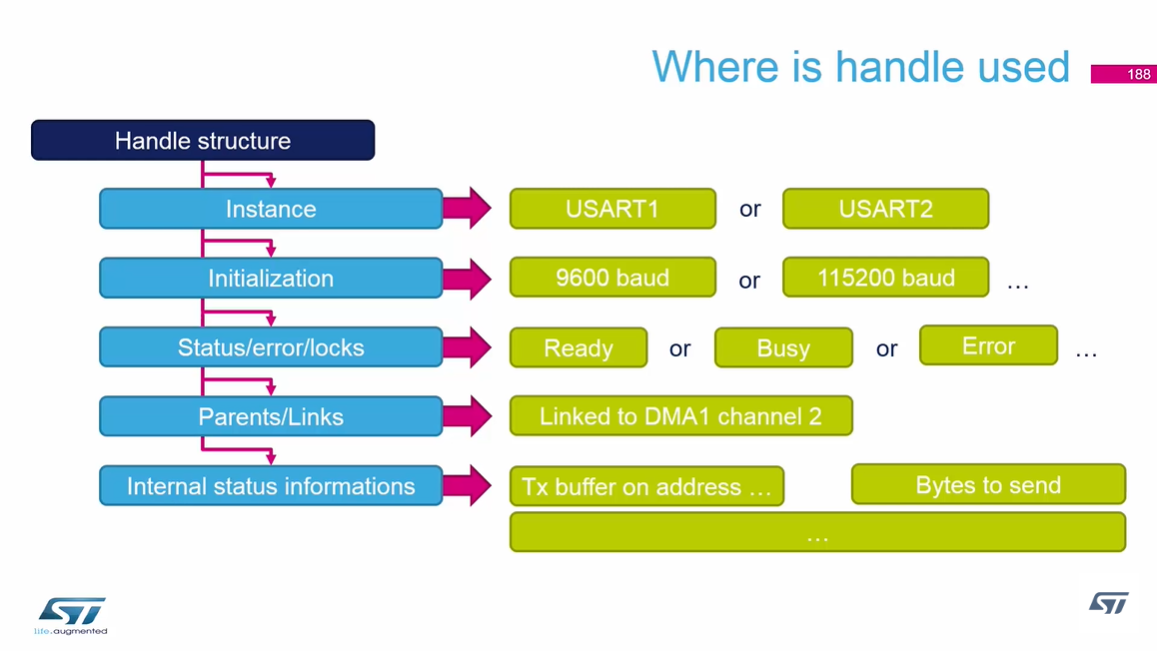
HAL把寄存器组组织成组件,组件包含外设的各个寄存器。在USART这里,寄存器不足以描述外设的所有状态,HAL用handle来包装组件。一个handle包含指向组件的指针、初始化参数、状态、与其他组件的链接(如DMA)和内部状态等。
图源ST官方MOOC,打开之前注意调低音量。
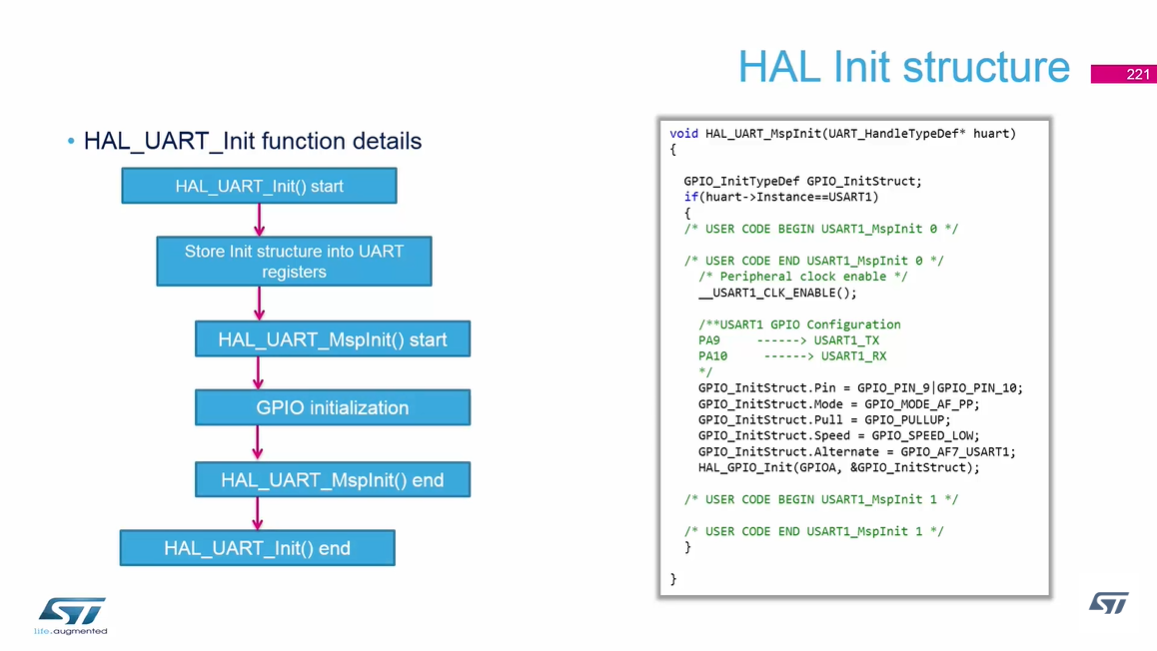
USART的初始化除了USART本身的寄存器以外,还要设置GPIO的复用功能,这两项任务分别在stm32f4xx_hal_uart.c中的HAL_UART_Init和stm32f4xx_hal_msp.c的HAL_UART_MspInit中完成(MSP意为“MCU Specific Package”)。stm32f4xx_hal_uart.c中也定义了HAL_UART_MspInit,添加了weak属性(提供实现,允许被覆写)。
轮询
轮询是与中断相对的。对于发送,轮询是指写一个字节(或一个packet),等待它发送完,再写下一个字节,直到所有数据被发送完才返回;对于接受,轮询是指等待直到接收到一定长度的数据。轮询相对简单,但是效率很低。

#include "main.h"
#include <string.h>
UART_HandleTypeDef huart1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
void uart_transmit(const char* string);
int main(void)
{
char buffer[2] = {0};
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
uart_transmit("hello
");
while (1)
{
HAL_StatusTypeDef status = HAL_UART_Receive(&huart1, buffer, 1, 1000);
if (status == HAL_OK)
{
uart_transmit("received: ");
uart_transmit(buffer);
uart_transmit("
");
}
else
uart_transmit("timeout
");
}
}
void uart_transmit(const char* string)
{
HAL_UART_Transmit(&huart1, string, strlen(string), 1000);
}
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
// ...
HAL的UART接收只能指定数据长度而不能指定终止符。在轮询模式下,可以设置数据长度为1,即每次读取一个字节,判断它是否为终止符。
中断
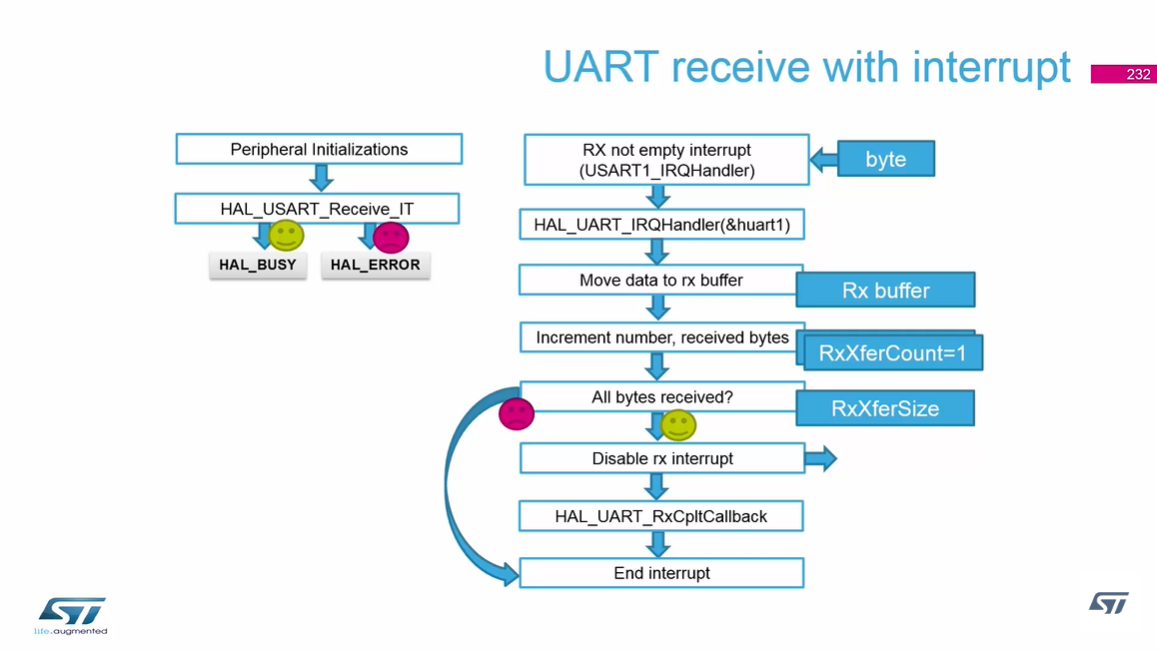
在中断模式下,函数立即返回,数据在中断中发送或接收。在发送或接收完成后,相应的回调函数会被调用。
#include "main.h"
#include <stdbool.h>
UART_HandleTypeDef huart1;
volatile bool finished = false;
char buffer[3] = {0};
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
void uart_transmit(const char* string);
void uart_transmit_it(const char* string);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
uart_transmit_it("hello
");
const char* info = finished ? "already finished
" : "still transmitting
";
