欢迎关注个人公众号摸鱼范式

------------------------------------------
版权声明:
本文作者: 烓围玮未
首发于知乎专栏:芯片设计进阶之路
转发无需授权,请保留这段声明。
------------------------------------------
单bit信号跨时钟域的处理
信号跨时钟域,根据两个异步时钟之间的关系可以分为:
- 信号从快时钟域到慢时钟域;
- 信号从慢时钟域到快时钟域;
单bit信号一般采用同步器来做CDC。这里要指出的一点是,由于在CDC时,会在源时钟域做寄存输出,所以信号的变化频率不会超过源时钟的频率(请参考《亚稳态和同步器》),所以这里能够以两个时钟之间的快慢来分类。
快时钟域到慢时钟域
快时钟到慢时钟CDC问题
信号从快时钟到慢时钟CDC如下图所示
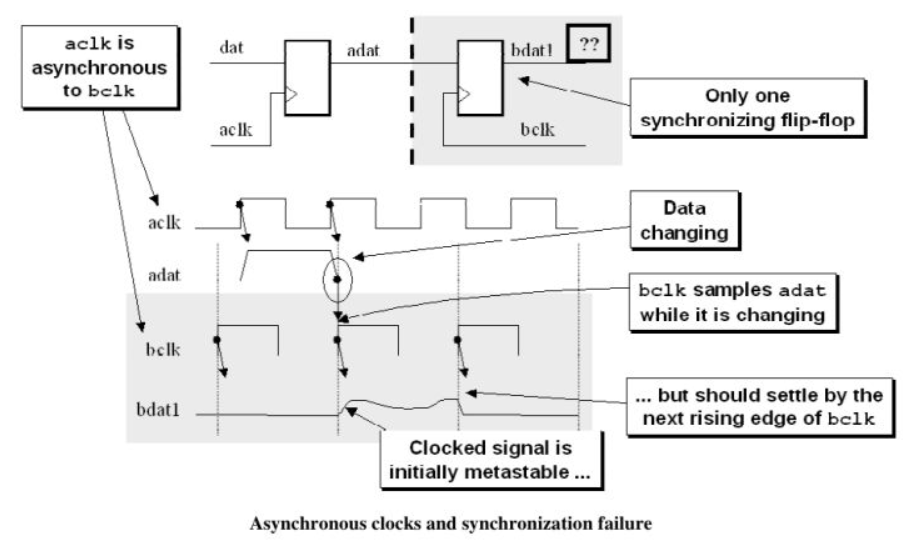
上图显示了当在一个时钟域(aclk)中生成的信号adat被送到了另一个时钟域(bclk)中采样,由于采样时间太靠近第二个时钟的上升沿时,发生的同步失败。同步失败是由于输出bdat1变为亚稳态,而在bdat1再次被采样时没有收敛到合法的稳定状态。
这里注意一下,如果是电平信号进行CDC, 那么不用考虑时钟快慢,直接用同步器就可以了,因为总能被采样到。所以,下面考虑的主要是信号位宽有限的CDC。
