目录
摘要
围棋的困难点分析
如何绕过困难点
AlphaGo思想简介
网络训练流程分析
1.策略网络的监督学习
2.策略网络的强化学习
3.价值网络的强化学习
4.策略网络、价值网络联合MCTS
AlphaGo算法小结
AlphaGo棋力评估
Discussion
AlphaGo中MCTS的细节*
参考资料

|
摘要 |
用AI下围棋是一个非常大的挑战,因为围棋具有巨大的搜索空间,也难以评估棋面和动作的好坏。DeepMind提出了一种新的方法,即使用价值网络(value networks)来评估棋面好坏,使用策略网络(policy networks)来选择落子动作。这两个网络的训练过程有一些创新,使用的训练数据有人类高手的对弈数据以及AI左右博弈的数据。单纯的使用这两个网络,就可以达到蒙特卡洛树搜索(MCTS,以前的下棋程序主要用它)的水平。Deepmind又进行了创新,即把这两者(两个网络、MCTS)有机合并,最终达到了非常好的效果(打败欧洲冠军樊麾)。
|
围棋的困难点分析 |
具有完备信息的游戏都会有一个最优的价值函数(value function), ,它能够在任何的状态s(棋面)下知道游戏的最终胜负。其实就是穷举的思想,做法就是在某个状态下,递归的向下展开游戏树,然后就知道所有落子位置的精确胜率。但是,展开一棵游戏树是不可能的,因为复杂度太高为
,它能够在任何的状态s(棋面)下知道游戏的最终胜负。其实就是穷举的思想,做法就是在某个状态下,递归的向下展开游戏树,然后就知道所有落子位置的精确胜率。但是,展开一棵游戏树是不可能的,因为复杂度太高为 ,b表示游戏的宽度(可以落子的位置数),d是深度(游戏的长度)。
,b表示游戏的宽度(可以落子的位置数),d是深度(游戏的长度)。
|
