- part1 人类的视觉感知系统
1.1)视觉系统的基本构造
眼睛中的光接受器提供了像。光接受器主要包括锥状体和杆状体,它们位于视网膜的中间部分,称为中央凹。
锥状体具有辨别光波波长的能力,对颜色十分敏感,也被称为白昼视觉。
杆状体比锥状体的灵敏度高,在较暗的光线下就能起作用,没有辨别颜色的能力,也被称为夜视觉。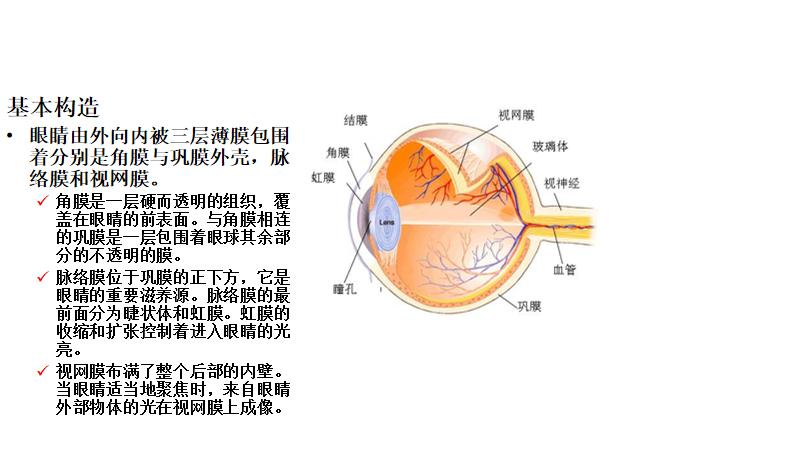
眼睛中的光接受器提供了像。光接受器主要包括锥状体和杆状体,它们位于视网膜的中间部分,称为中央凹。
锥状体具有辨别光波波长的能力,对颜色十分敏感,也被称为白昼视觉。
杆状体比锥状体的灵敏度高,在较暗的光线下就能起作用,没有辨别颜色的能力,也被称为夜视觉。
眼睛的的晶状体的形状由睫状体韧带和张力来控制,为了对远方的物体聚焦,控制肌肉使晶状体相对比较扁平。同样为了对眼睛近处的物体聚焦,肌肉会使晶状体变得较厚。
晶状体中心和视网膜沿视轴的距离大约是17mm。焦距约为14-17mm,在眼睛放松且聚焦距离大于3m时,焦距约为17mm晶状体的聚焦中心与视网膜间的距离由17mm缩小到14mm。
2.1)亮度适应和鉴
。
两个现象可以证明感觉亮度不是简单的强度函数。
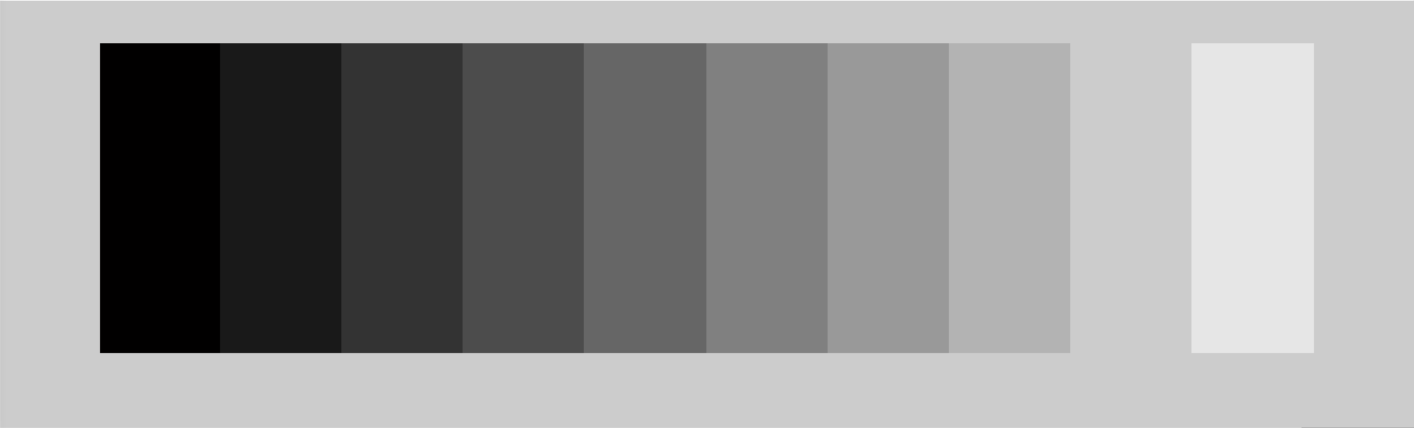
第一个现象基于视觉系统倾向于不同强度区域边界周围的“欠调”或“过调”。其典型例子如右图所示。
虽然条带强度恒定,但实际感觉到了一幅带有毛边的亮度图形(图b),这些表面上的毛边带称为马赫带,由厄恩斯特﹒马赫在1865年首先描述。
1 colormap(gray) 2 dark1=zeros(256,1000); 3 dark1(1:256,100:200)=0.1; 4 imshow(dark1) 5 dark1(1:256,200:300)=0.2; 6 imshow(dark1) 7 dark1(1:256,300:400)=0.3; 8 imshow(dark1) 9 dark1(1:256,400:500)=0.4; 10 imshow(dark1) 11 dark1(1:256,500:600)=0.5; 12 imshow(dark1) 13 dark1(1:256,600:700)=0.6; 14 imshow(dark1) 15 dark1(1:256,700:800)=0.7; 16 imshow(dark1) 17 dark1(1:256,800:900)=0.8; 18 imshow(dark1) 19 dark1(1:256,900:1000)=0.9; 20 imshow(dark1)