while (!finished)
;
finished = false;
uart_transmit_it(info);
uart_transmit_it(info);
while (!finished)
;
while (1)
{
finished = false;
HAL_UART_Receive_IT(&huart1, buffer, 2);
while (!finished)
;
uart_transmit("received: ");
uart_transmit(buffer);
uart_transmit("
");
}
}
void uart_transmit(const char* string)
{
HAL_UART_Transmit(&huart1, string, strlen(string), 1000);
}
void uart_transmit_it(const char* string)
{
HAL_UART_Transmit_IT(&huart1, string, strlen(string));
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1)
{
finished = true;
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1)
{
finished = true;
}
}
// ...
串口输出still transmitting,说明HAL_UART_Transmit_IT确实是发送完成前就返回的;still transmitting只出现一次,因为第二次调用时第一次的发送还没结束。
读了HAL的源码,我发现中断发送的数据是拷贝指针的,也就是浅拷贝的,需要保证发送期间该地址上的数据有效。比如,如果一个函数把局部变量数组作为参数传给HAL_UART_Transmit_IT,未等待发送完成便返回,那么发送的数据将会是错误的,甚至导致程序行为未定义。
如果给单片机发送了多余所需量的数据,程序会崩溃,我没有debug出问题在哪。
缓冲区
这样的接收连差强人意都算不上,我的终极目标是实现scanf那样的接收函数。中断发送只能缓冲一次和浅拷贝等问题也相当愚蠢,我想顺便把发送也改造成printf。改造的工具是用循环队列实现的缓冲区,这个我在AVR单片机教程中还煞有其事地写过,正好可以作为现在的练习。
queue.h:
#ifndef QUEUE_H
#define QUEUE_H
#include <stdint.h>
#include <stdbool.h>
#include <stdlib.h>
#ifdef __cplusplus
extern "C"
{
#endif
typedef struct
{
uint16_t mask;
uint16_t head;
uint16_t tail;
queue_element_t data[0];
} queue_t;
static inline queue_t* queue_create(uint16_t _size)
{
if (_size & (_size - 1))
_size = 256;
queue_t* q = malloc(sizeof(queue_t) + _size * sizeof(queue_element_t));
if (q)
{
q->mask = _size - 1;
q->head = q->tail = 0;
}
return q;
}
static inline bool queue_empty(const volatile queue_t* _queue)
{
return _queue->head == _queue->tail;
}
static inline bool queue_full(const volatile queue_t* _queue)
{
return ((_queue->tail + 1) & _queue->mask) == _queue->head;
}
static inline uint16_t queue_size(const volatile queue_t* _queue)