如何绕过困难点 |
所以就需要对价值函数进行近似,可以从两方面入手:
1.减少搜索深度:
通过位置评估的方式,对树的搜索进行截断。比如搜索到某个状态s,使用一个近似函数 来预测当前价值,就不继续向下展开游戏树了。
来预测当前价值,就不继续向下展开游戏树了。
2.减少搜索宽度:
在某个状态下,不对所有的可以落子的位置进行搜索,而是通过落子位置采样的方式,也就减小了搜索宽度。落子的采样可以服从策略 的分布。
的分布。
|
AlphaGo思想简介 |
使用残差网络的架构,将棋盘状态编码为19*19的张量(19是棋盘大小)作为输入,来训练价值网络 和策略网络
和策略网络 。
。
网络的训练分成了几个阶段:
1.训练监督学习策略(SL)网络 ,使用的是人类围棋专家的对弈数据。使用相同的方法,再训练监督学习策略网络
,使用的是人类围棋专家的对弈数据。使用相同的方法,再训练监督学习策略网络 ,该网络更小,推理速度更快。
,该网络更小,推理速度更快。
2.训练强化学习策略(RL)网络 ,该网络训练参数以
,该网络训练参数以 的参数为起点,使用左右博弈产生的数据,进行强化学习,可以理解成对
的参数为起点,使用左右博弈产生的数据,进行强化学习,可以理解成对 的进一步提升。这里补充一下,SL模型的输出是对准确率的预测(输入一个棋面,输入下一步落子位置),而RL模型就是要突破人类的经验,去探索对取胜更有价值的路数。
的进一步提升。这里补充一下,SL模型的输出是对准确率的预测(输入一个棋面,输入下一步落子位置),而RL模型就是要突破人类的经验,去探索对取胜更有价值的路数。
3.训练一个价值网络 ,该网络输入的是棋面,输出的是获胜的概率,其中使用的下棋策略就是RL模型。
,该网络输入的是棋面,输出的是获胜的概率,其中使用的下棋策略就是RL模型。
