一、驱动器接线
1.1驱动器接口:
驱动器接线,需要连接两个接口,一个是反馈接口,一个是STO接口。
反馈接口,我这里使用了elmo驱动器的Port A。这个接口提供5v电源。并且可以输入旋转编码器和霍尔传感器。接口定义如下。其中2口为GND。

图1 Port A接口定义
STO接口的1、2两个口接5V或24V,我接了24V。3口接GND。
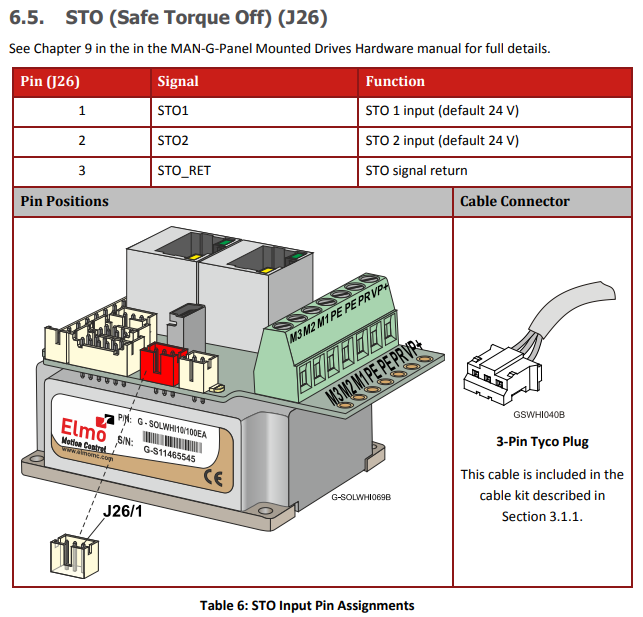
图2 STO接口定义
1.2电机接口
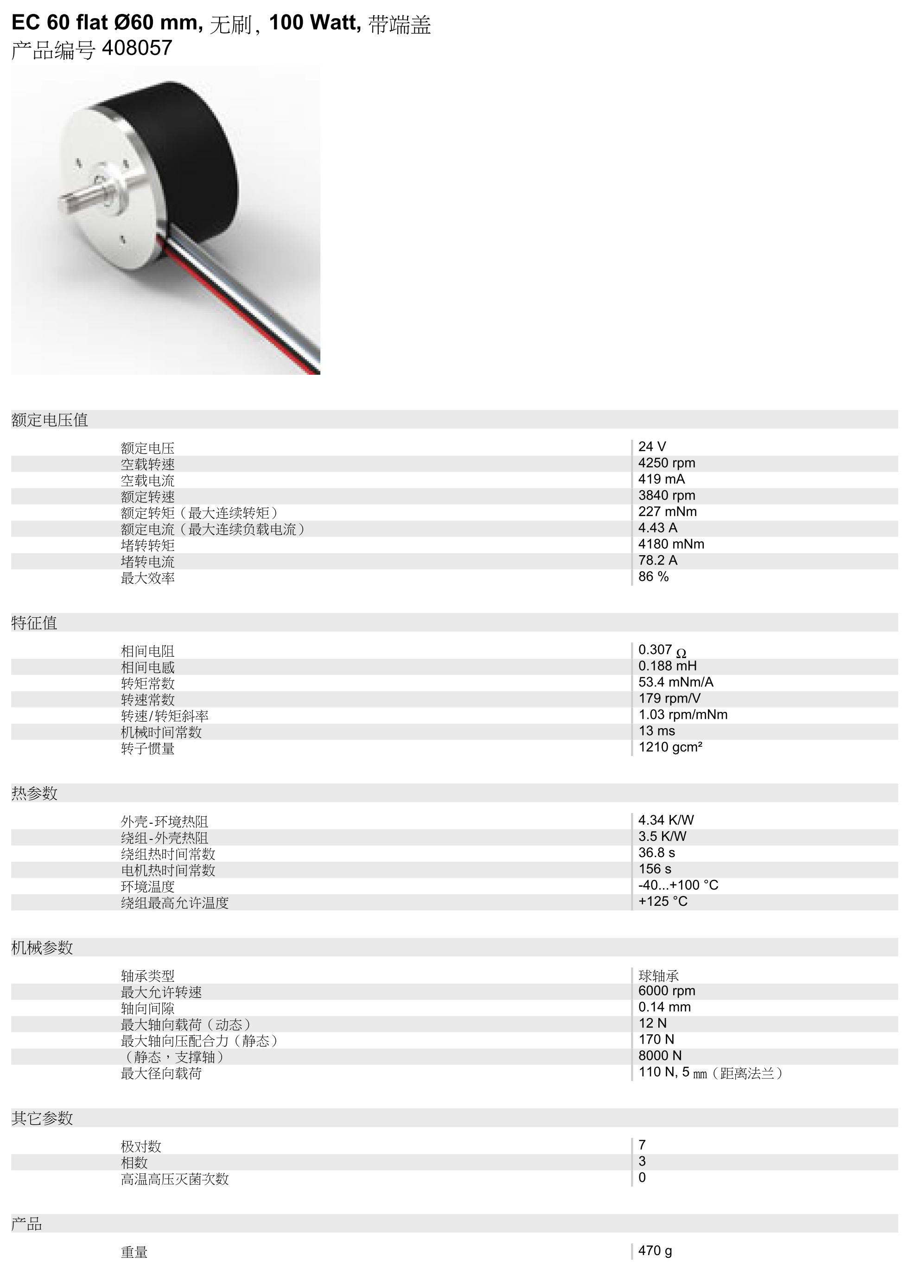
电机型号为maxton 470469
