项目实现:GitHub
参考博客:CNN模型之ShuffleNet
v1论文:ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices
v2论文:ShuffleNet V2: Practical Guidelines for Ecient CNN Architecture Design
一、分组卷积
Group convolution是将输入层的不同特征图进行分组,然后采用不同的卷积核再对各个组进行卷积,这样会降低卷积的计算量。因为一般的卷积都是在所有的输入特征图上做卷积,可以说是全通道卷积,这是一种通道密集连接方式(channel dense connection),而group convolution相比则是一种通道稀疏连接方式(channel sparse connection)。
tensorflow和分组卷积的讨论:Feature Request: Support for depthwise convolution by groups
1、分组卷积的矛盾——计算量
使用group convolution的网络有很多,如Xception,MobileNet,ResNeXt等。其中Xception和MobileNet采用了depthwise convolution,这是一种比较特殊的group convolution,此时分组数恰好等于通道数,意味着每个组只有一个特征图。是这些网络存在一个很大的弊端是采用了密集的1x1 pointwise convolution(如下图)。

这个问题可以解决:对1x1卷积采用channel sparse connection 即分组操作,那样计算量就可以降下来了,但这就涉及到另外一个问题。
2、分组卷积的矛盾——特征通信
group convolution层另一个问题是不同组之间的特征图需要通信,否则就好像分了几个互不相干的路,大家各走各的,会降低网络的特征提取能力,这也可以解释为什么Xception,MobileNet等网络采用密集的1x1 pointwise convolution,因为要保证group convolution之后不同组的特征图之间的信息交流。