以上就是网络训练部分
但是最终Deepmind还借鉴了MCTS的思想,对AlphaGo的能力做了进一步的提升。
|
网络训练流程分析 |
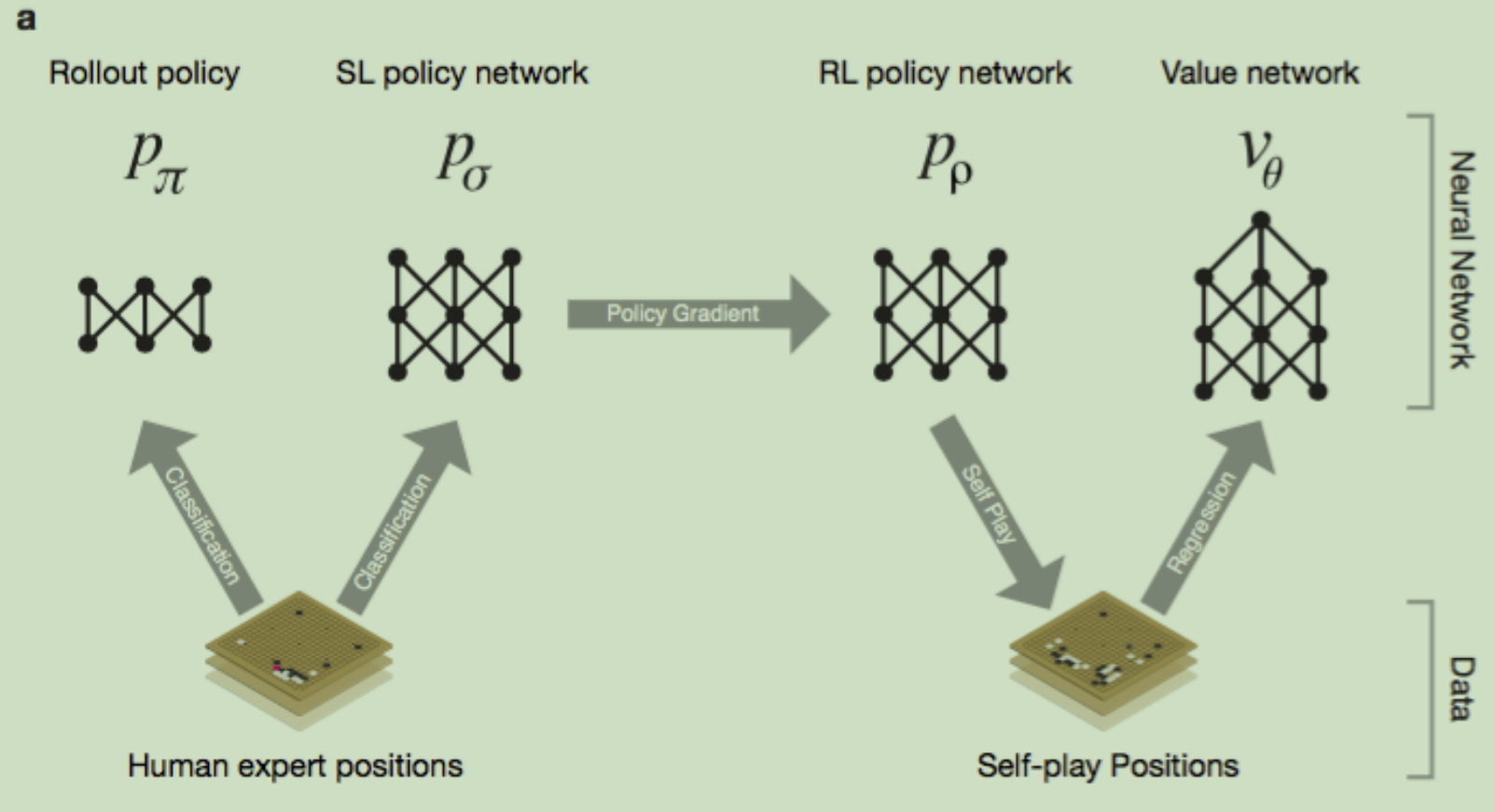
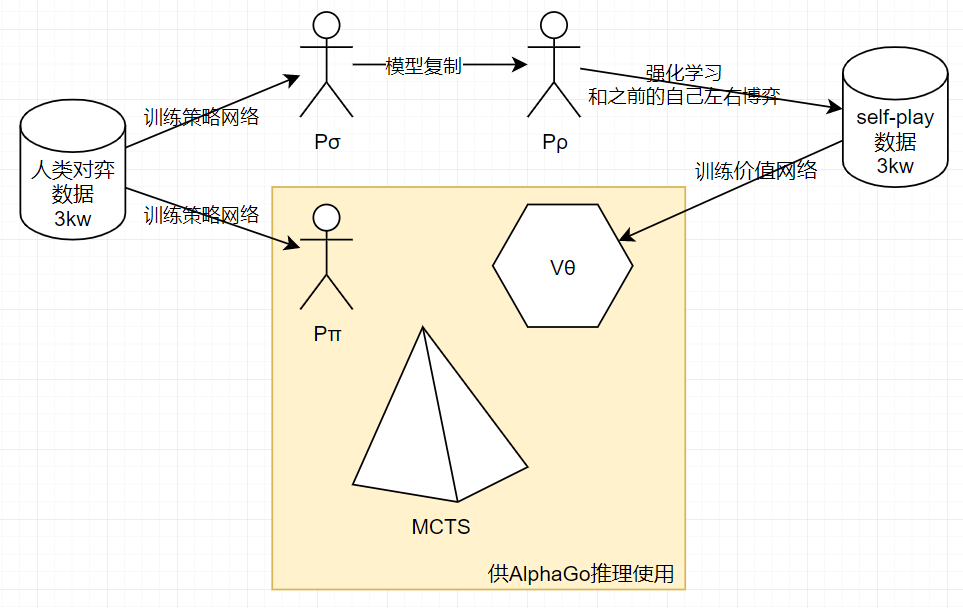
在上图a中,可以看出, 和
和 使用人类专家的下棋动作来进行监督学习训练(Softmax多分类)。
使用人类专家的下棋动作来进行监督学习训练(Softmax多分类)。
 拷贝
拷贝 的参数,再让
的参数,再让 左右博弈,自己和若干轮前的自己博弈,使用policy Gradient进行强化学习,得到自我对弈的数据。
左右博弈,自己和若干轮前的自己博弈,使用policy Gradient进行强化学习,得到自我对弈的数据。
使用自我对弈的数据,通过回归的方式训练价值网络 ,输入是棋面,输出是该棋面的价值
,输入是棋面,输出是该棋面的价值

在上图b中可以看出:
策略网络,输入的是棋面,输出的是合理落子位置的概率(向量)
价值网络,输入的是棋面,输出的是价值(标量)
下面对每一个细节进行展开,包括:
1.策略网络的监督学习
2.策略网络的强化学习
3.价值网络的强化学习
4.策略网络、价值网络联合MCTS
|
1.策略网络的监督学习 |
SL策略网络 的结构是卷积网络(13层),参数为σ,和relu激活函数,输出层是Softmax分布,每个值表示一个位置落子的概率。
的结构是卷积网络(13层),参数为σ,和relu激活函数,输出层是Softmax分布,每个值表示一个位置落子的概率。
训练数据是人类围棋高手的3kw盘对弈数据,输入是某一个棋盘状态s,标签是下一个落子动作a,参数更新为梯度上升法,梯度值为

