本文作者:hhh5460
本文地址:https://www.cnblogs.com/hhh5460/p/10143579.html
感谢pengdali,本文的 class Maze 参考了他的博客,地址:https://blog.csdn.net/pengdali/article/details/79369966
0.问题情境
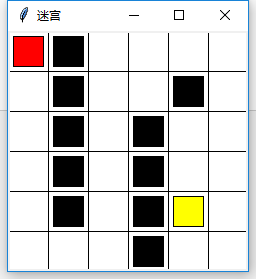
一个6*6的迷宫,左上角入口,右下角出口。红色矩形为玩家,黑色矩形为陷阱,黄色矩形为元宝。如图
1.问题分析
将二维问题转化为一维问题,并解决之。
状态集:[0,1,..,35],0~35,共36个。
动作集:['u', 'd', 'l', 'r'],上下左右,共4个。
奖励集:[0,-10,0,0,...,10],每个位置一个奖励值,共36个。其中空白位置0,陷阱-10,元宝3,出口10(随便)
那么,接下来需要从上三个集合中选择相应的元素或子集,用一维的方式比二维的方式更简便。其方法与前面的例子是类似的,只需要改变首末两行、两列的值即可!这里不细说了。
2.完整代码
import pandas as pd import random import time import pickle import pathlib import os import tkinter as tk ''' 6*6 的迷宫: ------------------------------------------- | 入口 | 陷阱 | | | | | ------------------------------------------- | | 陷阱 | | | 陷阱 | | ------------------------------------------- | | 陷阱 | | 陷阱 | | | ------------------------------------------- | | 陷阱 | | 陷阱 | | | ------------------------------------------- | | 陷阱 | | 陷阱 | 元宝 | | ------------------------------------------- | | | | 陷阱 | | 出口 | ------------------------------------------- 作者:hhh5460 时间:20181219 地点:Tai Zi Miao ''' class Maze(tk.Tk): '''环境类(GUI)''' UNIT = 40 # pixels MAZE_H = 6 # grid height MAZE_W = 6 # grid width def __init__(self): '''初始化''' super().__init__() self.title('迷宫') h = self.MAZE_H * self.UNIT w = self.MAZE_W * self.UNIT self.geometry('{0}x{1}'.format(h, w)) #窗口大小 self.canvas = tk.Canvas(self, bg='white', height=h, width=w) # 画网格 for c in range(0, w, self.UNIT): self.canvas.create_line(c, 0, c, h) for r in range(0, h, self.UNIT): self.canvas.create_line(0, r, w, r) # 画陷阱 self._draw_rect(1, 0, 'black') self._draw_rect(1, 1, 'black') self._draw_rect(1, 2, 'black') self._draw_rect(1, 3, 'black') self._draw_rect(1, 4, 'black') self._draw_rect(3, 2, 'black') self._draw_rect(3, 3, 'black') self._draw_rect(3, 4, 'black') self._draw_rect(3, 5, 'black') self._draw_rect(4, 1, 'black') # 画奖励 self._draw_rect(4, 4, 'yellow') # 画玩家(保存!!) self.rect = self._draw_rect(0, 0, 'red') self.canvas.pack() # 显示画作! def _draw_rect(self, x, y, color): '''画矩形, x,y表示横,竖第几个格子''' padding = 5 # 内边距5px,参见CSS coor = [self.UNIT * x + padding, self.UNIT * y + padding, self.UNIT * (x+1) - padding, self.UNIT * (y+1) - padding] return self.canvas.create_rectangle(*coor, fill = color) def move_to(self, state, delay=0.01): '''玩家移动到新位置,根据传入的状态''' coor_old = self.canvas.coords(self.rect) # 形如[5.0, 5.0, 35.0, 35.0](第一个格子左上、右下坐标) x, y = state % 6, state // 6 #横竖第几个格子 padding = 5 # 内边距5px,参见CSS coor_new = [self.UNIT * x + padding, self.UNIT * y + padding, self.UNIT * (x+1) - padding, self.UNIT * (y+1) - padding] dx_pixels, dy_pixels = coor_new[0] - coor_old[0], coor_new[1] - coor_old[1] # 左上角顶点坐标之差 self.canvas.move(self.rect, dx_pixels, dy_pixels) self.update() # tkinter内置的update! time.sleep(delay) class Agent(object): '''个体类''' def __init__(self, alpha=0.1, gamma=0.9): '''初始化''' self.states = range(36) # 状态集。0~35 共36个状态 self.actions = list('udlr') # 动作集。上下左右 4个动作 self.rewards = [0,-10,0, 0, 0, 0, 0,-10,0, 0,-10, 0, 0,-10,0,-10, 0, 0, 0,-10,0,-10, 0, 0, 0,-10,0,-10, 3, 0, 0, 0,0,-10, 0,10,] # 奖励集。出口奖励10,陷阱奖励-10,元宝奖励5 self.hell_states = [1,7,13,19,25,15,31,37,43,10] # 陷阱位置 self.alpha = alpha self.gamma = gamma self.q_table = pd.DataFrame(data=[[0 for _ in self.actions] for _ in self.states], index=self.states, columns=self.actions) def save_policy(self): '''保存Q table''' with open('q_table.pickle', 'wb') as f: # Pickle the 'data' dictionary using the highest protocol available. pickle.dump(self.q_table, f, pickle.HIGHEST_PROTOCOL) def load_policy(self): '''导入Q table''' with open('q_table.pickle', 'rb') as f: self.q_table = pickle.load(f) def choose_action(self, state, epsilon=0.8): '''选择相应的动作。