快时钟到慢时钟的(单bit)信号处理,主要问题就是信号在快时钟域中,可能会多次改变,这样慢时钟可能来不及采样,导致丢失数据。这个问题被称为信号宽度问题,在CDC检查工具中,如果快时钟的信号宽度不足,会报出CDC违例。
快时钟到慢时钟的(单bit)信号处理分为两种:
-
采样丢失是被允许的。单bit信号一般不会是这种情况,如果是这种情况,直接用同步器同步就可以了。
-
采样丢失不被允许。这样就要采样其他手段来保证数据不丢失。主要原理是保证快时钟域的信号宽度满足一定的条件,使得慢时钟域有足够时间采样到。
信号宽度的“三时钟沿”要求
那么信号在快时钟域到底需要多宽,才能保证在慢时钟域安全的被采样到呢?比较安全的宽度是,快时钟域的信号宽度必须是慢时钟域时钟周期的1.5倍以上。也就是要持续3个时钟沿以上(上升沿和下降沿都算)。这个被称为:“三时钟沿”要求。
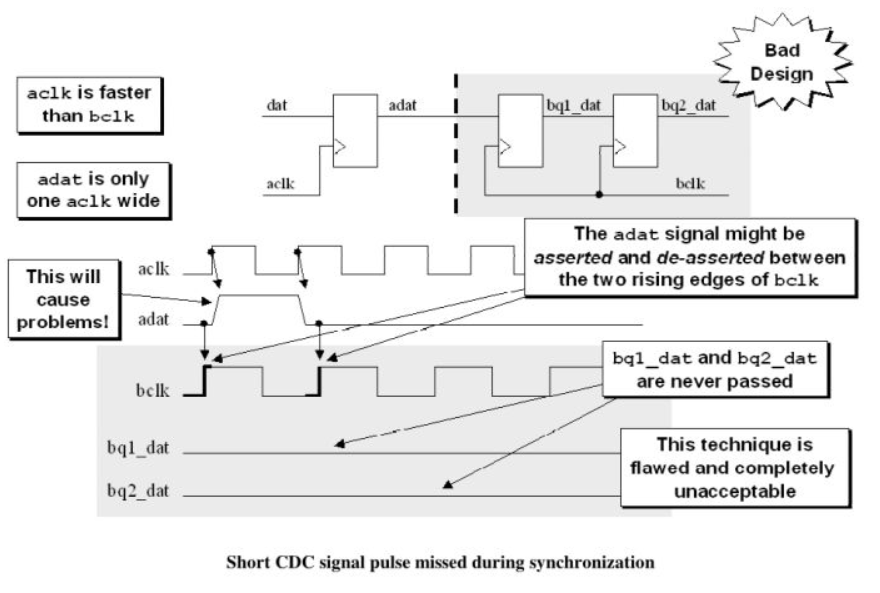
下面是一个CDC信号只持续一个周期的例子:
发送时钟域的频率高于接收时钟域,而CDC脉冲在发送时钟域中只有一个周期宽,这样CDC信号可以在慢时钟上升沿之间变动,不会被捕获到慢时钟域,如下图所示
如果CDC信号宽度超过慢时钟周期,但是不足1.5个周期,也会发生问题。如下图所示
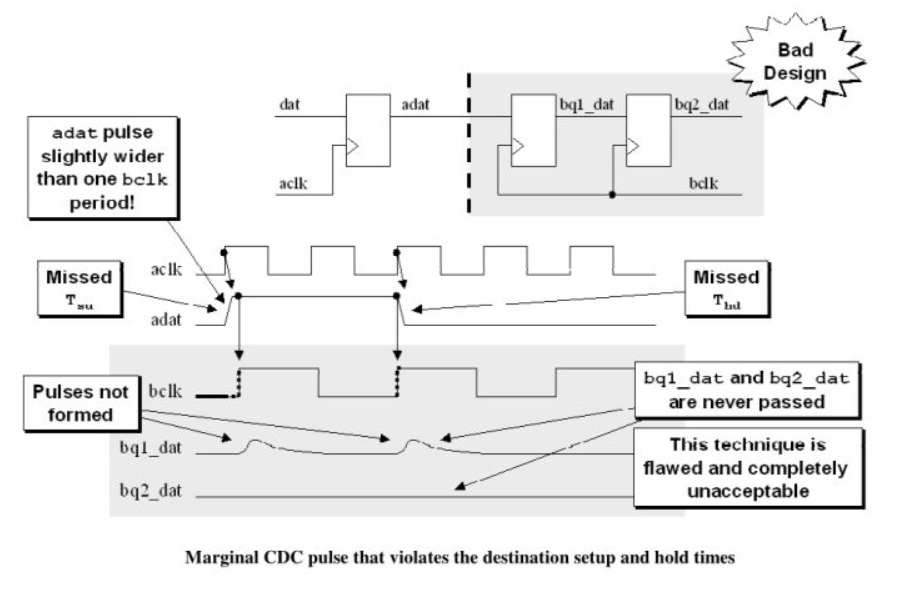
如上图所示,信号宽度超过了一个慢时钟周期,但是可能会setup和hold time违例,导致信号采样失败。
信号宽度问题的解决方法