AlphaGo Zero的棋盘状态的表示比较简单(只使用黑白,19*19*2),但是AlphaGo的棋盘状态略微复杂(如下表所示,19*19*48),

模型的训练结果是:在测试集上的准确率为57%。使用同样的方法也训练了一个小的网络 ,它的准确率低(24.2%)但是推理速度快(2微妙,
,它的准确率低(24.2%)但是推理速度快(2微妙, 是3毫秒)。
是3毫秒)。
卷积核多少对结果影响的分析:
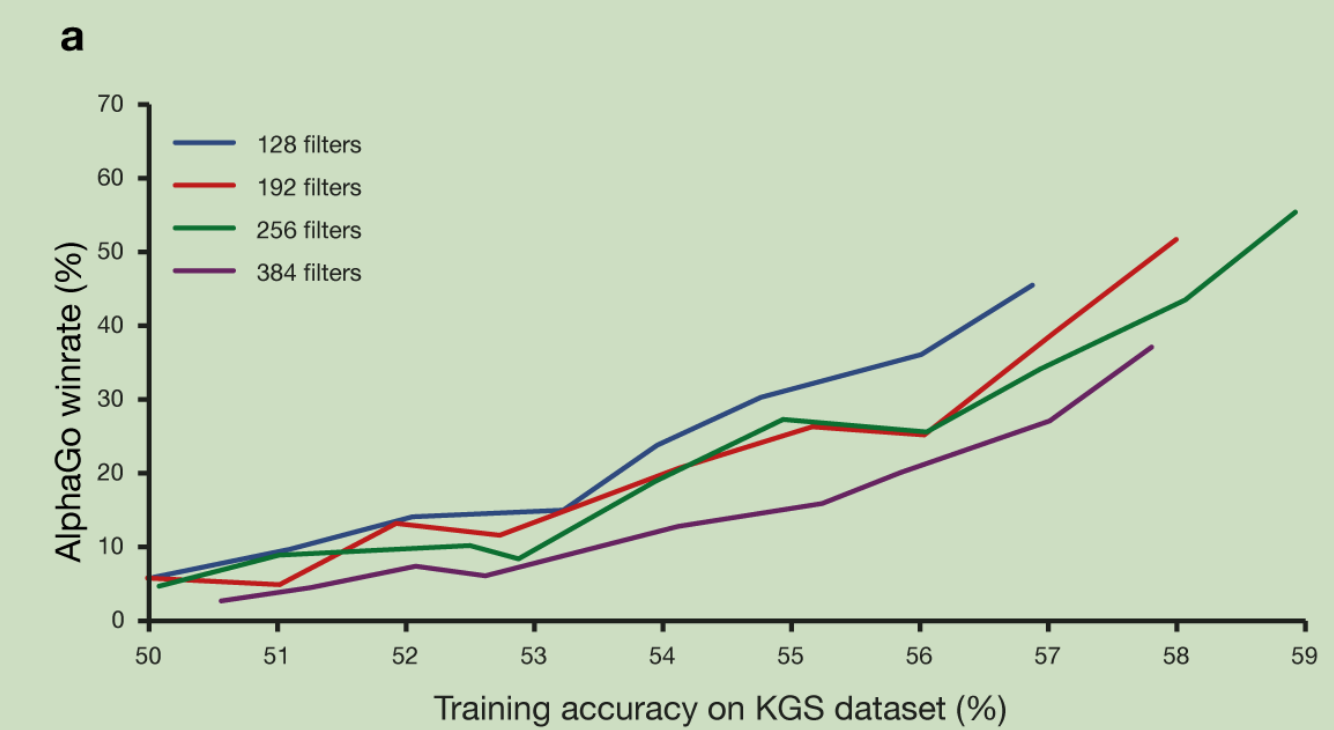
策略网络每一层的卷积核个数可以选128,192,256,384,上图描述了不同参数下,AlphaGo的胜率(最新策略和若干轮前的策略)。可以看出256的训练准确率最高,胜率也是最高。
|
2.策略网络的强化学习 |
 使用
使用 来初始化,即网络结构和参数都一样。使用当前
来初始化,即网络结构和参数都一样。使用当前 和之前轮中随机抽出的进行对弈,这种随机的从对手池中选择对手的方式可以防止过拟合,使得训练更加稳定。
和之前轮中随机抽出的进行对弈,这种随机的从对手池中选择对手的方式可以防止过拟合,使得训练更加稳定。
网络更新方法采用随机梯度下降法,梯度为:
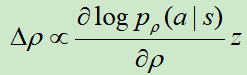
其中,如果以取胜结束,z=1,否则为-1。其实就是赢了就加强 ,输了就降低
,输了就降低 。
。
RL模型的效果,和SL模型对弈可以有80%的胜率。
|
3.价值网络的强化学习 |
 计算的是在状态s下,使用策略p的价值
计算的是在状态s下,使用策略p的价值

然而, 只能使用一个价值网络
只能使用一个价值网络 来逼近,
