参考:《Robotics,Vision and Control》、《鱼雷航行力学》、其他学位论文
为了开题看论文,结果发现坐标转换矩阵这个基础部分竟然卡壳了,网上的一些讨论要不缺少中间过程,要不甚至是错的,于是整理了一下。
p.s.没想到《Robotics,Vision and Control》这本一直认为和研究关系不大的书成了救命稻草。


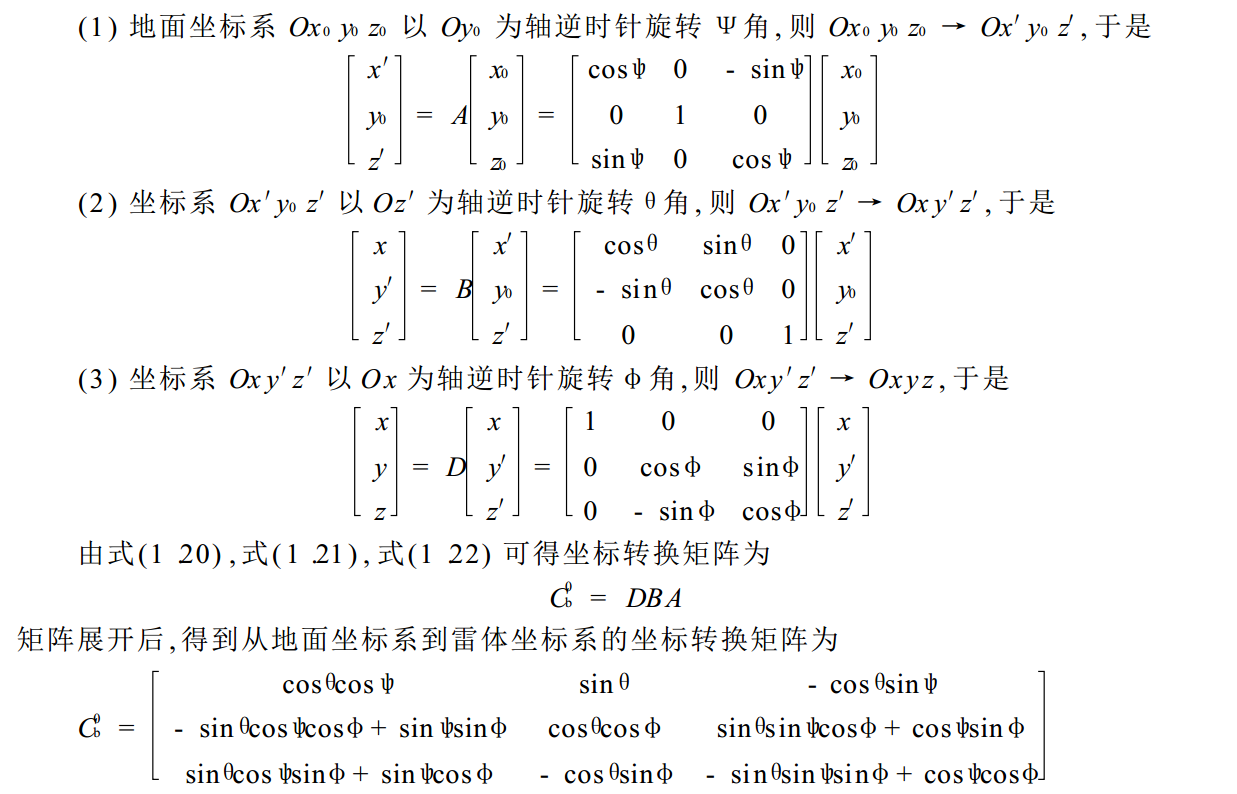
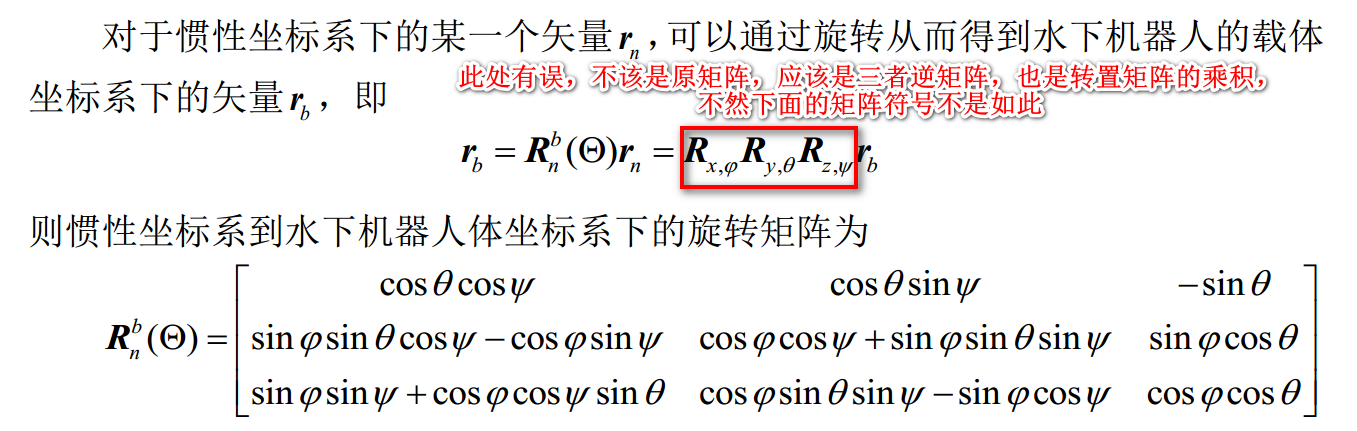
书上直接给出了分别绕x,y,z轴旋转sita角度的矩阵,而且这三个矩阵也经常见到。但值得注意的是,这三个矩阵其实是坐标系的转换矩阵,公式为
原坐标=[坐标转换矩阵]新坐标
而我们通常是希望求新坐标,所以
新坐标=[坐标转换矩阵的逆]原坐标
又因为是正交矩阵,所以求逆即转置
新坐标=[坐标转换矩阵的转置]原坐标
看了一些论文,虽然最后总的坐标转换矩阵是对的,但得出结论的过程里缺少了将坐标转换矩阵转置的操作,从而有误(虽然过程一般会被读者跳过),如下:
除此之外,也有的书籍(《鱼雷航行力学》)和论文,把前面的推导过程省略,直接给出了点对点的坐标转换矩阵,让人感觉很奇怪,甚至怀疑结论的正确性。(但后来推导发现这是转置后的矩阵)
于此同时,根据建立的坐标系的不同,旋转顺序也有差异,但有一定的标准。
下面《鱼雷航行力学》书上的旋转顺序,是因为建立了“东-天-南”的地面坐标系,即x轴指东,y轴指天,z轴指南,与之对应的雷体坐标系也是按照“东-天-南”来使用,其旋转顺序为y-z-x,分别旋转了航向-俯仰-横滚角。
而上面的旋转矩阵来自于某些航空类的书籍和论文,因为是z轴在垂直方向(有的是z轴指天,有的是z轴指地...),常用的导航角旋转顺序是z-y-x,同样是按照航向-俯仰-横滚角的顺序。