一种最简单的方法是,通过保证信号宽度满足超过慢时钟的时钟周期1.5倍,来解决这个问题。这种方法是最直接,也是跨时钟最快的方法。可以通过system Verilog加“断言”的方式来检测是否满足条件。
但是实际中很少用这种方式,因为设计可能会变,设计人员在改变设计时,可能会忘记这个限制,以为是一个通用的解决方法。
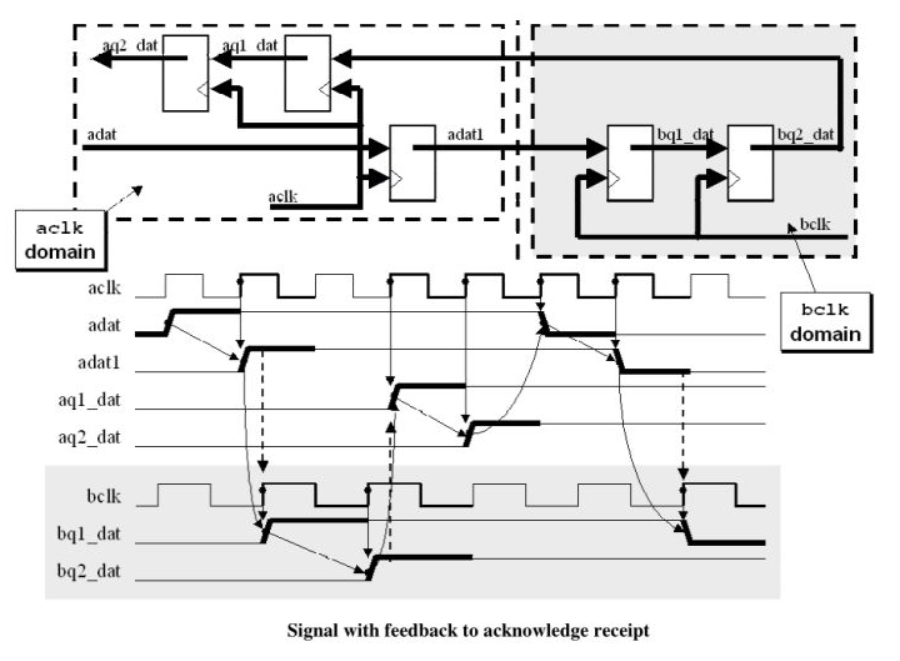
所以,常用的还是通过“握手”的方式来保证数据被采样到。
通常的做法是:是发送一个使能控制信号,将它同步到新的时钟域,然后通过另一个同步器将同步信号作为确认信号传回发送时钟域。如下图所示:
优点:
同步反馈信号是一种非常安全的技术,可以识别第一个控制信号并将其采样到新的时钟域中。
缺点:
在允许控制信号改变之前,在两个方向上同步控制信号可能会有相当大的延迟。也就是说,在应答信号到来之前,是不允许源信号改变的。
在实际的芯片设计中,脉冲(宽度有限)信号的同步都是采用这种握手机制来处理。
慢时钟到快时钟域
慢时钟域到快时钟域的CDC, 直接使用信号同步器就可以了。具体逻辑可以参考《亚稳态和同步器》。
但是,这里有一点要指出来,那就是怎么才算慢时钟域到快时钟域的CDC呢?这里和平常理解的有点不一样。
目标时钟频率必须是源时钟频率1.5倍或者以上,才能算慢时钟到快时钟的CDC.
这也很好理解,只有满足快1.5倍以上,才能满足“三时钟沿”的要求,才能保证快时钟域保证能够采样到慢时钟域的脉冲。
