单片机型号STM32F407VET6。
概述
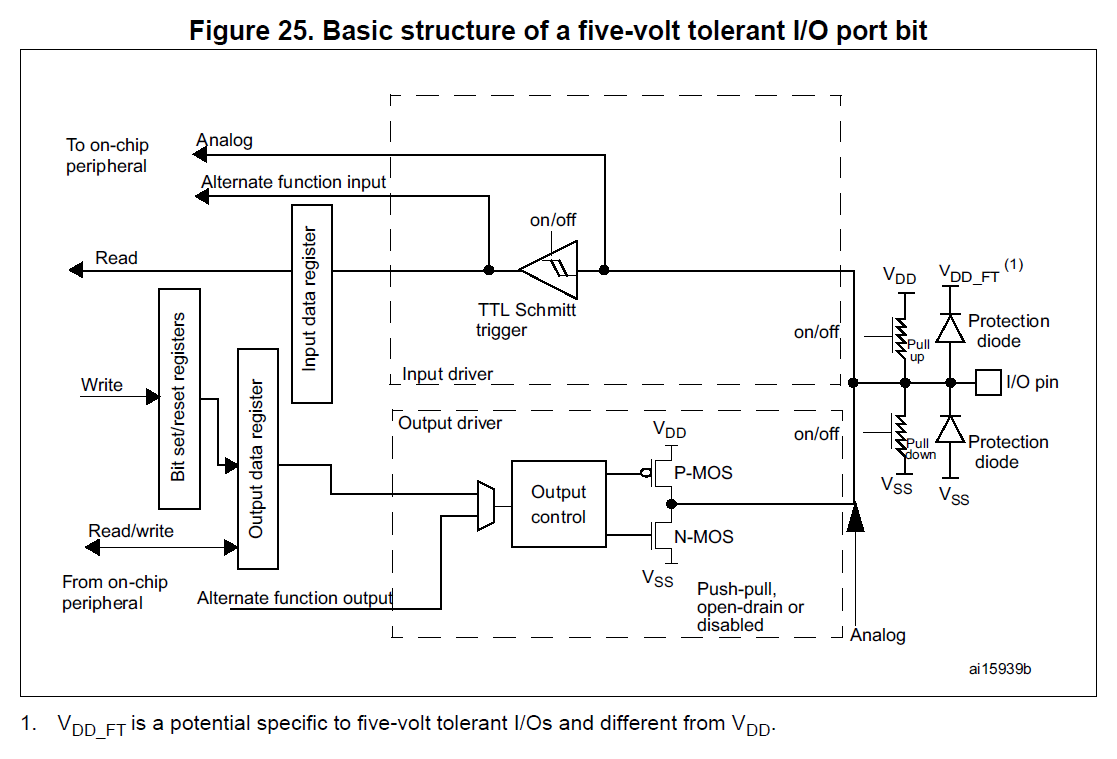
GPIO的分类:
-
可接受5V输入的(FT),绝大多数引脚都是;
-
只能接受3.3V输入的(TTa),只有
PA4和PA5,就是DAC输出的两个引脚; -
其他,包括
BOOT0和NRST这两个特殊功能的引脚。
GPIO不仅可以用作GPIO,每个GPIO都有复用功能(alternate function,AF)和附加功能(additional function),AF用GPIOx_AFR来配置,附加功能用外设中的寄存器。
一组GPIO为16个,从Px0到Px15,x为A到I,有些封装上有些引脚不存在。
GPIO的功能主要有4类:
-
输出,推挽(push-pull,PP)或开漏(open-drain,OD),可选上拉(pull-up,PU)或下拉(pull-down,PD),4档速度;
-
AF,细节同上;
-
输入,可选上拉或下拉;
-
模拟,用于ADC和DAC。
HAL
HAL把外部中断也归到了GPIO中,这里暂且不涉及外部中断。
初始化这种事情我都交给STM32CubeMX来完成(STM32CubeIDE内置)。我已经初步领略到HAL的设计思想,以后专门开一篇写。
GPIO有以下函数:
-
HAL_GPIO_Init():初始化一组GPIO中的一个或多个; -
HAL_GPIO_DeInit():把一组GPIO中的一个或多个还原为复位状态; -
HAL_GPIO_ReadPin():读引脚电平,返回GPIO_PinState枚举类型,可能值为GPIO_PIN_RESET = 0和GPIO_PIN_SET = 1; -
HAL_GPIO_WritePin():写引脚电平,是原子操作,允许中断发生; -
HAL_GPIO_TogglePin():翻转引脚电平; -
HAL_GPIO_LockPin():锁定引脚配置,在复位前不可修改,引脚电平还可以写。
#include "main.h"
#include <stdbool.h>
int main(void)
{
bool prev = true;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
while (1)
{
if (HAL_GPIO_ReadPin(KEY0_GPIO_Port, KEY0_Pin) == GPIO_PIN_RESET)
HAL_GPIO_WritePin(LED0_GPIO_Port, LED0_Pin, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(LED0_GPIO_Port, LED0_Pin, GPIO_PIN_SET);
bool now = HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_RESET;
if (!prev && now)
HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);
prev = now;
HAL_Delay(1);
}
}
(STM32CubeMX生成的代码是两格缩进的,这让我非常不爽!)