{
return (_queue->tail - _queue->head) & _queue->mask;
}
static inline uint16_t queue_capacity(const volatile queue_t* _queue)
{
return _queue->mask;
}
static inline queue_element_t queue_peek(const volatile queue_t* _queue)
{
return _queue->data[_queue->head];
}
static inline void queue_push(volatile queue_t* _queue, const queue_element_t _ele)
{
_queue->data[_queue->tail] = _ele;
_queue->tail = (_queue->tail + 1) & _queue->mask;
}
static inline void queue_pop(volatile queue_t* _queue)
{
_queue->head = (_queue->head + 1) & _queue->mask;
}
#ifdef __cplusplus
}
#endif
#endif
写inline遇到了点问题,原来C和C++中的inline是不一样的!改成static inline就好了。有空再去深究这个问题。
main.c:
#include "main.h"
#include <string.h>
#include "cmsis_gcc.h"
typedef char queue_element_t;
#include "queue.h"
UART_HandleTypeDef huart1;
queue_t* tx_buffer;
queue_t* rx_buffer;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void usart1_init_0();
static void usart1_init_2();
static void usart1_transmit(const char* string);
static void usart1_receive(char* dest, char delim);
int main(void)
{
char buffer[80];
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
usart1_transmit("hello
");
while (1)
{
usart1_receive(buffer, '
');
usart1_transmit("received: ");
usart1_transmit(buffer);
usart1_transmit("
");
}
}
void usart1_init_0()
{
tx_buffer = queue_create(1024);
rx_buffer = queue_create(1024);
}
void usart1_init_2()
{
USART1->CR1 |= USART_CR1_RXNEIE & UART_IT_MASK;
}
void usart1_transmit(const char* string)
{
uint16_t capacity = queue_capacity(tx_buffer);
uint16_t size = strlen(string);
bool ok = false;
while (1)
{
__disable_irq();
ok = capacity - queue_size(tx_buffer) >= size;
if (ok)
break;
__enable_irq();
__NOP();
}
for (uint16_t i = 0; i != size; ++i)