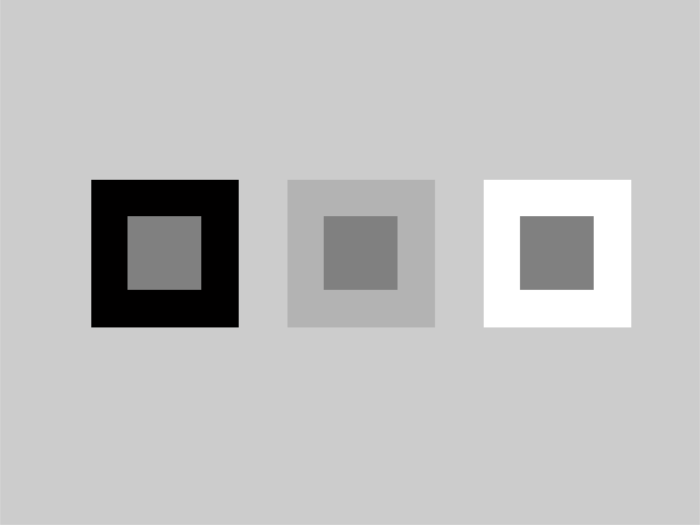
第二个现象称为同时对比现象,即感觉的亮度区域不是简单地取决于强度,如下图所示。
所有的中心方块都有完全相同的强度,但是当背景变亮时,它们在人们的眼中就会逐渐变暗。
一个更熟悉的例子是一张纸,当放在桌子上时看上去似乎比较白,但是,当用纸来遮蔽眼睛直视明亮的天空时,纸看起来总是黑的。
1 colormap(gray);%设置当前图形为灰度图 2 dark=zeros(256,256); 3 dark(64:192,64:192)=0.5; 4 subplot(1,3,1);%将多个图画到一个平面上 5 imshow(dark); 6 %第二块 7 middle(1:256,1:256)=0.7; 8 middle(64:192,64:192)=0.5; 9 subplot(1,3,2); 10 imshow(middle); 11 %第三块 12 bright=ones(256,256); 13 bright(64:192,64:192)=0.5; 14 subplot(1,3,3); 15 imshow(bright);
- part2 数字图像的基础知识
- 图像有单色与彩色、平面与立体、静止与动态、自发光与反射(透射)等区别。
任一幅图像,根据它的光强度(亮度、密度或灰度)的空间分布,均可以用下面的函数形式来表达. 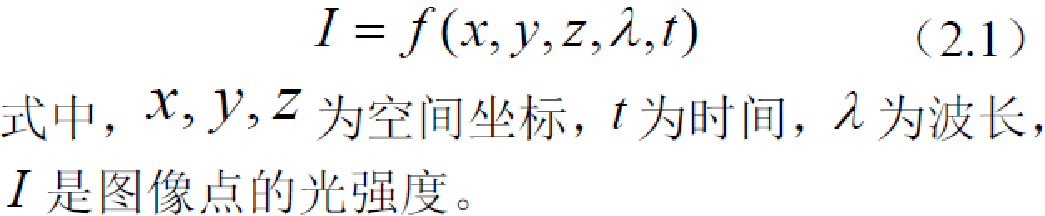
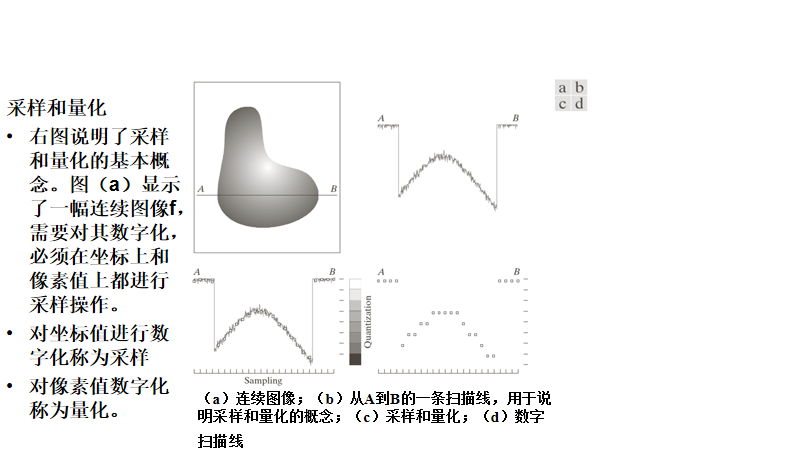
图像获取即图像的数字化过程,包括扫描、采样和量化。
图像获取设备由5个部分组成:采样孔,扫描机构,光传感器,量化器和输出存储体。
关键技术有:采样——成像技术;量化——模数转换技术。
- 图像有单色与彩色、平面与立体、静止与动态、自发光与反射(透射)等区别。
-
-
采样量化的知识可以看https://www.cnblogs.com/henuliulei/p/10496306.html
-
图像的分类
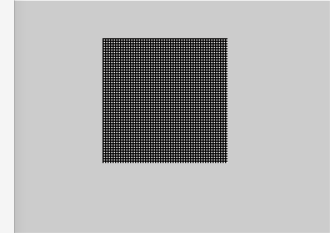
二值图像
只有黑白两种颜色。黑为0,白为1。二值图像适合于由黑白两色构成而没有灰度阴影的图像。
1 clear 2 x=zeros(100,100); 3 x(2:2:100,2:2:100)=1; 4 imshow(x);
灰度图像(GrayScale)
