原文地址:https://www.cnblogs.com/jacklu/p/9853599.html
本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解。其中Yolov3速度非常快,效果也还可以,但在github上还没有完整的基于pytorch的yolov3代码,目前star最多的pytorch yolov3项目只能做预测,没有训练代码,而且我看了它的model写得不是很有层次。自己准备利用接下来的几个周末把这个坑填上。
希望能够帮助开发者了解如何基于Pytorch实现一个强大的目标检测模型,同时可以方便的将模型应用到自己的数据集里。完整的源代码准备在文章结束后考虑发布在github上。
准备的目录:
目标检测-基于Pytorch实现Yolov3(1)- 搭建模型 (model.py,最容易的部分,所以第一篇写这个)
目标检测-基于Pytorch实现Yolov3(2)- 数据预处理及数据加载 (dataloader.py,非常重要的一部分,代码工作量最大,定制化只要在这一部分下功夫)
目标检测-基于Pytorch实现Yolov3(3)- 目标函数 (loss.py,最重要的部分,直接决定了网络的效果,难度也是5部分里最大的)
目标检测-基于Pytorch实现Yolov3(4)- 模型训练 (train.py,前面重要的3部分都做完了,这部分就是写完代码喝茶看曲线的时间)
目标检测-基于Pytorch实现Yolov3(5)- 模型预测 (test.py,检验模型训练好坏,还有一些坑要填)
代码主要参考github上基于keras的yolov3的实现,代码结构非常清晰。
Darknet卷积模块
Yolo系列的作者把yolo网络叫做Darknet,其实其他神经网络库都已经把卷积层写好了,直接堆叠起来即可。
darknet卷积模块是这个模型里最基本的网络单元,包括卷积层、batch norm(BN)层、激活函数,因此类型命名为 DarknetConv2D_BN_Leaky。原keras实现是卷积层加了L2正则化预防过拟合,Pytorch是把这个操作放到了Optimizer中,所以将在第三部分讲解。
用Pytorch需要注意, 如果你训练的时候GPU显存不大,batch size设的很小,这时候你就要考虑训练数据集的分布情况。举个例子,加入你的batch size设成了1,但你数据每张图差别都很大,这会导致你的网络一直在震荡,即使网络能够训练到很低的training loss,
在做预测的时候效果也不好,这主要是BN造成的。因为每批数据的统计量(均值和方差)都不同,而且差别大,这就导致网络训练学不到好的BN层的统计量。如果直接去掉BN层,你会发现网络训练非常慢,所以BN层还是要加的,好在Pytorch里的BN有个接口来控制要不要记住每批训练的统计量,即track_running_stats=True,如果训练的batch size不能设特别大,就把它改成False。
卷积层、BN层说完了,激活函数Yolo里用的是0.1的LeakReLU,本人实验发现和ReLU没什么明显的区别(水论文真是一门艺术,我的水文怎么就不中嘞?)
结构很简答,这部分直接上代码,不画图了。