queue_push(tx_buffer, string[i]);
USART1->CR1 |= USART_CR1_TXEIE & UART_IT_MASK;
__enable_irq();
}
void usart1_receive(char* dest, char delim)
{
while (1)
{
bool ok = false;
while (1)
{
__disable_irq();
ok = !queue_empty(rx_buffer);
if (ok)
break;
__enable_irq();
__NOP();
}
char c = queue_peek(rx_buffer);
queue_pop(rx_buffer);
__enable_irq();
if (c == delim)
break;
*dest++ = c;
}
*dest = '�';
}
void usart1_transmit_handler()
{
USART1->DR = queue_peek(tx_buffer);
queue_pop(tx_buffer);
if (queue_empty(tx_buffer))
USART1->CR1 &= ~USART_CR1_TXEIE & UART_IT_MASK;
}
void usart1_receive_handler()
{
queue_push(rx_buffer, USART1->DR);
}
void USART1_IRQHandler(void)
{
uint32_t isrflags = USART1->SR;
uint32_t cr1its = USART1->CR1;
uint32_t errorflags = 0x00U;
errorflags = (isrflags & (uint32_t)(USART_SR_PE | USART_SR_FE | USART_SR_ORE | USART_SR_NE));
if (errorflags == RESET)
{
if (((isrflags & USART_SR_RXNE) != RESET) && ((cr1its & USART_CR1_RXNEIE) != RESET))
{
usart1_receive_handler();
return;
}
if (((isrflags & USART_SR_TXE) != RESET) && ((cr1its & USART_CR1_TXEIE) != RESET))
{
usart1_transmit_handler();
return;
}
}
HAL_UART_IRQHandler(&huart1);
}
static void MX_USART1_UART_Init(void)
{
usart1_init_0();
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
usart1_init_2();
}
中断的调用流程是:USART1中断请求调用USART1_IRQHandler(这个名字在startup_stm32f407vetx.s中定义),由STM32CubeMX生成的USART1_IRQHandler调用HAL_UART_IRQHandler,里面进行各种判断和处理,在合适的时机调用HAL_UART_TxCpltCallback等。我在USART1_IRQHandler中插入了一些代码,把TXE和RXNE两种中断拦截了下来,其余还是丢给HAL_UART_IRQHandler处理(Chain of Responsibility设计模式?)。
queue上的操作不是原子的,主函数与中断共享需要加锁。__disable_irq关闭全局中断,__enable_irq开启全局中断。ARM说在开中断之后Cortex-M3/4还可能执行2条指令才响应中断,而在汇编代码中cpsie后第二句就是cpsid,所以我在__enable_irq后加一句__NOP空指令,以保证中断请求能被响应。
离printf和scanf只有一步之遥了,但我想把它放到下一篇。20pin的ST-LINK/V2已经在路上了。