电机线:Motor winding 1/2/3对应
编码器线:
图3电机线上1-9根,从左到右分别为图4编码器接口定义的2-10。
图3电机线上10-14根,从左到右分别为图5霍尔传感器定义的1-5。
根据电机线定义和Elmo接口重新接线。
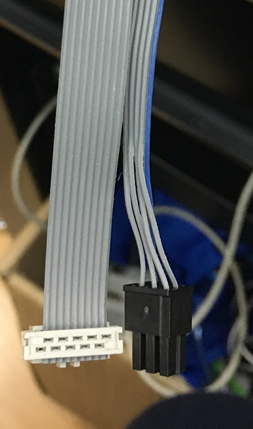
图3 电机线
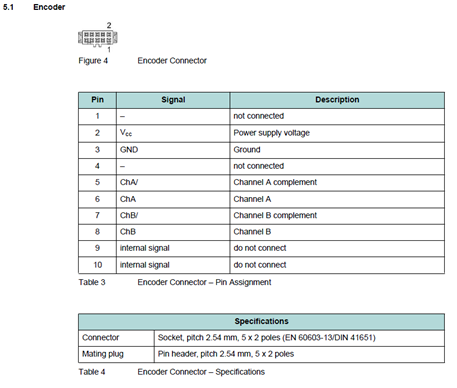
图4 编码器接口定义
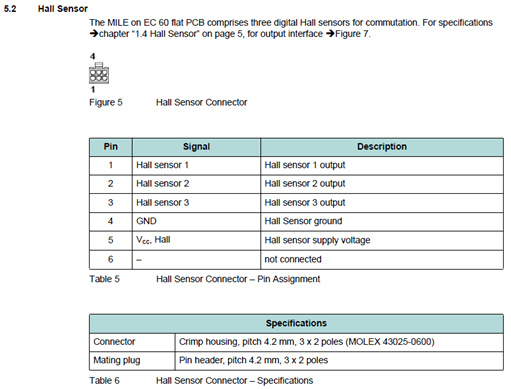
图5 霍尔传感器接口定义
二、驱动器配置 EAS II