来逼近, 训练的输入是某一个棋面状态,标签是最终是否取胜(-1或+1),损失函数使用MSE,使用随机梯度上升更新参数,参数的梯度为
训练的输入是某一个棋面状态,标签是最终是否取胜(-1或+1),损失函数使用MSE,使用随机梯度上升更新参数,参数的梯度为
这里有一个训练的技巧,训练数据不能够按照游戏的顺序输入,因为前后的样本只有一个棋子位置的不同,这样会导致模型过拟合。Deepmind的做法是从不同的棋局(RL自我对弈)中随机抽取训练样本,最终的模型效果是MSE=0.226(训练),MSE=0.234(测试)
价值网络的真实表现如何呢?下图进行了比较

可以看出,value network的效果比MCTS+ 预测得概率更准;
预测得概率更准;
value network比MCTS+ 预测稍差一些,但是减少了1万5千倍的计算量。
预测稍差一些,但是减少了1万5千倍的计算量。
|
4.策略网络、价值网络联合MCTS |
AlphaGo将策略网络和价值网络和MCTS算法进行了结合,这样可以让AlphaGo具有向前搜索动作的特质,可以做出更佳的决策。结合的方式如下图所示:
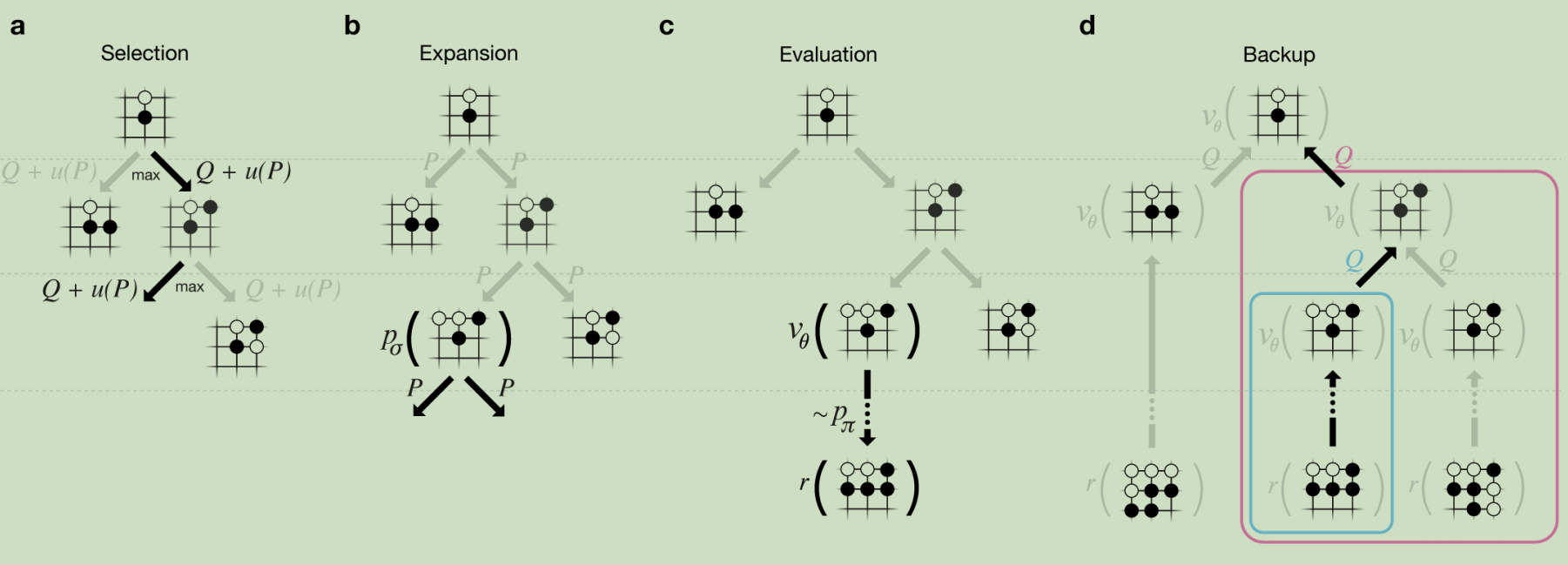
搜索树的每一条边(s,a)上,存储了一个动作价值Q(s,a)、访问次数N(s,a)和先验概率P(s,a)。
从根结点开始对该树进行仿真遍历(仿真遍历其实就是从某个位置,使用某个策略,玩到游戏结束)。在仿真过程的每一个时间步t,基于状态st选择at的方法为:

其中,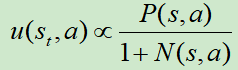 ,先看分母,就是鼓励探索的机制;再看分子P(s,a)是由SL模型进行计算所得的先验概率,这里为什么不使用更强的RL模型呢?Deepmind给出的答案是,他们通过实践发现SL的效果更好,可能因为SL模型学习的是人类高手,他们会给出多种多样的走棋方式,更适宜和MCTS进行结合;而RL模型的走棋路数较为单一,会限制和MCTS结合的效果。