如果目标时钟域只快一点,比如1~1.5倍之内,为了保险起见,请按照快时钟到慢时钟域的处理方法来处理。
另外,有的设计中为了保险和以后修改的方便;或者还不清楚时钟之间的关系;都会按照快时钟到慢时钟域的的方式来进行单bit的CDC处理。
多bit信号跨时钟域的处理
在两个时钟域之间传递多个信号,简单的同步器已经不能满足要求。
工程师经常容易犯的错误是,直接用简单同步器来同步多个信号。如下图所示:
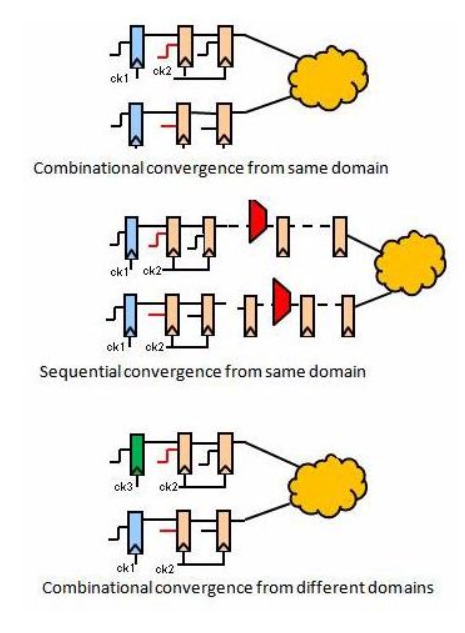
这里列出理两个信号分别通过同步器同步后,在目标时钟域聚合后使用的三种场景。问题是两个同步器,跨时钟的延时可能不一样,比如信号从2’b00->2’b11, 上面的同步器花了2个周期同步到了目标时钟域;下面的同步器花了3个周期才同步到目标时钟域。那么在第二和第三周期之间,就出现了2’b10的值了,即出现了错误的采样信号,这样功能有可能就不正确了。
如果不明白,为什么同步器的同步延时会不一样,可以参考可以参考《亚稳态和同步器》。
另外,不同同步器的芯片上的走线也可能不同,导致延时不一样。即使我们完美的控制后端不同bit同步信号的走线长度一样,同一个die上面不同芯片之间或者不同制程之间的偏差,都可能引入差异,导致多bit信号的延时不同。而且这样对后端走线难度增大。
考虑到以上两点,多个信号的CDC一般不用简单同步器的方法。在CDC检查时,会有专门的规则来检查是否采样了多bit信号用同步器同步聚合使用的情况。