这里使用的EAS II驱动器安装包为Elmo+Application+Studio+II+Setup+2.3.1.4.exe。
官网下载比较复杂,这里提供一个百度云盘下载地址:链接: https://pan.baidu.com/s/1nwJMQiX 密码: fjvf
2.1驱动器连接
第一步,驱动器接线完成后,接通elmo的24V电源,将elmo通过mini-usb连接到电脑usb口,自动搜索安装串口驱动。若失败,可通过备份的驱动添加。
备份驱动下载地址:链接: https://pan.baidu.com/s/1b_goLhu_GmLBm4kK9aanUw 密码: j8jq
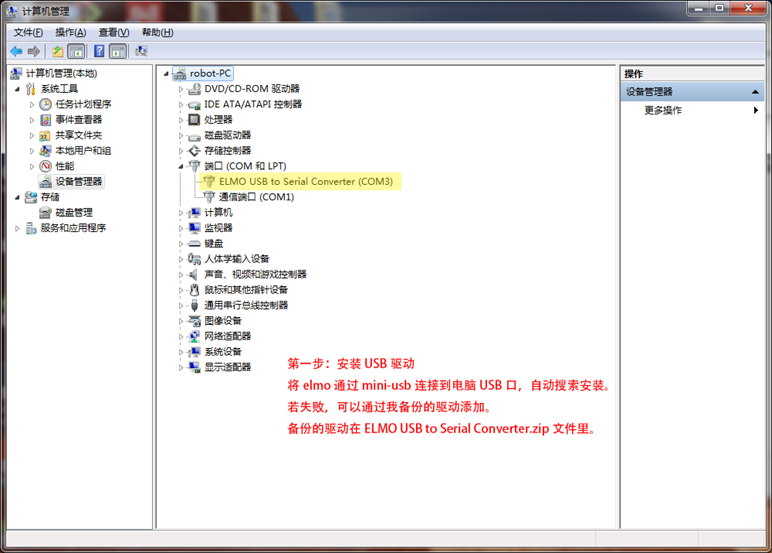