,先看分母,就是鼓励探索的机制;再看分子P(s,a)是由SL模型进行计算所得的先验概率,这里为什么不使用更强的RL模型呢?Deepmind给出的答案是,他们通过实践发现SL的效果更好,可能因为SL模型学习的是人类高手,他们会给出多种多样的走棋方式,更适宜和MCTS进行结合;而RL模型的走棋路数较为单一,会限制和MCTS结合的效果。
在研究 之前需要先研究
之前需要先研究 。
。

sL是当前蒙特卡洛树的叶子结点(结点就是对应某个棋面状态); 是价值网络对该状态估计出来的价值;zL是由
是价值网络对该状态估计出来的价值;zL是由 在该状态下玩到游戏结束获得的回报值;λ是一个平衡因子。
在该状态下玩到游戏结束获得的回报值;λ是一个平衡因子。
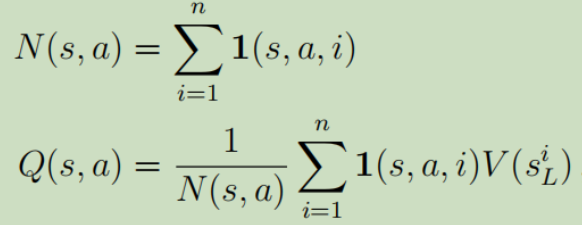
其中n表示MCTS的仿真次数。N(s,a)就是边(s,a)的总访问次数。
动作价值Q就是把(s,a)边下面子树所有的叶节点的V求均值。
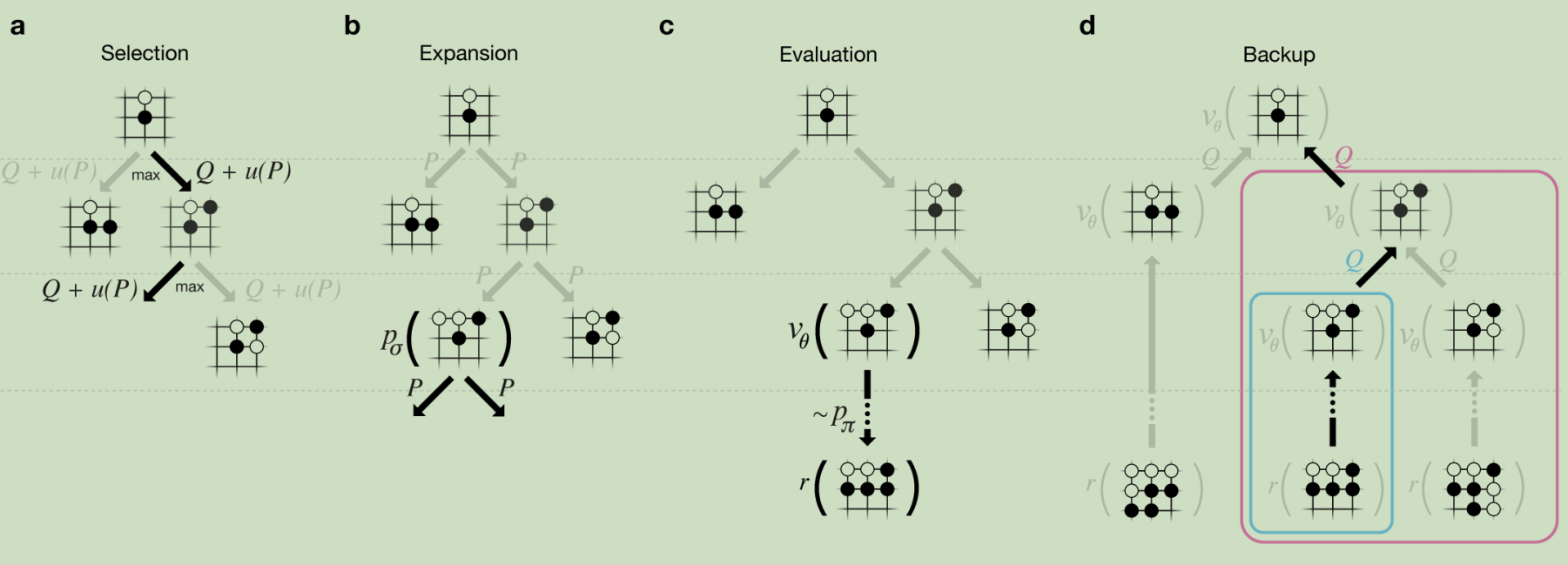
再回过头来看此图(MCTS和AlphaGo的结合),
a.每次仿真遍历树通过选择最大动作价值Q和u(P)的边。
b.叶结点可能会被扩展(依照MCTS的原理,首次遍历会求值,非首次遍历就会扩展,列出所有可能的动作),新的结点会被 计算一次,并且存为每个动作的先验概率P。
计算一次,并且存为每个动作的先验概率P。
c.在仿真结束时,叶结点被两种方式评估:价值网络 和使用
和使用 进行游戏到结束然后计算回报值r.
