Review
Activation Functions. Sigmoid, tanh, ReLU(good default choice).
Optimization
- Optimization algorithms
- SGD. Problems: jitering or stop at saddle point or local minima, noisy.
- SGD + Momentum. Use velocity as a running mean of gradients, and use velocity instead of minibatch gradient to curve the noise and solve the problem of local minima and saddle points. Rho: gives "friction". Key Idea: Velocity, Curve sensitive.

- Nesterov Momentum. $v_{t+1}= ho v_t-alpha abla f(x_t+ ho v_t)$, substitute variable to rearrange the equation, thus loss function and gradient will have the same input.
- AdaGrad. Added element-wise scaling of the gradient based on the historical sum of squares in each dimension. On implementation, +eps in case of dividing by zero. Why AdaGrad: think about small gradient dimension and wiggling dimention. Good for convex optimization but bad when we have saddle points. Not commonly used for DNN cases.
- RMSProp. Based on AdaGrad, solve the problem of smaller and smaller steps overtime. Key Idea: Making grad_squared decay.
- Adam (Almost). maintain momentum(velocity) and scaling momentum(grad_squared) both (Momentum + AdaGrad/RMSProp), Problem: big first step.
- Adam. plus bias correction. use an iteration count, and subtract the friction exponentially from 1 to make beginning steps small.
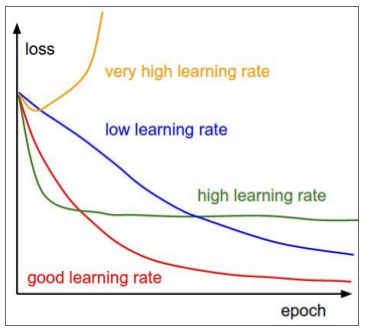
- pick a learning rate
- Tricky trial: Adam, beta1 = 0.9, beta2 = 0.999, lr = 1e-3 or 5e-4
- Learning rate decay. step decay, exponential decay $alpha = alpha_0e^{-kt}$. 1/t decay, $alpha = alpha_0 / (1 + kt)$. Common for SGD-momentum, less common for Adam.
- lr decay is like a second order optimiztion, it will be very tricky, so start with no decay and see the loss map, then to decide whether to use decay or not.
- Second-Order Optimization
- Impractical
- Model Ensembles
- Train and Average multiple independent models
- Polyak averaging
Regularization
- L2, L1, Elastic (combining L2 and L1)
- Dropout
- Why make sense?
- Forces the network to have a redundant representation;
- Prevents co-adaptation of features
or - Dropout is training a large ensemble of models (with shared parameters)
- Dropout: Test time. At test time, to approximate the dropout behavior during the training time, we multiply the input (activation) of a nueron by the dropout probability.
- More common: “Inverted dropout”. scale the activation during training so that at test time everything keeps unchanged.
Regularization strategy (common pattern) : randomness during training and average out randomness during test time.
- Why make sense?
- Example: BN
- Data Augmentation
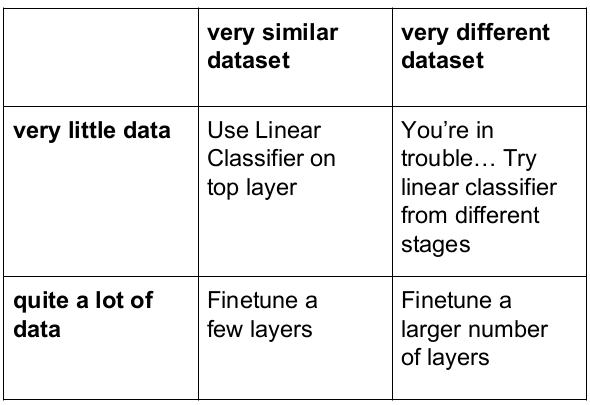
Transfer Learning
Don't train a nn from scratch, instead, use pretrained model as feature extractor, and