驱动安装完成后,使用EAS II连接驱动器。按照图片中的指示操作。
第二步:添加驱动器到工作空间。在工作空间右键,选择Add Gold Driver。

新建驱动器(Driver03)如图所示,前面两个为之前新建过的。

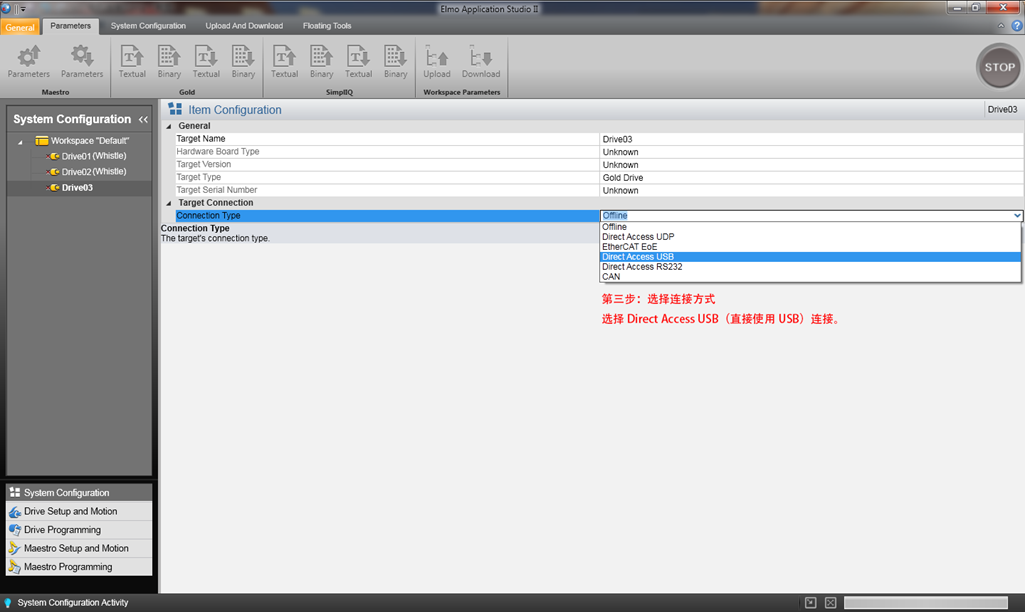
第三步:在Driver03里,选择目标连接方式,选择Direct Access USB(直接使用USB)连接。
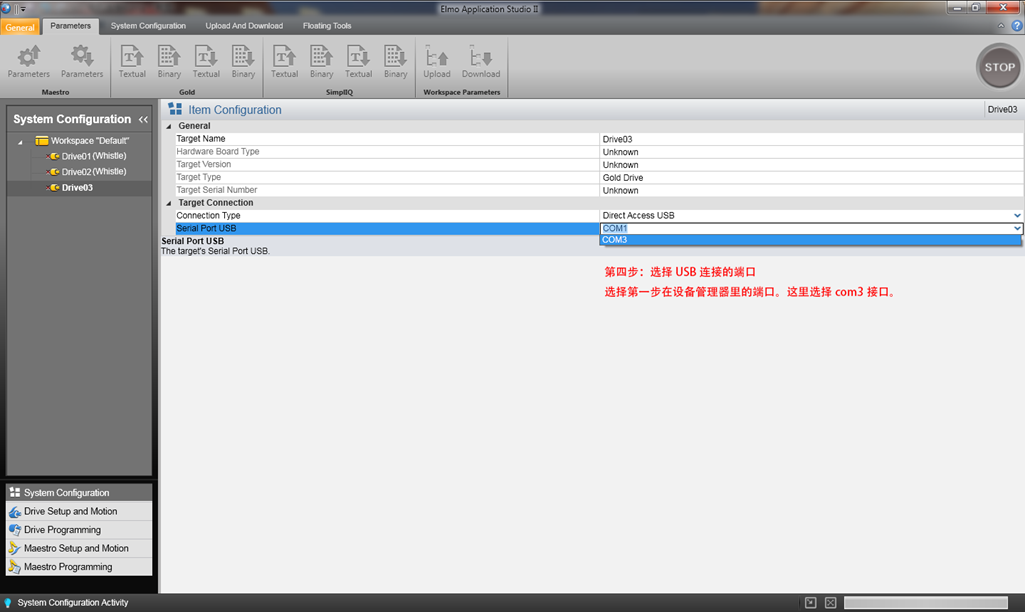
第四步:选择USB连接的端口。选择第一步在设备管理器里的端口,这里选择com3接口。
