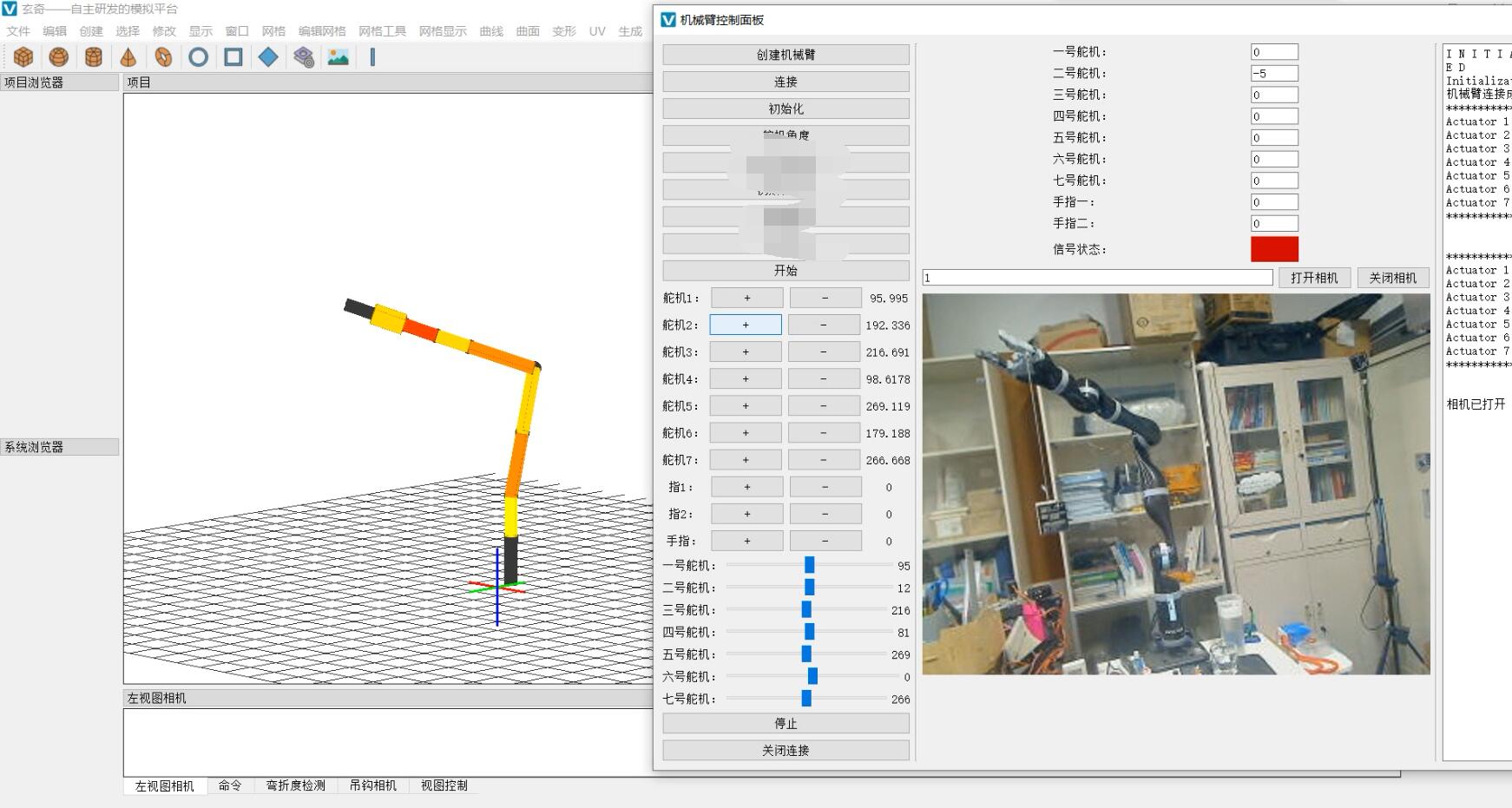
基于kinova jaco2机械臂的仿真模拟
struct AngularInfo { /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the first actuator. Unit depends on the context it's been used. */ float Actuator1; /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the second actuator. Unit depends on the context it's been used. */ float Actuator2; /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the third actuator. Unit depends on the context it's been used. */ float Actuator3; /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the actuator #4. Unit depends on the context it's been used. */ float Actuator4; /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the actuator #5. Unit depends on the context it's been used. */ float Actuator5; /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the actuator #6. Unit depends on the context it's been used. */ float Actuator6; /** * As an example if the current control mode is angular position the unit will be degree but if the control mode is angular velocity * then the unit will be degree per second. * @brief This is the value related to the actuator #7. Unit depends on the context it's been used. */ float Actuator7; /** * This method will initialises all the values to 0 */ void InitStruct() { Actuator1 = 0.0f; Actuator2 = 0.0f; Actuator3 = 0.0f; Actuator4 = 0.0f; Actuator5 = 0.0f; Actuator6 = 0.0f; Actuator7 = 0.0f; } };
//That is a device you can communicate with via this library. struct KinovaDevice { //The serial number of the device. If you are communicating with more than 1 device, this will be used to identify //the devices. char SerialNumber[SERIAL_LENGTH]; //The model of the device. char Model[SERIAL_LENGTH]; //Those variables represents the code version - Major.Minor.Release int VersionMajor; int VersionMinor; int VersionRelease; //The type of the device. int DeviceType; //This is a device ID used by the API. User should not use it. int DeviceID; };
########################################