像素灰度级用8bit表示,所以每个像素都是介于黑色和白色之间的256(28=256)种灰度中的一种。灰度图像只有灰度颜色而没有彩色。我们通常所说的黑白照片,其实包含了黑白之间的所有灰度色调。
1 clear 2 x=imread('D:/a.jpg') 3 figure; 4 y=x(28:538,28:581); 5 imshow(y); 6 figure(1); 7 shape(x)

(ps:原谅我,女神,把你弄丑了)
索引颜色图像(Index Color)
在这种模式下,颜色都是预先定义的,并且可供选用的一组颜色也很有限,索引颜色的图像最多只能显示256种颜色。
索引颜色通常也称为映射颜色,一幅索引颜色图像在图像文件里定义,当打开该文件时,构成该图像具体颜色的索引值就被读入程序里,然后根据索引值找到最终的颜色。
真彩色图像(True Color)
:每一个像素由红、绿和蓝三个字节组成,每个字节为8 bit,表示0到255之间的不同的亮度值,这三个字节组合可以产生1670万种不同的颜色。
从技术角度考虑,真彩色是指写到磁盘上的图像类型,而RGB颜色是指显示器的显示模式。 真彩色是RGB颜色的另一种流行的叫法。
RGB图像的颜色是非映射的,这种图像文件里的颜色直接与PC机上的显示颜色相对应。
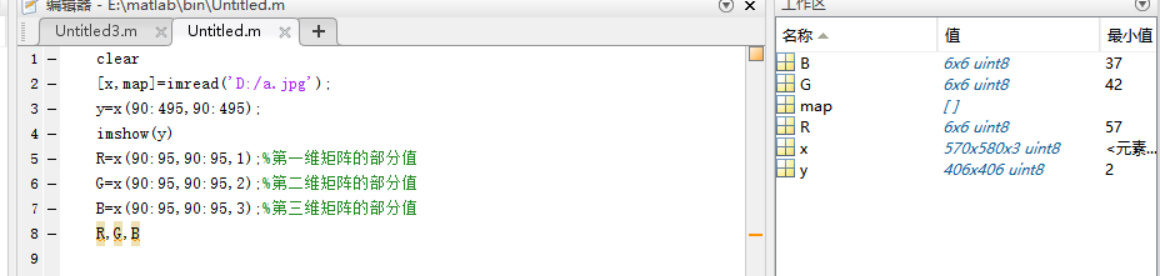
注意矩阵x是三维的,分别是红绿蓝三原色。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
MATLAB一些基础知识巩固
B=zeros(n):生成n×n全零阵。
B=zeros(m,n):生成m×n全零阵。
B=zeros([m n]):生成m×n全零阵。
B=zeros(d1,d2,d3……):生成d1×d2×d3×……全零阵或数组。
B=zeros([d1 d2 d3……]):生成d1×d2×d3×……全零阵或数组。
B=zeros(size(A)):生成与矩阵A相同大小的全零阵。
ones的使用方法与zeros的使用方法类似。
只是0变为1
close:关闭当前的Figure窗口
close all:关闭所有的Figure窗口
clear:清除工作空间的所有变量
clear all:清除工作空间的所有变量,函数,和MEX文件
colormap 是用于控制曲面图的颜色。
1,autumn spring summer winter jet(默认) bone colorcube cool flag 等等
2,一般是函数image()画出的连续的灰度图使用。比如x为一个100*100阶数字矩阵,则image(x)可画出色彩连续的灰度图