进行游戏到结束然后计算回报值r.
d.自底向上地更新(s,a)对应的动作价值Q。
Deepmind补充:如前面所说的先验概率采用的是SL模型(前面已经给出原因),但是在训练价值网络层面,经实践证明,使用RL模型产生的数据训练价值网络效果会更好。
最终模型在推理的时候,单机版AlphaGo使用了48个CPU和8个GPU,CPU开40线程进行树搜索,GPU提供网络传播的运算。分布式版本的AlphaGo使用了1202个CPU和176个GPU,并实现了分布式版本的MCTS。这里补充一点:推理时间是影响AlphaGo水平的一个关键因素,主要就是因为MCTS的采样特点,采样的越多,计算的越准,也就越耗时。
|
AlphaGo算法小结 |
|
AlphaGo棋力评估 |
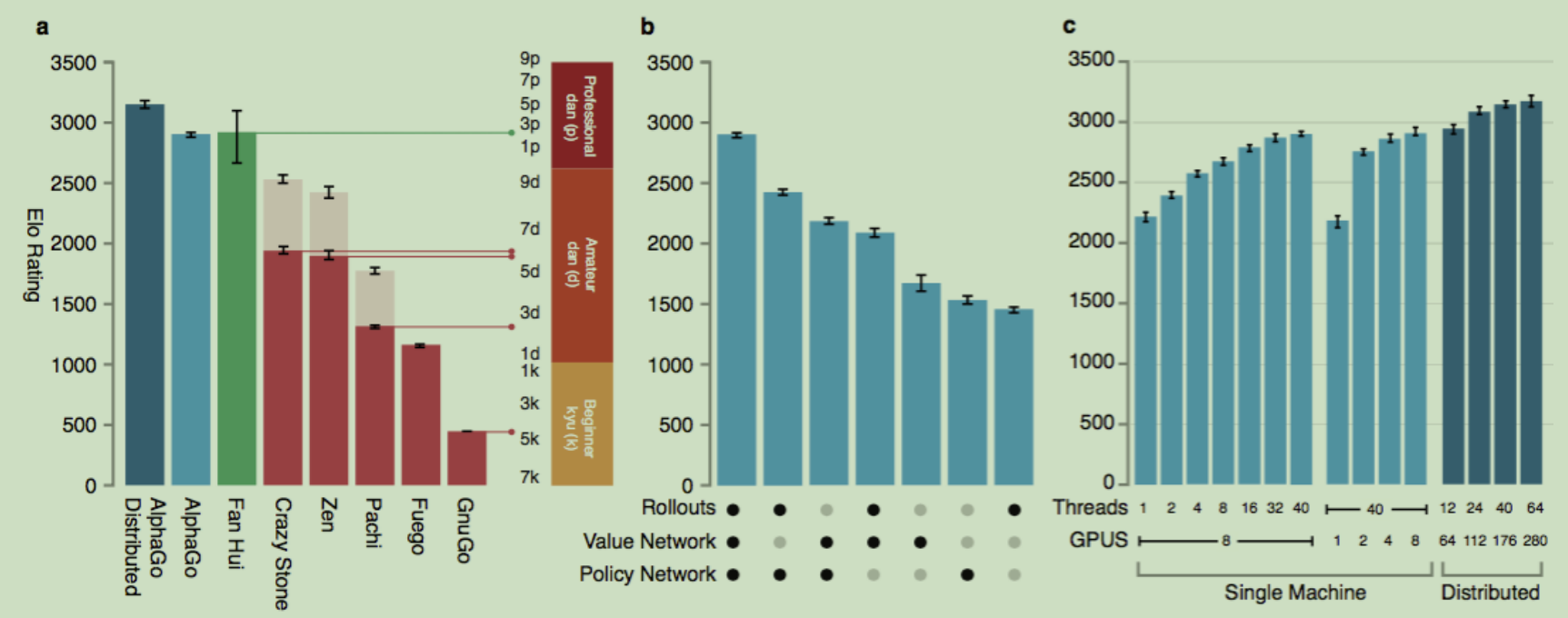
上图a中,其他的围棋程序主要以高性能的MCTS为主,限制每步计算时间为5秒,可以看出分布式版本的AlphaGo效果很好。
上图b中,可以看到综合使用这几种策略,效果更佳。
上图c说明分布式版本的优势。
|
Discussion |
Deepmind基于深度神经网络和树搜索,使用监督学习和强化学习算法,发明了围棋AI程序——ALphaGo,这是这个时代的一大壮举。AlphaGo不仅达到了围棋的专业水平,也让人们看到了AI在其他人们认为难以攻克的领域取得突破的曙光。
|
AlphaGo中MCTS的细节* |
这里对MCTS的一些细节进行解析,感兴趣的读者可以阅读。
为了让AlphaGo更高效地利用神经网络,Deepmind发明了APV-MCTS(asynchronous policy and value MCTS)。
搜索树上的每一个状态结点记为s,每一条边记为(s, a)表示每一个合法的动作,每一条边上存着一个数据集合:{P(s, a), Nv(s, a), Nr(s, a), Wv(s, a), Wr(s, a), Q(s, a)}。
P(s, a)表示该边被选中的先验概率(使用pσ算的);
Nv(s, a)表示该边被访问的次数;
Nr(s, a)也表示该边被访问的次数,这里之所以使用两个变量,是为了使用虚拟损失,以并行化MCTS;
Wv(s, a)表示总的动作价值(total action-value),每次仿真执行这条边上的a,都会由价值网络算出一个v,就是v的累加。
Wr(s, a)表示总的rollout动作价值(total action-value),每次仿真执行这条边上的a,都会用pπ玩到游戏结束得到一个结果z,就是z的累加。
Q(s, a)表示平均动作价值(mean action-value)。
多个仿真会在不同的搜索线程中并行执行,APV-MCTS算法执行步骤如下图所示:

在上图a中,展示的是选择(Select)。每一次仿真从搜索树的根结点s0出发,在时间步L到达叶结点SL该次仿真过程结束,期间使用的策略是pπ。在每一个时间步t<L,选择动作的依据为 ,Q还是如前文所述,但是u略有变化,这里使用了一个PUCT的变体算法,其中
,Q还是如前文所述,但是u略有变化,这里使用了一个PUCT的变体算法,其中 ,cpuct是一个控制探索的常量。
,cpuct是一个控制探索的常量。
上图c中,展示的是评估(Evaluate)。叶结点SL被添加到队列,然后由价值网络进行评估。然后以该叶结点为起点进行第二次仿真,这次一直玩到游戏结束,期间使用的策略也是pπ。游戏结束后会返回一个分数 。
。
在上图d中,展示的是回溯(Backup)【这里难度较大,因为这里涉及到MCTS的并行化搜索】。在仿真过程中的每一个时间步t<L,在rollout过程中,其统计数据会被更新,更新的原则就是假定他输了nvl 场(论文里取nvl=3)游戏,即,Nr(st, at) = Nr(st, at) + nvl ; Wr(st, at) = Wr(st, at) - nvl;这个虚拟损失的作用就是不鼓励其他线程也同时地探索这个位置。当这次仿真结束了,就把真实的值赋值回来,即Nr(st, at) = Nr(st, at) - nvl +1; Wr(st, at) = Wr(st, at) + nvl + zt;【这里的+1表示该边被多访问了一次,+z表示把真实的游戏结果加到总的rollout动作价值】。
和价值网络有关的更新比较,即Nv(st, at) = Nv(st, at) +1; Wv(st, at) = Wv(st, at) + vθ(sL);
至于Q,就是一个带权和,(论文中取λ=0.5) 整个的更新过程是一个无锁树的更新(lock-free)。
整个的更新过程是一个无锁树的更新(lock-free)。
在上图b中,展示的是扩展(Expansion)。【这里使用了树策略,动态调整阈值等,已经被AlphaGo Zero抛弃,感兴趣的读者可以自行研究】
在所有的搜索结束后,AlphaGo会以执行访问次数最多的边上的动作,这样会对异常值更稳定,那用N的合理性在哪呢?其实换个角度想想就明白了,如果一个结点被探索的次数很多,说明该结点下的子结点一定含有很多“高招”)。落子完成后,搜索树可以被重用,被选中的边的子结点又变成根结点,上面的统计值继续使用,未被选中的分支会被舍弃。当搜索树的根结点和最好的子结点的胜率小于一定阈值(10%)时AlphaGo Zero就会认输。
|
参考资料 |
《Mastering the game of Go with deep neural networks》
MCTS可以参考:https://www.bilibili.com/video/BV1JD4y1Q7mV?from=search&seid=191148648235214401