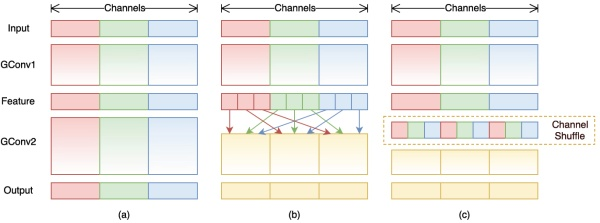
3、channel shuffle
为达到特征通信目的,我们不采用dense pointwise convolution,考虑其他的思路:channel shuffle。如图b,其含义就是对group convolution之后的特征图进行“重组”,这样可以保证接下了采用的group convolution其输入来自不同的组,因此信息可以在不同组之间流转。图c进一步的展示了这一过程并随机,其实是“均匀地打乱”。
在程序上实现channel shuffle是非常容易的:假定将输入层分为 组,总通道数为
,首先你将通道那个维度拆分为
两个维度,然后将这两个维度转置变成
,最后重新reshape成一个维度
。
二、ShuffleNet
ShuffleNet的核心是采用了两种操作:pointwise group convolution和channel shuffle,这在保持精度的同时大大降低了模型的计算量。其基本单元则是在一个残差单元的基础上改进而成。
1、ShuffleNet基本单元
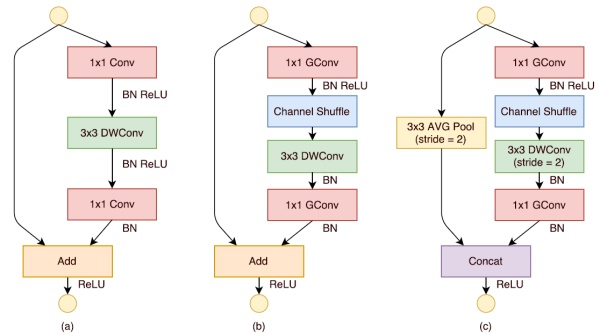
下图a展示了基本ResNet轻量级结构,这是一个包含3层的残差单元:首先是1x1卷积,然后是3x3的depthwise convolution(DWConv,主要是为了降低计算量),这里的3x3卷积是瓶颈层(bottleneck),紧接着是1x1卷积,最后是一个短路连接,将输入直接加到输出上。
下图b展示了改进思路:将密集的1x1卷积替换成1x1的group convolution,不过在第一个1x1卷积之后增加了一个channel shuffle操作。值得注意的是3x3卷积后面没有增加channel shuffle,按paper的意思,对于这样一个残差单元,一个channel shuffle操作是足够了。还有就是3x3的depthwise convolution之后没有使用ReLU激活函数。