根据当前状态,随机或贪婪,按照参数epsilon''' #if (random.uniform(0,1) > epsilon) or ((self.q_table.ix[state] == 0).all()): # 探索 if random.uniform(0,1) > epsilon: # 探索 action = random.choice(self.get_valid_actions(state)) else: #action = self.q_table.ix[state].idxmax() # 利用 当有多个最大值时,会锁死第一个! #action = self.q_table.ix[state].filter(items=self.get_valid_actions(state)).idxmax() # 重大改进!然鹅与上面一样 s = self.q_table.ix[state].filter(items=self.get_valid_actions(state)) action = random.choice(s[s==s.max()].index) # 从可能有多个的最大值里面随机选择一个! return action def get_q_values(self, state): '''取给定状态state的所有Q value''' q_values = self.q_table.ix[state, self.get_valid_actions(state)] return q_values def update_q_value(self, state, action, next_state_reward, next_state_q_values): '''更新Q value,根据贝尔曼方程''' self.q_table.ix[state, action] += self.alpha * (next_state_reward + self.gamma * next_state_q_values.max() - self.q_table.ix[state, action]) def get_valid_actions(self, state): '''取当前状态下所有的合法动作''' valid_actions = set(self.actions) if state % 6 == 5: # 最后一列,则 valid_actions -= set(['r']) # 无向右的动作 if state % 6 == 0: # 最前一列,则 valid_actions -= set(['l']) # 无向左 if state // 6 == 5: # 最后一行,则 valid_actions -= set(['d']) # 无向下 if state // 6 == 0: # 最前一行,则 valid_actions -= set(['u']) # 无向上 return list(valid_actions) def get_next_state(self, state, action): '''对状态执行动作后,得到下一状态''' #u,d,l,r,n = -6,+6,-1,+1,0 if state % 6 != 5 and action == 'r': # 除最后一列,皆可向右(+1) next_state = state + 1 elif state % 6 != 0 and action == 'l': # 除最前一列,皆可向左(-1) next_state = state - 1 elif state // 6 != 5 and action == 'd': # 除最后一行,皆可向下(+2) next_state = state + 6 elif state // 6 != 0 and action == 'u': # 除最前一行,皆可向上(-2) next_state = state - 6 else: next_state = state return next_state def learn(self, env=None, episode=1000, epsilon=0.8): '''q-learning算法''' print('Agent is learning...') for i in range(episode): current_state = self.states[0] if env is not None: # 若提供了环境,则重置之! env.move_to(current_state) while current_state != self.states[-1]: current_action = self.choose_action(current_state, epsilon) # 按一定概率,随机或贪婪地选择 next_state = self.get_next_state(current_state, current_action) next_state_reward = self.rewards[next_state] next_state_q_values = self.get_q_values(next_state) self.update_q_value(current_state, current_action, next_state_reward, next_state_q_values) current_state = next_state #if next_state not in self.hell_states: # 非陷阱,则往前;否则待在原位 # current_state = next_state if env is not None: # 若提供了环境,则更新之! env.move_to(current_state) print(i) print(' ok') def test(self): '''测试agent是否已具有智能''' count = 0 current_state = self.states[0] while current_state != self.states[-1]: current_action = self.choose_action(current_state, 1.) # 1., 贪婪 next_state = self.get_next_state(current_state, current_action) current_state = next_state count += 1 if count > 36: # 没有在36步之内走出迷宫,则 return False # 无智能 return True # 有智能 def play(self, env=None, delay=0.5): '''玩游戏,使用策略''' assert env != None, 'Env must be not None!' if not self.test(): # 若尚无智能,则 if pathlib.Path("q_table.pickle").exists(): self.load_policy() else: print("I need to learn before playing this game.") self.learn(env, episode=1000, epsilon=0.5) self.save_policy() print('Agent is playing...') current_state = self.states[0] env.move_to(current_state, delay) while current_state != self.states[-1]: current_action = self.choose_action(current_state, 1.) # 1., 贪婪 next_state = self.get_next_state(current_state, current_action) current_state = next_state env.move_to(current_state, delay) print(' Congratulations, Agent got it!') if __name__ == '__main__': env = Maze() # 环境 agent = Agent() # 个体(智能体) #agent.learn(env, episode=1000, epsilon=0.6) # 先学习 #agent.save_policy() #agent.load_policy() agent.play(env) # 再玩耍 #env.after(0, agent.learn, env, 1000, 0.8) # 先学 #env.after(0, agent.save_policy) # 保存所学 #env.after(0, agent.load_policy) # 导入所学 #env.after(0, agent.play, env) # 再玩 env.mainloop()
重大改进:Agent.choose_action()。之前贪婪的时候直接用idxmax(),会锁死第一个最大值对应的方向!