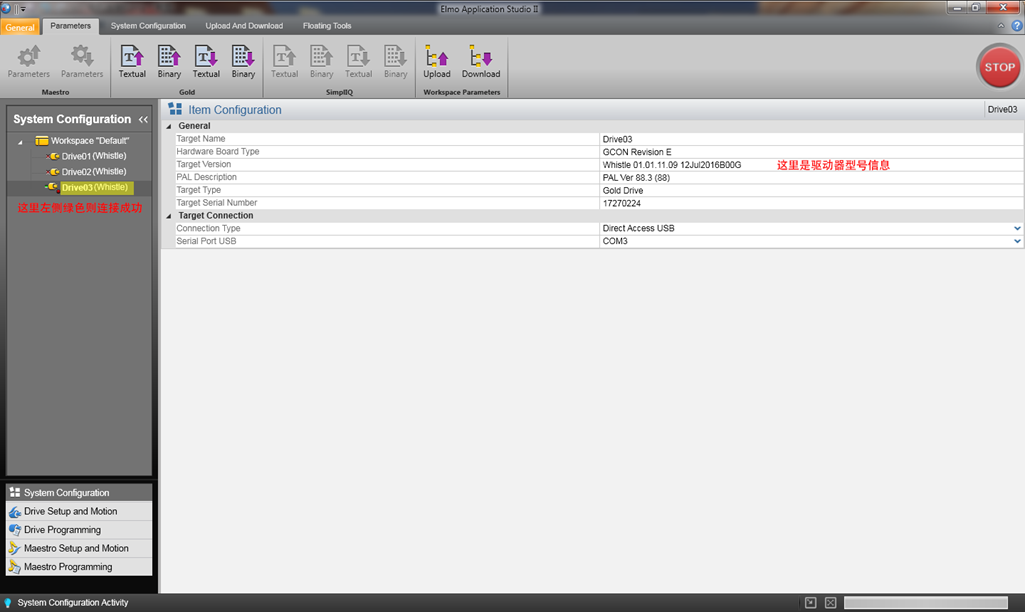
第五步:连接驱动器。在右侧系统设置的工作区里,邮件Driver03,选择connect。

Driver03左侧绿色则表示连接成功,同时可以在右侧看到驱动器型号信息。
2.2电机配置
电机参数如下
减速箱参数:

电机参数:
编码器参数:

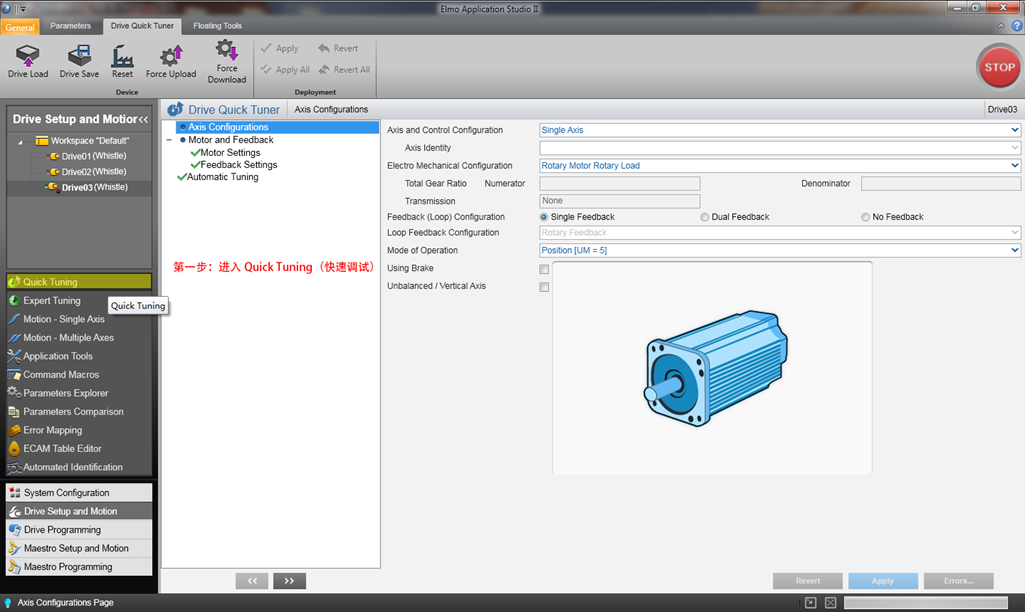
电机连接成功后,进入Driver Setup and Motion界面。配置驱动器参数。

第一步:进入Quick Tuning
