随机路标图-Probabilistic Roadmaps (路径规划算法)
路径规划作为机器人完成各种任务的基础,一直是研究的热点。研究人员提出了许多规划方法如:
1. A*
2. Djstar
3. D*
4. 随机路标图(PRM)法
5. 人工势场法
6. 单元分解法
7. 快速搜索树(RRT)法等
传统的人工势场、单元分解法需要对空间中的障碍物进行精确建模,当环境中的障碍物较为复杂时,将导致规划算法计算量较大。
基于 随机采样技术 的 PRM法 可以有效解决 “高维空间” 和 “复杂约束” 中的路径规划问题。
1. 简介

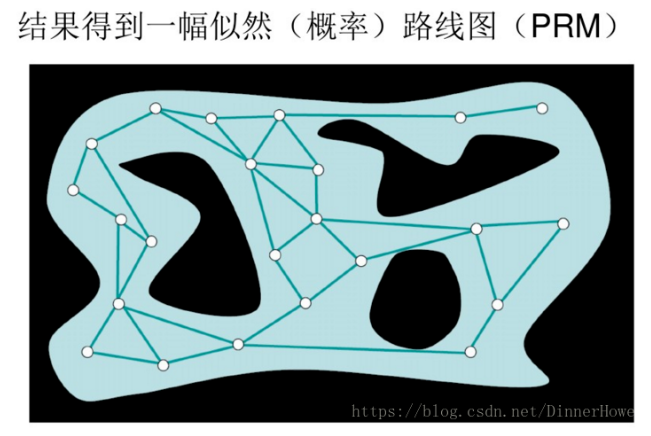
如上图所示,PRM(Probabilistic Roadmaps) 是一种基于图搜索的方法,一共分为两个步骤:学习阶段, 查询阶段
它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
这种方法能用相对少的随机采样点来找到一个解,对多数问题而言,相对少的样本足以覆盖大部分可行的空间,并且找到路径的概率为1(随着采样数增加,P(找到一条路径)指数的趋向于1)。显然,当采样点太少,或者分布不合理时,PRM算法是不完备的,但是随着采用点的增加,也可以达到完备。所以PRM是概率完备且不最优的。
用随机路径图(PRM)法寻找给定地图中两点之间的路径,PRM进行路径规划的步骤:
(1)学习阶段:
在给定图的自由空间里随机撒点(自定义个数),构建一个路径网络图。
a)构造步骤
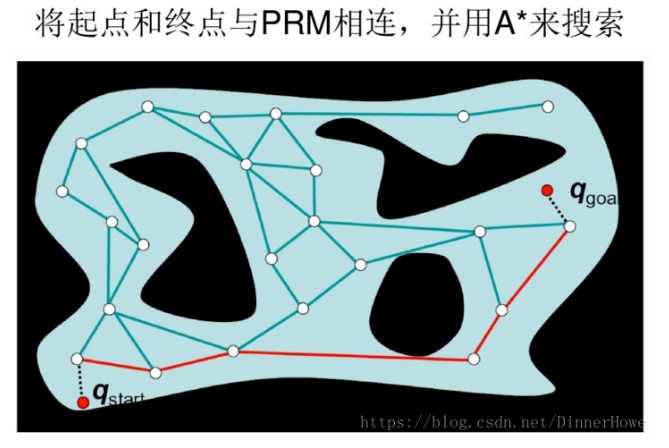
b)扩张步骤(2)查询阶段:
查询从一个起点到一个终点的路径。
a)局部路径规划
b)距离计算
c)碰撞检查
2. 详解