下图c展示了其他改进,对原输入采用stride=2的3x3 avg pool,在depthwise convolution卷积处取stride=2保证两个通路shape相同,然后将得到特征图与输出进行连接(concat,借鉴了DenseNet?),而不是相加。极致的降低计算量与参数大小。
2、ShuffleNet网络结构

可以看到开始使用的普通的3x3的卷积和max pool层。然后是三个阶段,每个阶段都是重复堆积了几个ShuffleNet的基本单元。对于每个阶段,第一个基本单元采用的是stride=2,这样特征图width和height各降低一半,而通道数增加一倍。后面的基本单元都是stride=1,特征图和通道数都保持不变。对于基本单元来说,其中瓶颈层,就是3x3卷积层的通道数为输出通道数的1/4,这和残差单元的设计理念是一样的。
3、对比实验
下表给出了不同g值(分组数)的ShuffleNet在ImageNet上的实验结果。可以看到基本上当g越大时,效果越好,这是因为采用更多的分组后,在相同的计算约束下可以使用更多的通道数,或者说特征图数量增加,网络的特征提取能力增强,网络性能得到提升。注意Shuffle 1x是基准模型,而0.5x和0.25x表示的是在基准模型上将通道数缩小为原来的0.5和0.25。
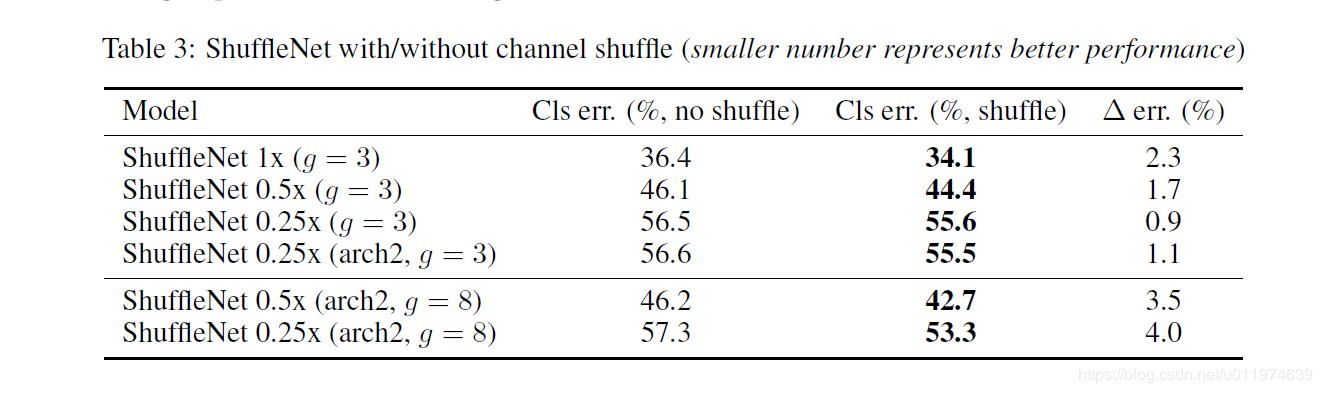
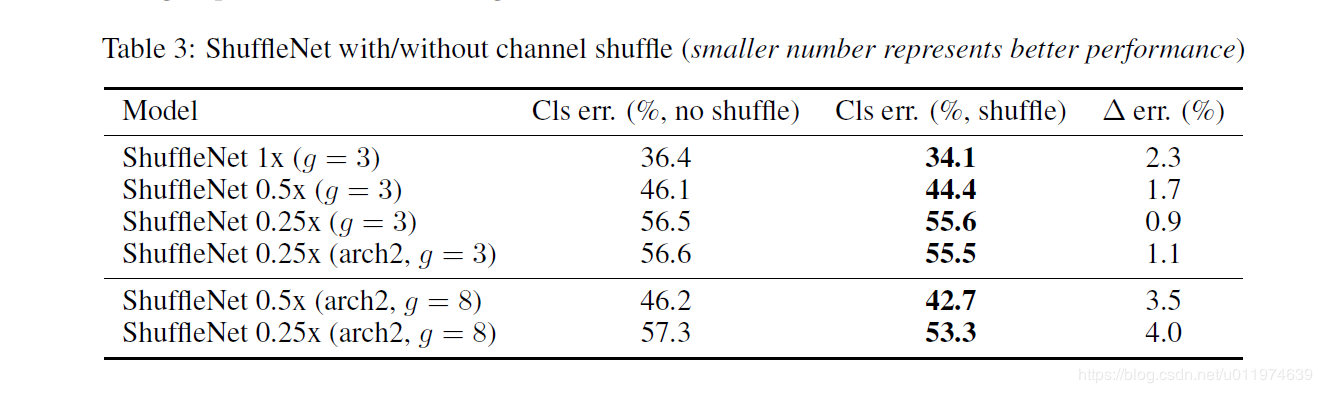
除此之外,作者还对比了不采用channle shuffle和采用之后的网络性能对比,如下表的看到,采用channle shuffle之后,网络性能更好,从而证明channle shuffle的有效性。
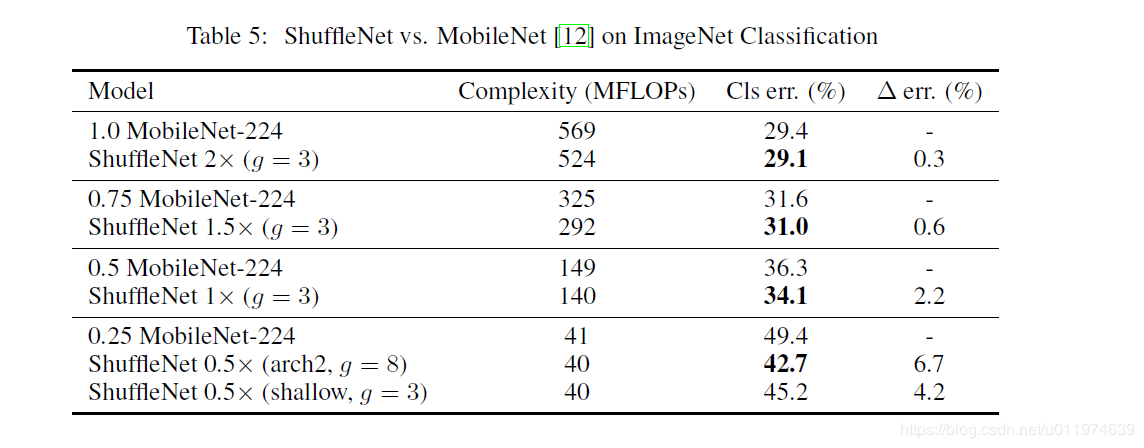
然后是ShuffleNet与MobileNet的对比,如下表ShuffleNet不仅计算复杂度更低,而且精度更好。
三、ShuffleNet_v2