为了避免多位CDC倾斜采样的情况,多个信号CDC策略可以分为三种:
-
多个信号合并。在可能的情况下,将多个CDC位合并为1位CDC信号。
-
多周期路径法。使用同步负载信号安全地传递多个CDC位。
-
使用格雷码传递多个CDC位。
-
使用异步FIFO来传递多位信号。
多个信号合并
在可能的情况下,将多个CDC信号合并为一个1位的CDC信号。有些时候,并不需要将多个信号来做CDC。下面是两个多个信号合并为一位信号做CDC的例子。这里
例子1:
下图所示的简单示例中,接收时钟域中的寄存器需要加载信号和使能信号才能将数据值加载到寄存器中。如果负载和使能信号都是在同一个发送时钟边缘上驱动的,那么控制信号之间的小偏差就有可能导致两个信号在接收时钟域中同步到不同的时钟周期。在这种情况下,数据不会被加载到寄存器中,就会出问题。
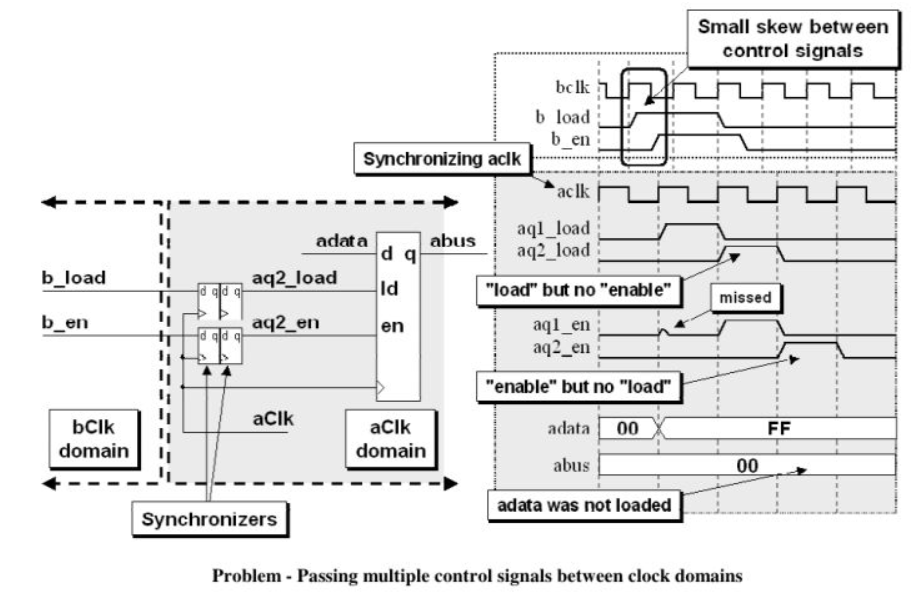
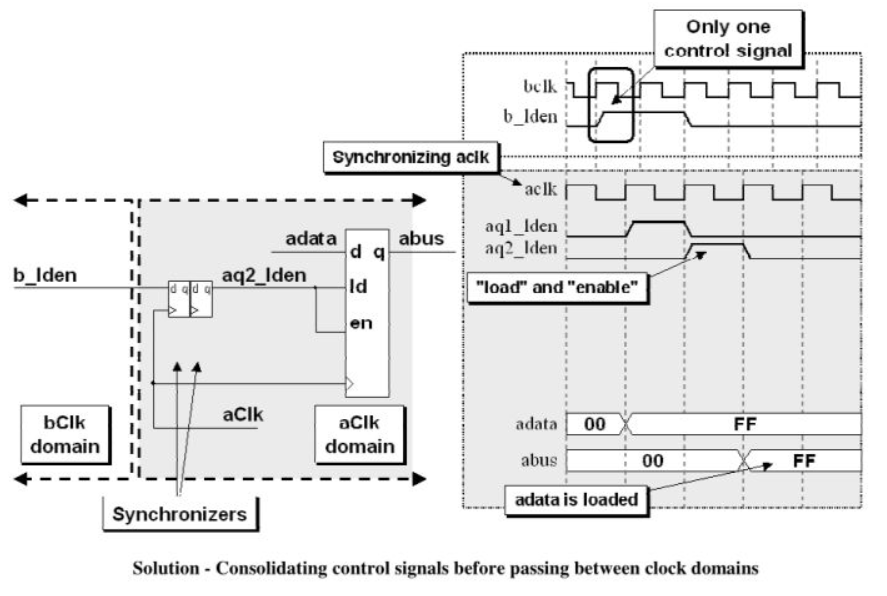
解决方法也很简单,将控制信号b_load和b_en合起来:b_lden=b_load & b_en 同步到aclk域中。
例子2:
下面是另外一个例子:
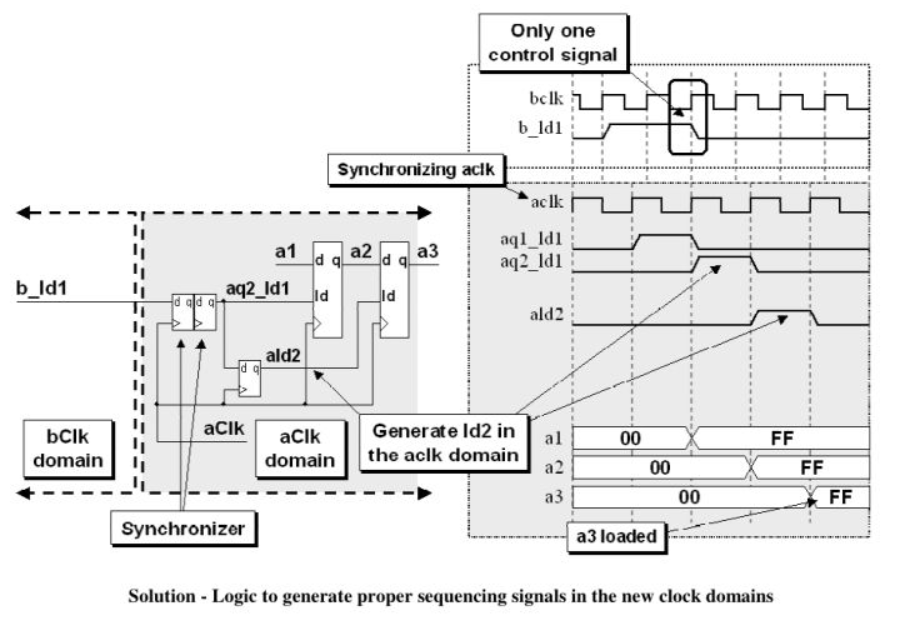
下图中的显示了两个使能信号,aen1和aen2,它们从发送时钟域依次驱动到接收时钟域,以控制流水线数据寄存器的使能输入。问题是同步器并不能保证两个cycle就一定能同步过来,下面的同步器花了3个cycle才同步完成数据,导致流水线寄存器不能“流水”起来。