import torch.nn as nn import torch class DarknetConv2D_BN_Leaky(nn.Module): def __init__(self, numIn, numOut, ksize, stride = 1, padding = 1): super(DarknetConv2D_BN_Leaky, self).__init__() self.conv1 = nn.Conv2d(numIn, numOut, ksize, stride, padding)#regularizer': l2(5e-4) self.bn1 = nn.BatchNorm2d(numOut) self.leakyReLU = nn.LeakyReLU(0.1) def forward(self, x): x = self.conv1(x) x = self.bn1(x) x = self.leakyReLU(x) return x
残差模块
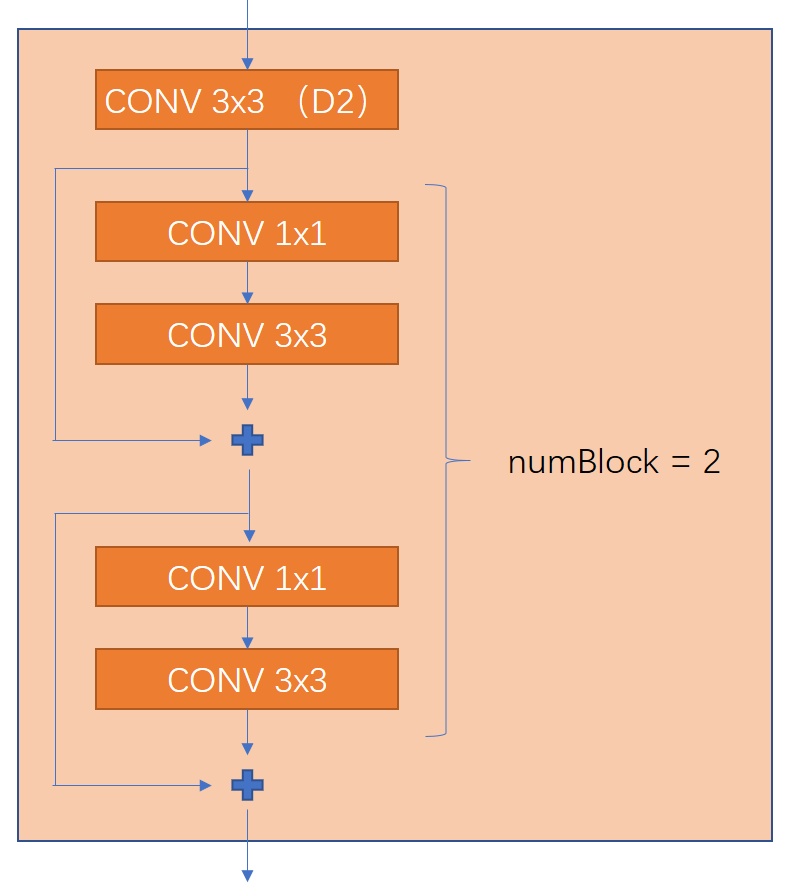
残差模块是借鉴了ResNet,残差模块是为了保证深的模型能够得到很好的训练。残差模块ResidualBlock,对外接口有numIn, numOut, numBlock,分别控制模块的输入通道数,输出通道数(卷积核数)和残差模块的堆叠次数。下图是一个numBlock = 2 的模型,注意这里CONV是指上一部分说的Darknet卷积模块,第一个模块(D2)表示是这个卷积模块stride = 2,及顺便执行了2倍降采样操作。也就是说特征每经过一个残差模块,分辨率降为原来的一半。
class ResidualBlock(nn.Module): def __init__(self, numIn, numOut, numBlock): super(ResidualBlock, self).__init__() self.numBlock = numBlock self.dark_conv1 = DarknetConv2D_BN_Leaky(numIn, numOut, ksize = 3, stride = 2, padding = 1) self.dark_conv2 = [] for i in range(self.numBlock): layers = [] layers.append(DarknetConv2D_BN_Leaky(numOut, numOut//2, ksize = 1, stride = 1, padding = 0)) layers.append(DarknetConv2D_BN_Leaky(numOut//2, numOut, ksize = 3, stride = 1, padding = 1)) self.dark_conv2.append(nn.Sequential(*layers)) self.dark_conv2 = nn.ModuleList(self.dark_conv2) def forward(self, x): x = self.dark_conv1(x) for convblock in self.dark_conv2: residual = x x = self.convblock(x) x = x + residual return x
后端输出模块
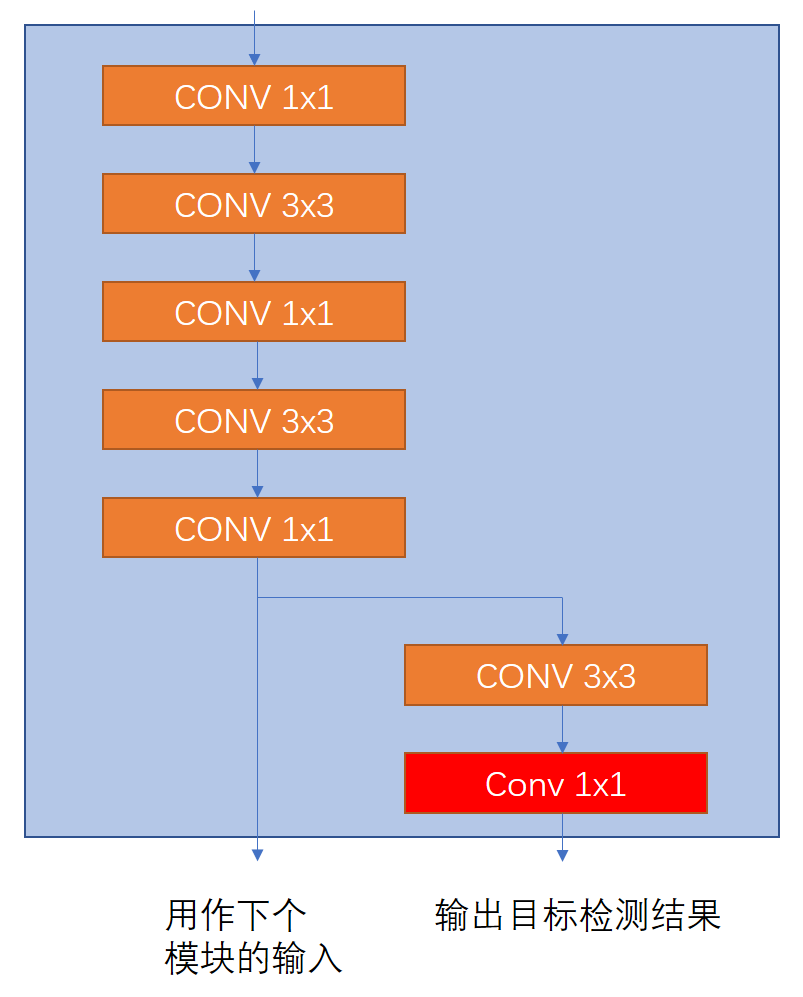