我们首先来看v1版本和v2版本的基础单元,(a)和(b)是ShuffleNet v1的两种不同block结构,两者的差别在于后者对特征图尺寸做了缩小,这和ResNet中某个stage的两种block功能类似,同理(c)和(d)是ShuffleNet v2的两种不同block结构:

看点如下:
从(a)和(c)的对比可以看出首先(c)在开始处增加了一个channel split操作,这个操作将输入特征的通道分成c-c’和c’,c’在文章中采用c/2,这主要是和第1点发现对应
然后(c)中取消了1*1卷积层中的group操作,这和第2点发现对应,同时前面的channel split其实已经算是变相的group操作了
channel shuffle的操作移到了concat后面,和第3点发现对应,同时也是因为第一个1*1卷积层没有group操作,所以在其后面跟channel shuffle也没有太大必要
最后是将element-wise add操作替换成concat,这个和第4点发现对应。
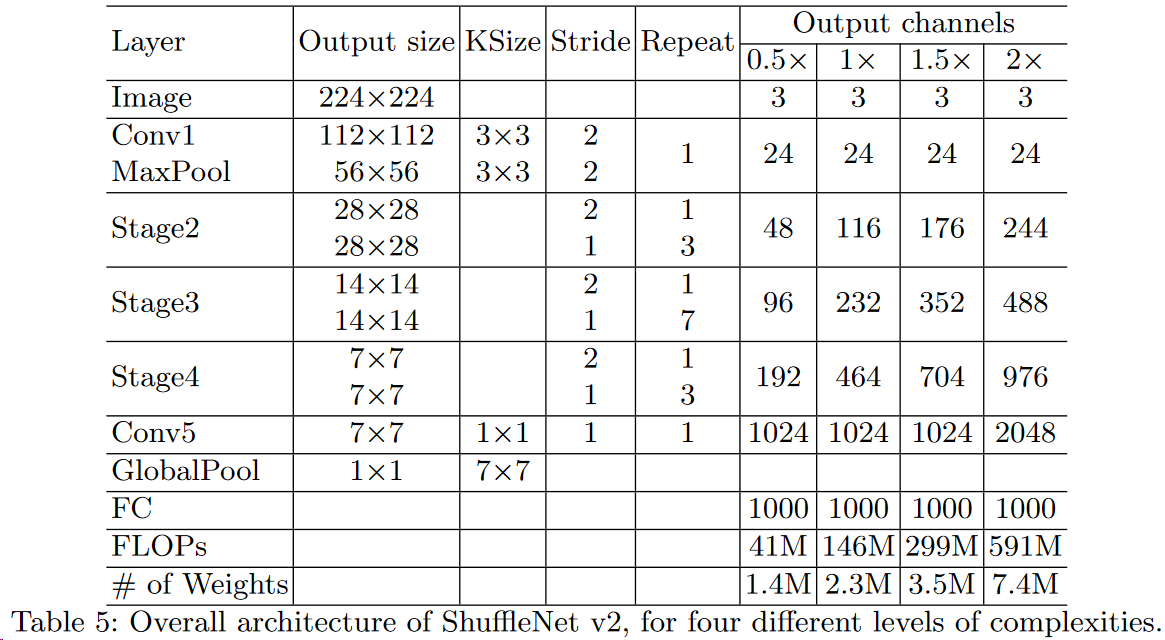
多个(c)结构连接在一起的话,channel split、concat和channel shuffle是可以合并在一起的。(b)和(d)的对比也是同理,只不过因为(d)的开始处没有channel split操作,所以最后concat后特征图通道数翻倍,可以结合后面具体网络结构来看:
现在我们查看一个新的概念:内存访问消耗时间(memory access cost),它正比于模型对内存的消耗(特征大小+卷积核大小),在这篇文章中作者使用该指标来衡量模型的速度而非传统的FLOPs(float-point operations),它更多的侧重卷积层的乘法操作,作者认为FLOPs并不能实质的反应模型速度。
现在我们来看一下这四点发现,分别对应了结构中的四点创新:
卷积层的输入和输出特征通道数相等时MAC最小,此时模型速度最快
过多的group操作会增大MAC,从而使模型速度变慢
模型中的分支数量越少,模型速度越快
element-wise操作所带来的时间消耗远比在FLOPs上的体现的数值要多,因此要尽可能减少element-wise操作
至于模型的具体提升,建议之间看原文的图表。