第二步:配置电机参数。配置之后记得apply。根据图片中的内容填入,在这里,Peak Current应大于等于Continuous Stall Current。Continuous Stall Current这个具体的中文意思我翻译的有问题。

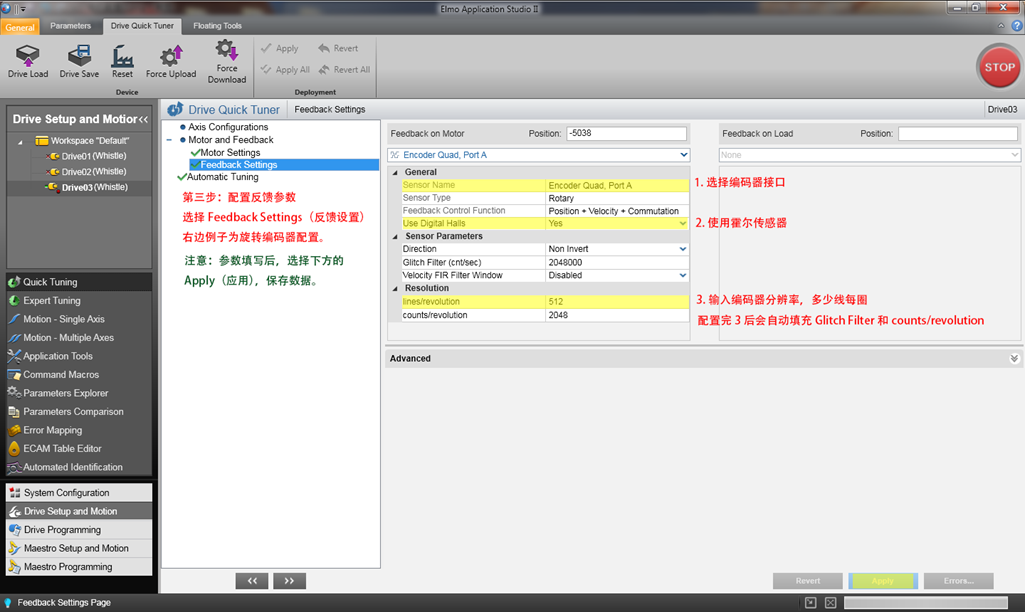
第三步:配置反馈参数,具体参考图片。
Lines/revolution是编码器旋转一周线数。Counts/revolution是旋转一周计数,包括a/b两个通道的上升沿和下降沿。Gitch Filter是最大转速时每秒钟计数,包括a/b两个通道的上升沿和下降沿。
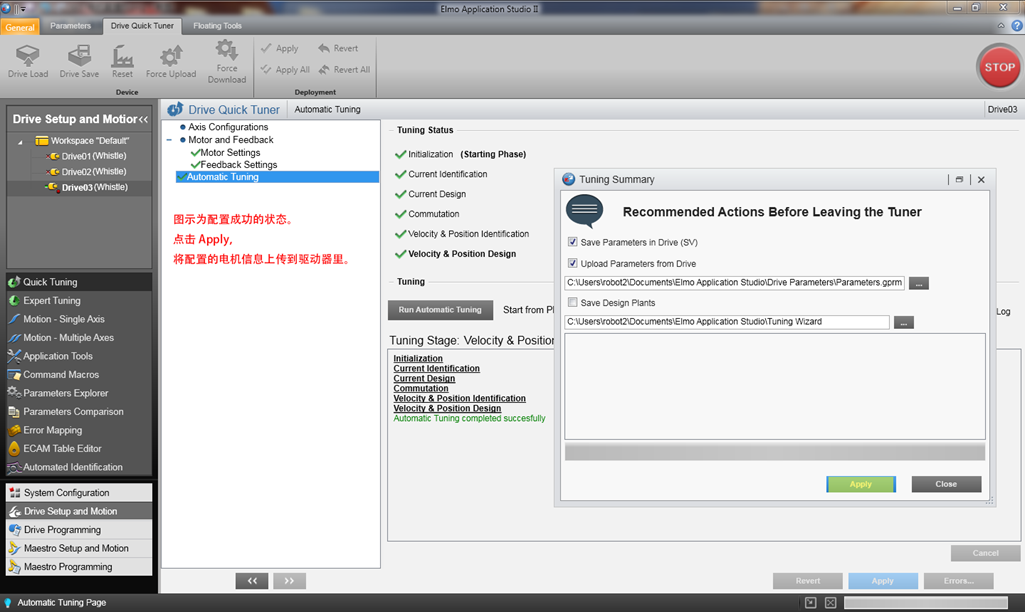
