安装配置方法参照 http://wiki.ros.org/indigo/Installation/Ubuntu
以下操作需要保证虚拟机能够正常连接网络。
1.更换源镜像:


将源设置为国内源,我选择的是"mirrors.aliyun.com",
你也可以选择其他的,从"China"中任意选择一个可以正常使用的便可。

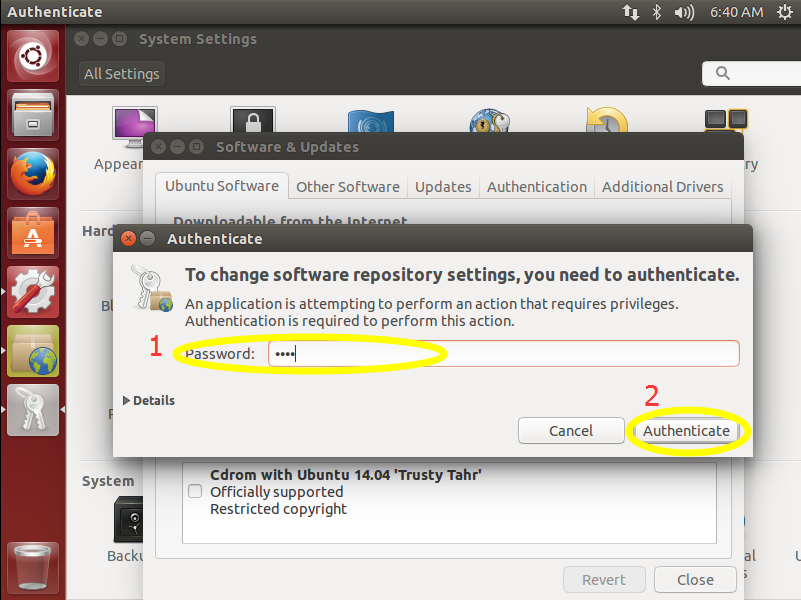
这里要求输入的密码即为你的用户登录密码:


等待更新完毕:

如果更新过程中出现问题,则重新从"China"中选择其他的源。
至此,源镜像便更换完毕。
在此之前,为了节省输入命令的时间,可先安装好VMware Tools,从而实现直接将主机中的文件内容复制黏贴到虚拟机中的功能,VMwaer Tools详细安装方法可参照 VMware Tools安装方法及共享文件夹设置方法
按Ctrl"+"Alt"+"T",调出终端命令行,执行以下命令(正确安装好VMware Tools后可直接从主机将命令复制黏贴到虚拟机终端):
黏贴到命令行的方法:点击鼠标右键,选择"Paste"


2.设置源地址:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.添加密钥:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
4.更新源列表:
sudo apt-get update
5.安装
sudo apt-get install ros-indigo-desktop-full
6.初始化rosdep依次执行以下两条命令:
sudo rosdep init
rosdep update
7.设置环境变量
依次执行以下两条命令:
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
8.获取 rosinstall
sudo apt-get install python-rosinstall
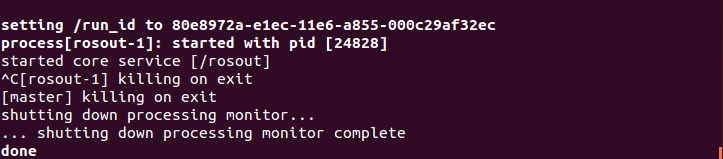
9.测试
在终端命令行执行 roscore,如果出现以下内容说明ROS安装成功