后端输出模块是一个三次降采样(三次升采样在下一部分介绍),这三次降采样+三次升采样,类似Encoder-Decoder的FCN模型。是为了在三种不同尺度上预测。本系列将在voc2007上训练,训练前输入图片要resize到256x256,那么这三种尺度分别是32x32,16x16,8x8。这一部分是因为图片中的目标有大有小,为了保证从不同尺度上找到最好尺度的特征图来进行预测。当然准确提升的同时,由于分辨率有提升,计算量又有一定的增加,索性我们这里的分辨率不大。下图所示为最后输出模块,这个模块有两个输出,一个是用作下一个模块的输入,一个是用于输出目标检测结果,即坐标、类别和目标置信度,这一部分将在下一篇详细介绍。注意红色的Conv不是DarknetConv2D_BN_Leaky,而是指普通的卷积模块。
class LastLayer(nn.Module): def __init__(self, numIn, numOut, numOut2): super(LastLayer, self).__init__() self.dark_conv1 = DarknetConv2D_BN_Leaky(numIn, numOut, ksize = 1, stride = 1, padding = 0) self.dark_conv2 = DarknetConv2D_BN_Leaky(numOut, numOut*2, ksize = 3, stride = 1, padding = 1) self.dark_conv3 = DarknetConv2D_BN_Leaky(numOut*2, numOut, ksize = 1, stride = 1, padding = 0) self.dark_conv4 = DarknetConv2D_BN_Leaky(numOut, numOut*2, ksize = 3, stride = 1, padding = 1) self.dark_conv5 = DarknetConv2D_BN_Leaky(numOut*2, numOut, ksize = 1, stride = 1, padding = 0) self.dark_conv6 = DarknetConv2D_BN_Leaky(numOut, numOut*2, ksize = 3, stride = 1, padding = 1) self.conv7 = nn.Conv2d(numOut*2, numOut2, 1, stride = 1, padding = 0) def forward(self, x): x = self.dark_conv1(x) x = self.dark_conv2(x) x = self.dark_conv3(x) x = self.dark_conv4(x) x = self.dark_conv5(x) y = self.dark_conv6(x) y = self.conv7(y) return x,y
Yolov3模型
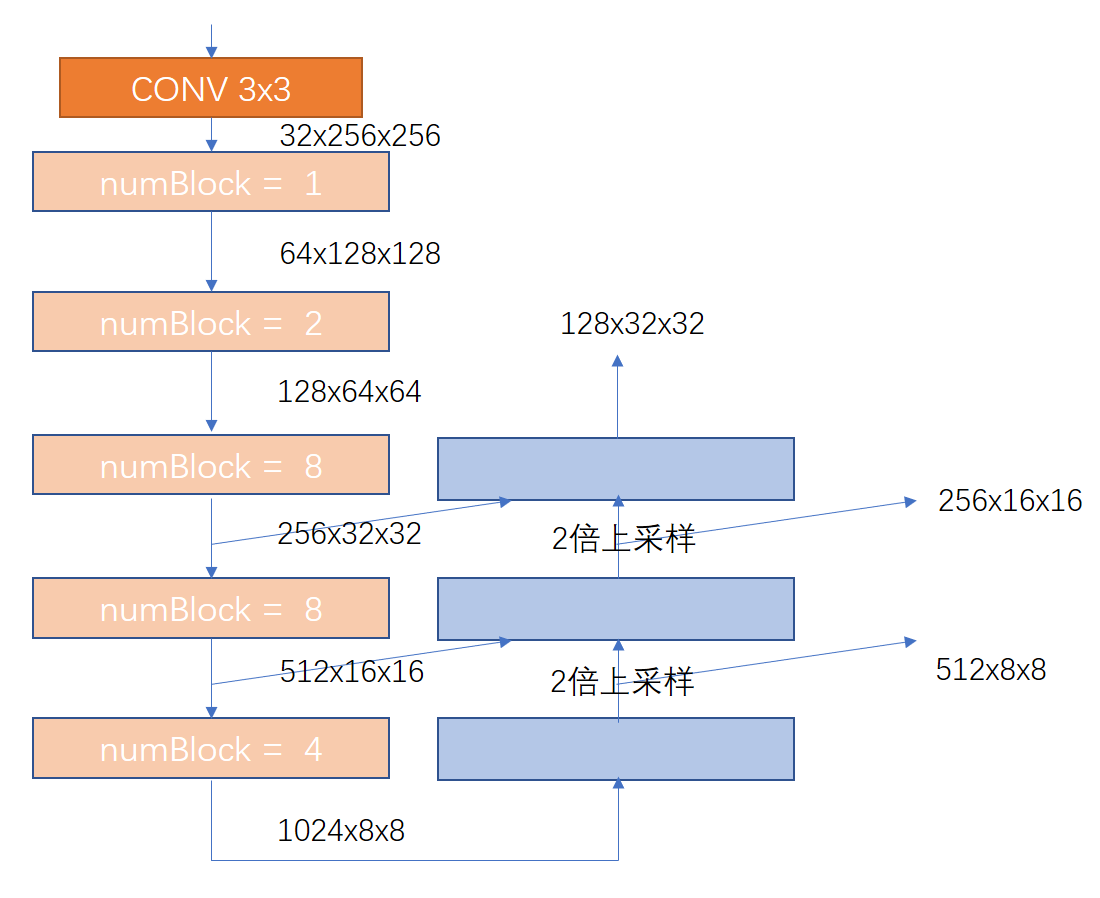
基本的模块已经定义好,Yolov3的模型就是把这些模型叠加起来。注意下图就是Yolov3的简化模型,数字表示该上一个模块的输出特征尺寸(CxHxW),相应的颜色对应相应的模块