LED0和LED1分别连接到PA6和PA7,低电平亮;KEY0和KEY1分别连接到PE4和PE3,上拉。程序的功能为:KEY0按下时LED0亮,松开熄灭;KEY1按下时切换LED1的亮暗状态。
寄存器
每一组GPIO都有10个寄存器:
-
GPIOx_MODER,32位,2位MODERy[1:0]一组(y为0到15,下同),设置GPIO模式; -
GPIOx_OTYPER,16位,1位OTy一组,设置GPIO输出类型; -
GPIOx_OSPEEDR,32位OSPEEDRy[1:0],设置GPIO输出速度; -
GPIOx_PUPDR,32位PUPDRy[1:0],设置上拉下拉; -
GPIOx_IDR,16位IDRy,读取输入电平; -
GPIOx_ODR,16位ODRy,设置输出电平; -
GPIOx_BSRR,低16位BSy,写1把GPIOx_ODR中对应位置1;高16位BRy,写1把GPIOx_ODR中对应位清0;同时写1时BSy优先; -
GPIOx_LCKR:低16为LCKy,第16位LCKK,需要一个特定的写入过程(参考datasheet或HAL_GPIO_LockPin实现),可以锁定GPIOx_MODER、GPIOx_OTYPER、GPIOx_OSPEEDR、GPIOx_PUPDR、GPIOx_AFRL、GPIOx_AFRH这6个控制寄存器中的对应位; -
GPIOx_AFRL和GPIOx_AFRH,4位AFRHy[3:0]为一组,设置复用输出。

GPIO的输出级有一个NMOS和一个PMOS:
-
在推挽输出模式下,
ODRx为0,NMOS导通;ODRx为1,PMOS导通; -
在开漏输出模式下,
ODRx为0,NMOS导通;ODRx为1,高阻态;PMOS都不会导通。
开漏输出的应用有矩阵键盘和I²C等,需要上拉电阻,通常用内置的即可。
用寄存器重写上面的程序:
#include "main.h"
#include <stdbool.h>
#define LED0_Bit 6
#define LED1_Bit 7
#define KEY0_Bit 4
#define KEY1_Bit 3
int main(void)
{
bool prev = true;
HAL_Init();
SystemClock_Config();
__HAL_RCC_GPIOA_CLK_ENABLE();
LED0_GPIO_Port->ODR |= 1 << LED0_Bit;
LED0_GPIO_Port->MODER |= 0b01 << (LED0_Bit * 2);
LED1_GPIO_Port->ODR |= 1 << LED1_Bit;
LED1_GPIO_Port->MODER |= 0b01 << (LED1_Bit * 2);
__HAL_RCC_GPIOE_CLK_ENABLE();
KEY0_GPIO_Port->PUPDR |= 0b01 << (KEY0_Bit * 2);
KEY1_GPIO_Port->PUPDR |= 0b01 << (KEY1_Bit * 2);
while (1)
{
if (!(KEY0_GPIO_Port->IDR & 1 << KEY0_Bit))
LED0_GPIO_Port->BSRR = 1 << (16 + LED0_Bit);
else
LED0_GPIO_Port->BSRR = 1 << LED0_Bit;
bool now = !(KEY1_GPIO_Port->IDR & 1 << KEY1_Bit);
if (!prev && now)
LED1_GPIO_Port->ODR ^= 1 << LED1_Bit;
prev = now;
HAL_Delay(1);
}
}
只把GPIO相关的改成了寄存器操作,时钟之类的还是用的HAL。