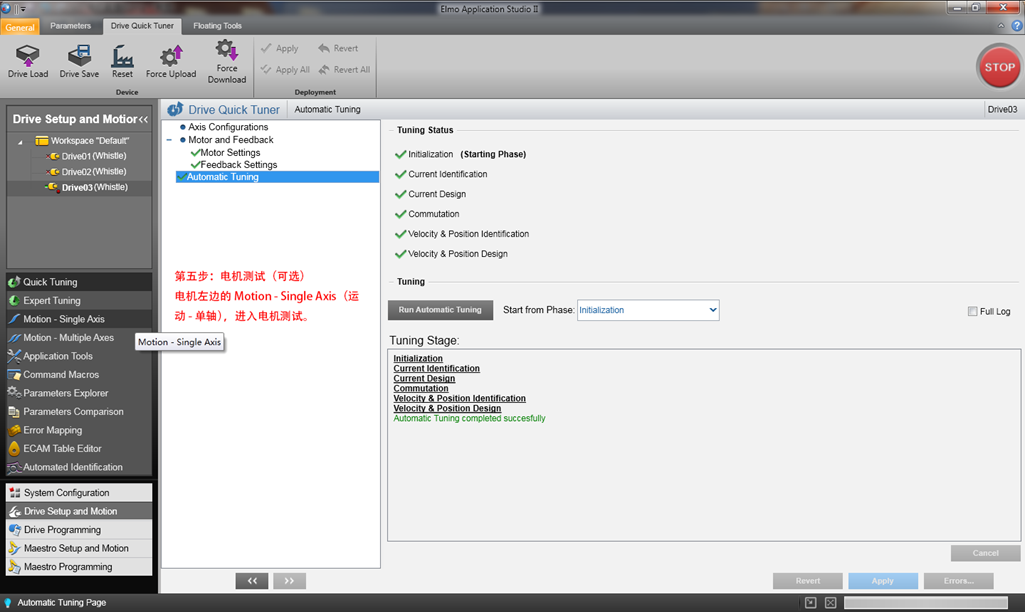
第四步:进行自动调试。自动调试时电机会转动,这里我测试到的电机小幅度移动是因为减速箱减速比大,而我只观察了经过减速的电机转轴,电机的实际转动超过一圈。

配置成功后如下图所示。
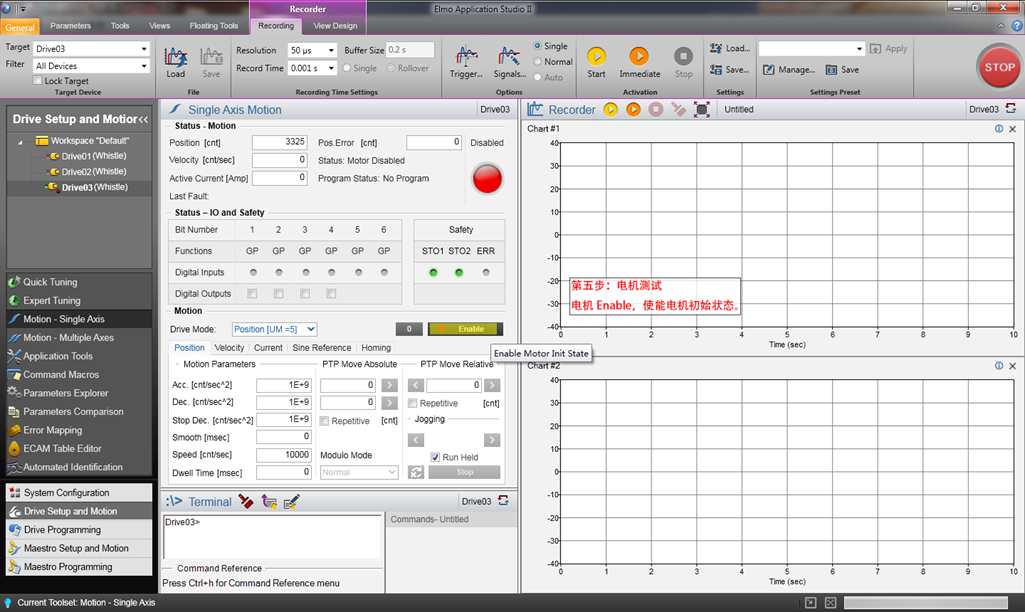
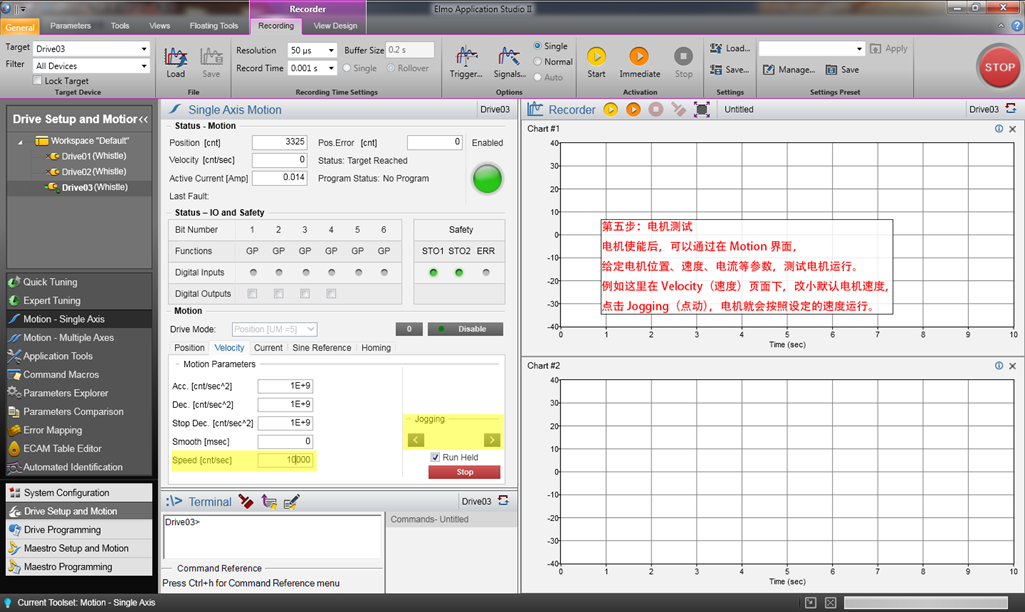
2.3(可选)电机测试
配置成功后可在EAS里直接控制电机转动,进行测试。
链接: https://pan.baidu.com/s/1b_goLhu_GmLBm4kK9aanUw 密码: j8jq