该问题的解决方案是只向接收时钟域发送一个控制信号,并在接收时钟域内生成第二个相移流水线使能信号。如下图所示:
多周期路径(Multi-Cycle Path, MCP)
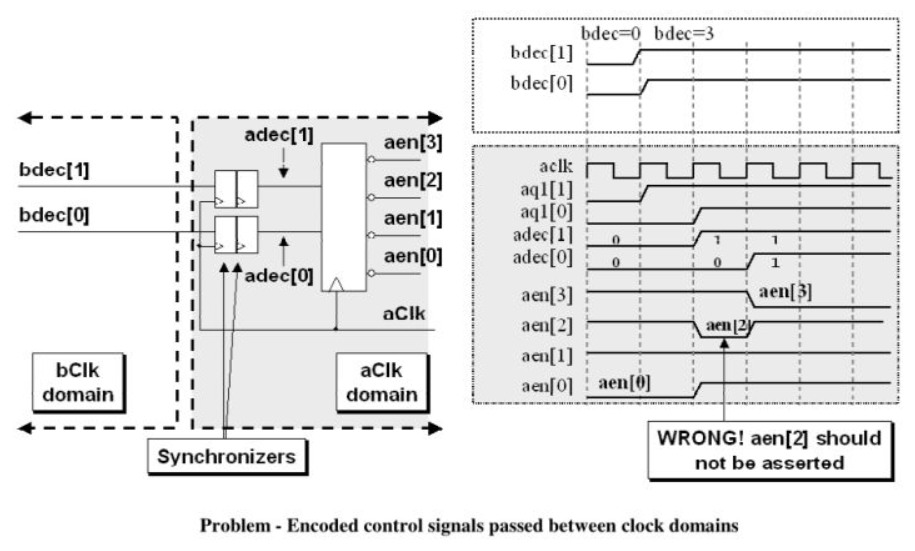
下图中显示了在时钟域之间传递的两个编码控制信号。如果这两个编码信号在采样时略有偏差,则在接收时钟域中的一个时钟周期内可能会产生错误的解码输出。
多位数据问题可以用“多周期路径法(MCP)”来解决。
MCP方法是指直接不同步将数据发生到目标时钟域,但是同时送一个同步过的控制信号到目标时钟域。数据和控制信号同时发送,允许数据在目标寄存器的输入端进行设置,同时控制信号在到达目标寄存器的负载输入端之前做同步。
MCP方法的优点:
(1)不需要在发送时钟域计算适当的脉冲宽度
(2)发送时钟域只需要将enable toggle到接收时钟域,表示数据已经被传递完成,已经准备好被加载。使能信号不需要返回到初始逻辑电平。
MCP方法的实质就是,不同步多位的数据,只同步一位的控制信号,通过握手保证控制信号能够正确传输,然后在目标时钟域通过控制信号来采样数据。
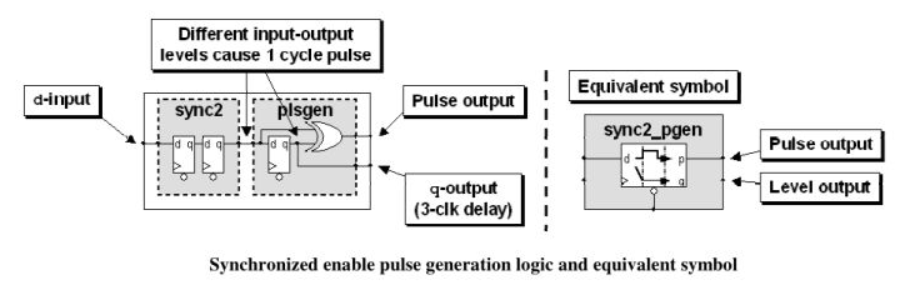
MCP需要用到“同步脉冲器”:

同步脉冲器的符号表示如下:
多周期路径法有两种方法来传递多位信号:
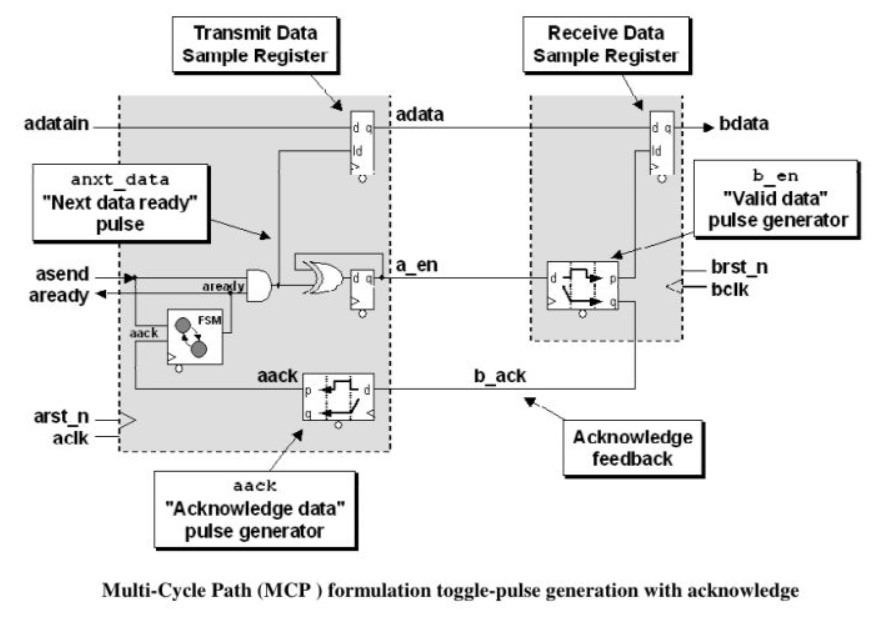
带反馈的MCP
电路图如下
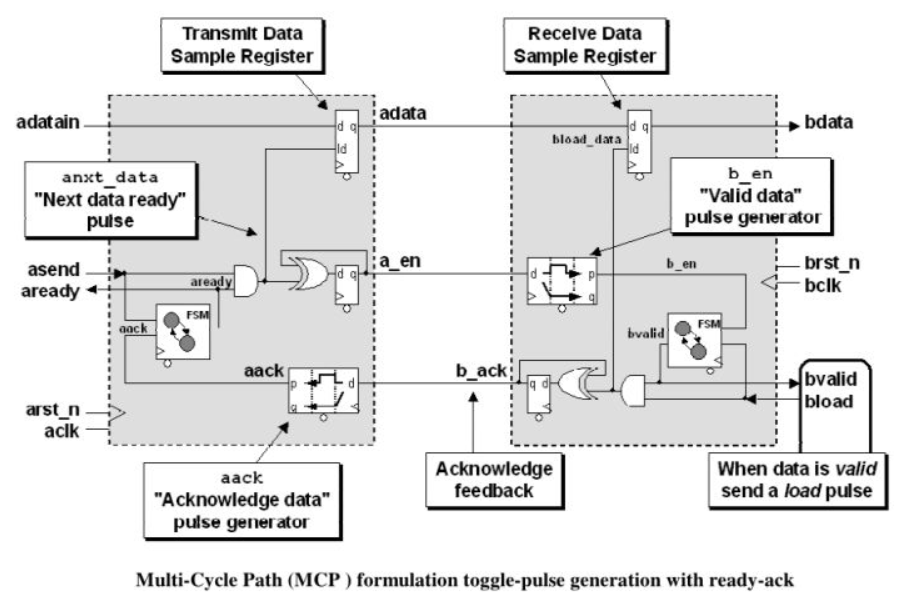
带应答反馈的MCP
电路图如下:
多周期路径法的思想十分有用,但是实际中用来传递多位信号比较少见,因为逻辑过于复杂。但是MCP方法用来传递单bit的信号却十分有用。这里就不展开讲了,有兴趣的可以参考最后的参考文档中的描述。
下面是一种利用MCP思想进行跨时钟处理脉冲,不用考虑源时钟信号宽度的代码:
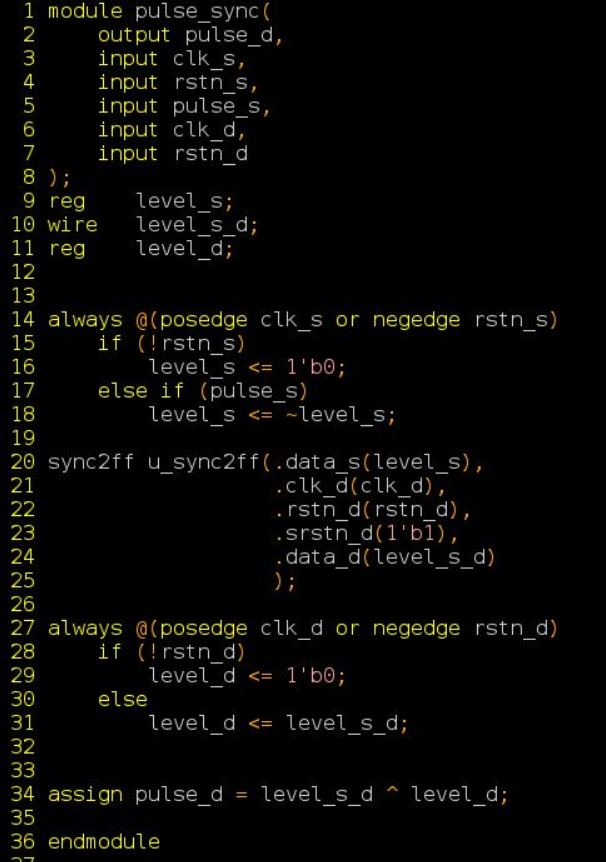
限制就算输入脉冲不能相隔太近,否则会丢掉中间的脉冲。
格雷码
对于计数器的CDC, 大部分是不必要的。如果一定需要,那么可以使用格雷码。
格雷码每次只允许更改一个位,从而消除了跨时钟域同步更改多个CDC位所带来的问题。
格雷码和二进制码之间的转换是一种很成熟的技术,很容易就能找到现成的代码,这里就不在详细描述。
需要注意的是:格雷码必须是计数到2^n才是每次改变一个bit。
如果计数器是从0~5计数,那么从5->0的计数,不止一个bit改变,就失去了只改变一个bit的初衷。
格雷码最常见的应用是在异步FIFO中,通常异步FIFO的深度都是2^N,原因就是上面说的。所以,就算浪费面积,也需要把FIFO深度设置为2^N。
通过AFIFO进行多位信号CDC
多位信号CDC的工程上的一般做法都是采用异步FIFO, 异步FIFO的设计请参考:
“Clifford E. Cummings: Simulation and Synthesis Techniques for Asynchronous FIFO Design with Asynchronous Pointer Comparisons”
这篇文章,里面写的十分清楚,而且给出了详细的RTL代码,可以直接使用。把这篇文章搞懂了,AFIFO的知识点基本就清楚了。AFIFO的设计也是芯片设计的基本功,一定要弄清楚。
这里有一个特殊的应用,那就是深度为2的AFIFO,来进行多bit数据的CDC. 如下图所示:
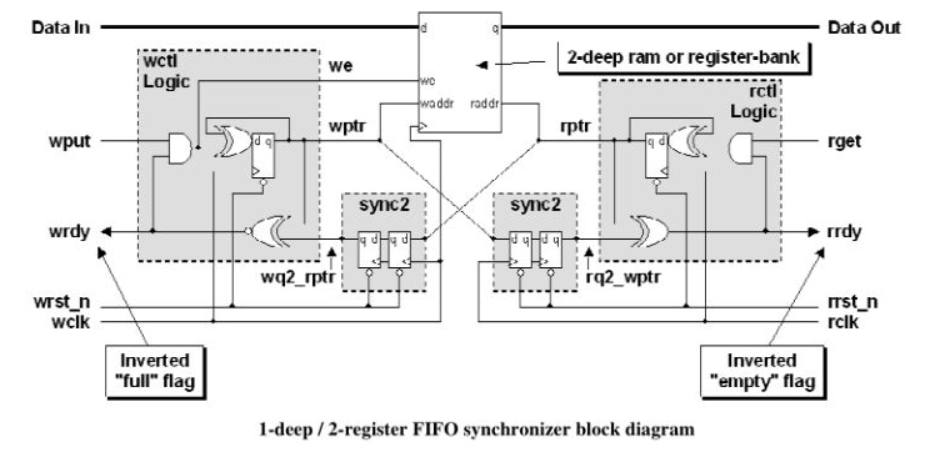
2个寄存器搭建的AFIFO,地址只需要一位。相比MCP方法,逻辑简单,可以复用AFIFO代码(一般公司都有芯片验证过的AFIFO代码),而且延时也比MCP方法小。
所以多bit仅仅跨时钟域,不需要进行数据吞吐率匹配(FIFO的重要功能之一)的情况,推荐用深度为2的AFIFO来实现,而不是MCP方法。
总结
CDC问题是芯片失败的最常见的问题之一,弄清楚CDC方法也是芯片设计的最重要的事情。常见的CDC方法总结如下:
- 推荐的1-bt CDC技术:
- 慢时钟到快时钟:同步器;
- 快时钟到慢时钟:MCP方法
- 推荐的multi-bit CDC 技术:
- 多个信号合成一个信号。
- MCP方法(其实用的很少,但是设计思想很好)
- AFIFO
- 2-Depth AFIFO