2.1 PRM学习阶段
PRM学习阶段包含两部分内容:
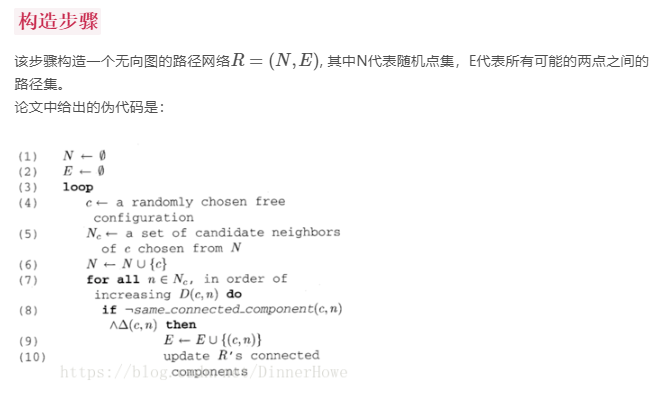
文字说明
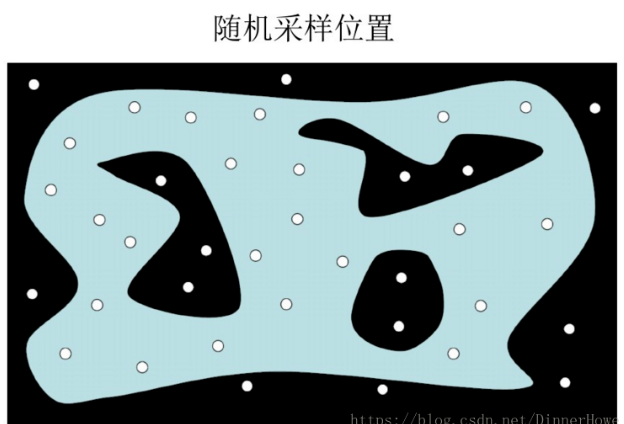
步骤 1~2 : 初始化两个集合,其中N:随机点集,E:路径集。步骤 4 : 随机撒点,将撒的点放入N中,随机撒点的过程中:
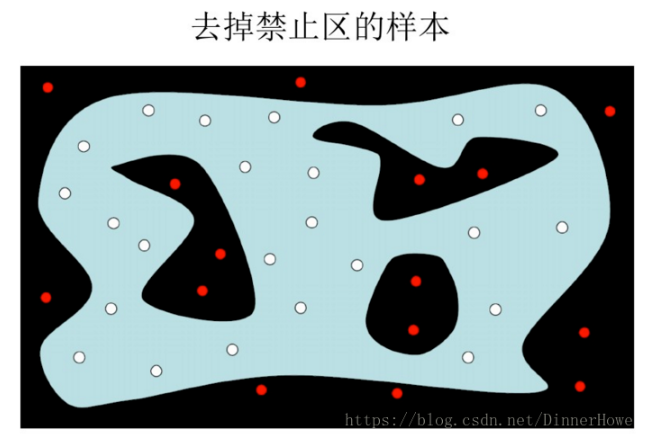
1. 必须是自由空间的随机点
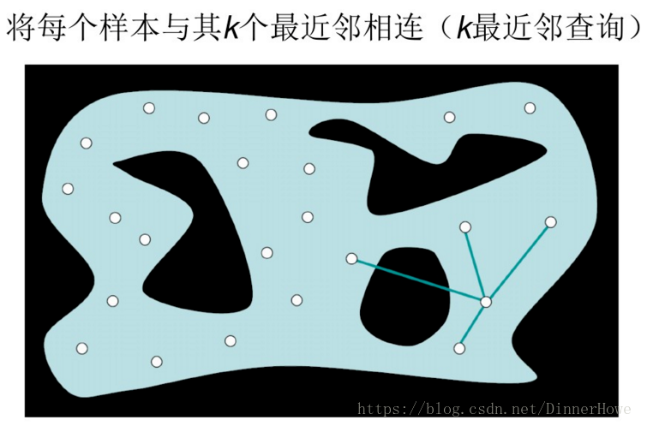
2. 每个点都要确保与障碍物无碰撞步骤 5~8 :对每一个新的节点c,我们从当前N中选择一系列的相邻点n,并且使用local planner进行路径规划
步骤 9~10 :将可行驶的路径的边界(c,n)加入到E集合中,不可行的路径去掉。
图片说明

扩张步骤
参考:
Kavraki, L.E., P. Svestka, J.-C. Latombe, and M.H. Overmars. “Probabilistic roadmaps for path planning in high-dimensional configuration spaces,” IEEE Transactions on Robotics and Automation. Vol. 12, No. 4, Aug 1996 pp. 566—580.
http://www.cnblogs.com/21207-iHome/p/6049259.html
endl;
参考博客:
https://blog.csdn.net/DinnerHowe/article/details/80267062?tdsourcetag=s_pctim_aiomsg