class Yolov3(nn.Module): def __init__(self, numAnchor, numClass): super(Yolov3, self).__init__() self.dark_conv1 = DarknetConv2D_BN_Leaky(3, 32, ksize = 3, stride = 1, padding = 1) self.res1 = ResidualBlock(32, 64, 1) self.res2 = ResidualBlock(64, 128, 2) self.res3 = ResidualBlock(128, 256, 8) self.res4 = ResidualBlock(256, 512, 8) self.res5 = ResidualBlock(512, 1024, 4) self.last1 = LastLayer(1024, 512, numAnchor*(numClass+5)) self.up1 = nn.Sequential(DarknetConv2D_BN_Leaky(512, 256, ksize = 1, stride = 1, padding = 0), nn.Upsample(scale_factor=2)) self.last2 = LastLayer(768, 256, numAnchor*(numClass+5)) self.up2 = nn.Sequential(DarknetConv2D_BN_Leaky(256, 128, ksize = 1, stride = 1, padding = 0), nn.Upsample(scale_factor=2)) self.last3 = LastLayer(384, 128, numAnchor*(numClass+5)) def forward(self, x): x = self.dark_conv1(x)#32x256x256 x = self.res1(x)#64x128x128 x = self.res2(x)#128x64x64 x3 = self.res3(x)#256x32x32 x4 = self.res4(x3)#512x16x16 x5 = self.res5(x4)#1024x8x8 x,y1 = self.last1(x5)#512x8x8, x = self.up1(x)#256x16x16 x = torch.cat((x, x4), 1)#768x16x16 x,y2 = self.last2(x)#256x16x16 x = self.up2(x)#128x32x32 x = torch.cat((x, x3), 1)#384x32x32 x,y3 = self.last3(x)#128x32x32 return y1,y2,y3
到这里模型已经完成,模型代码结构非常清晰。有人可能会问,为什么要这种堆叠方式,其实我自己也觉得模型没什么特别的地方,自己根据新的需求定义网络结构完全可以,但是要注意模型深度增加时如何保证收敛,如何加速模型训练,同时输出特征的分辨率要计算好。
参考资料
Yolov3 论文:https://pjreddie.com/media/files/papers/YOLOv3.pdf
Yolov3 Keras实现:https://github.com/qqwweee/keras-yolo3
我的博客即将同步至腾讯云+社区,邀请大家一同入驻:https://cloud.tencent.com/developer/support-plan?invite_code=28tgpk9aapxc4