原文:http://blog.csdn.net/a8039974/article/details/77592395,
http://blog.csdn.net/jesse_mx/article/details/74011886
另外一篇很详细的解析:https://www.cnblogs.com/xuanyuyt/p/7222867.html
SSD github : https://github.com/weiliu89/caffe/tree/ssd
SSD paper : https://arxiv.org/abs/1512.02325
SSD eccv2016 slide pdf : http://download.csdn.NET/download/zy1034092330/9940054
SSD pose estimation paper : http://download.csdn.net/download/zy1034092330/9940059

图1
缩进SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法,截至目前是主要的检测框架之一,相比Faster RCNN有明显的速度优势,相比YOLO又有明显的mAP优势(不过已经被CVPR 2017的YOLO9000超越)。SSD具有如下主要特点:
- 从YOLO中继承了将detection转化为regression的思路,同时一次即可完成网络训练
- 基于Faster RCNN中的anchor,提出了相似的prior box;
- 加入基于特征金字塔(Pyramidal Feature Hierarchy)的检测方式,相当于半个FPN思路
本文接下来都以SSD 300为例进行分析。
1 SSD网络结构

图2 SSD网络结构(和代码貌似有点差别)
缩进上图2是原论文中的SSD 300网络结构图。可以看到YOLO在卷积层后接全连接层,即检测时只利用了最高层feature maps(包括Faster RCNN也是如此);而SSD采用了特征金字塔结构进行检测,即检测时利用了conv4-3,conv-7(FC7),conv6-2,conv7-2,conv8_2,conv9_2这些大小不同的feature maps,在多个feature maps上同时进行softmax分类和位置回归,如图3。

图3 单层feature map预测和特征金字塔预测对比
下面以VGGNet-SSD为例,结合prototxt源文件说一下网络结构。
数据层
这里的数据层类型是AnnotatedData,主要注意下lmdb的source,batch_size以及label_map_file即可。
# 数据层 name: "VGG_VOC0712_SSD_300x300_train" layer { name: "data" type: "AnnotatedData" top: "data" top: "label" include { phase: TRAIN } transform_param { mirror: true mean_value: 104 mean_value: 117 mean_value: 123 resize_param { prob: 1 resize_mode: WARP height: 300 300 interp_mode: LINEAR interp_mode: AREA interp_mode: NEAREST interp_mode: CUBIC interp_mode: LANCZOS4 } emit_constraint { emit_type: CENTER } distort_param { brightness_prob: 0.5 brightness_delta: 32 contrast_prob: 0.5 contrast_lower: 0.5 contrast_upper: 1.5 hue_prob: 0.5 hue_delta: 18 saturation_prob: 0.5 saturation_lower: 0.5 saturation_upper: 1.5 random_order_prob: 0.0 } expand_param { prob: 0.5 max_expand_ratio: 4.0 } } data_param { source: "examples/VOC0712/VOC0712_trainval_lmdb" batch_size: 32 backend: LMDB } annotated_data_param { batch_sampler { max_sample: 1 max_trials: 1 } batch_sampler { sampler { min_scale: 0.3 max_scale: 1.0 min_aspect_ratio: 0.5 max_aspect_ratio: 2.0 } sample_constraint { min_jaccard_overlap: 0.1 } max_sample: 1 max_trials: 50 } batch_sampler { sampler { min_scale: 0.3 max_scale: 1.0 min_aspect_ratio: 0.5 max_aspect_ratio: 2.0 } sample_constraint { min_jaccard_overlap: 0.3 } max_sample: 1 max_trials: 50 } batch_sampler { sampler { min_scale: 0.3 max_scale: 1.0 min_aspect_ratio: 0.5 max_aspect_ratio: 2.0 } sample_constraint { min_jaccard_overlap: 0.5 } max_sample: 1 max_trials: 50 } batch_sampler { sampler { min_scale: 0.3 max_scale: 1.0 min_aspect_ratio: 0.5 max_aspect_ratio: 2.0 } sample_constraint { min_jaccard_overlap: 0.7 } max_sample: 1 max_trials: 50 } batch_sampler { sampler { min_scale: 0.3 max_scale: 1.0 min_aspect_ratio: 0.5 max_aspect_ratio: 2.0 } sample_constraint { min_jaccard_overlap: 0.9 } max_sample: 1 max_trials: 50 } batch_sampler { sampler { min_scale: 0.3 max_scale: 1.0 min_aspect_ratio: 0.5 max_aspect_ratio: 2.0 } sample_constraint { max_jaccard_overlap: 1.0 } max_sample: 1 max_trials: 50 } label_map_file: "data/VOC0712/labelmap_voc.prototxt" } }
特征提取网络
特征提取网络由两部分构成,VGGNet和新增的8个卷积层,要点有三处。
第一,这个VGGNet不同于原版,是修改过的,全名叫VGG_ILSVRC_16_layers_fc_reduced是作者另一篇论文ParseNet: Looking Wider to See Better的成果,然后被用到了SSD中。
第二,为什么要新增这么8个卷积层?因为在300x300输入下,conv4_3的分辨率为38x38,而到fc7层,也还有19x19,那就必须新增一些卷积层,以产生更多低分辨率的层,方便进行多层特征融合。最终作者选择了6个卷积层作为bottom,分辨率如下图所示,然后依次接上若干检测层。
| 卷积层 | 分辨率 |
|---|---|
| conv4_3_norm | 38x38 |
| f7 | 19x19 |
| conv6_2 | 10x10 |
| conv7_2 | 5x5 |
| conv8_2 | 3x3 |
| conv9_2 | 1x1 |
第三,只有conv4_3加入了norm,这是为什么呢?原因仍然在论文中ParseNet中,大概是说,因为conv4_3的scale(尺度?)和其它层相比不同,才要加入norm使其均衡一些。
# 特征提取网络 layer { name: "conv1_1" type: "Convolution" bottom: "data" top: "conv1_1" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 64 pad: 1 kernel_size: 3 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } # # 省略很多层 # layer { name: "fc7" type: "Convolution" bottom: "fc6" top: "fc7" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 1024 kernel_size: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } layer { name: "relu7" type: "ReLU" bottom: "fc7" top: "fc7" } # 到此是VGG网络层,从conv1到fc7 layer { name: "conv6_1" type: "Convolution" bottom: "fc7" top: "conv6_1" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 256 pad: 0 kernel_size: 1 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } # # 省略很多层 # layer { name: "conv9_2_relu" type: "ReLU" bottom: "conv9_2" top: "conv9_2" # 到此是新增的8层卷积层,从conv6_1到conv9_2
多层融合检测网络
这一部分,作者选择了6个层作为bottom,在其上连接了一系列的检测相关层,这里以f7层为例,看看它作为bottom,连接了那些层。首先是loc相关层,包括fc7_mbox_loc,fc7_mbox_loc_perm和fc7_mbox_loc_flat。
# mbox_loc层,预测box的坐标,其中24=6(default box数量)x4(四个坐标) layer { name: "fc7_mbox_loc" type: "Convolution" bottom: "fc7" top: "fc7_mbox_loc" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 24 pad: 1 kernel_size: 3 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } # mbox_loc_perm层,将上一层产生的mbox_loc重新排序 layer { name: "fc7_mbox_loc_perm" type: "Permute" bottom: "fc7_mbox_loc" top: "fc7_mbox_loc_perm" permute_param { order: 0 order: 2 order: 3 order: 1 } } # mbox_loc_flat层,将perm层展平(例如将7x7展成1x49),方便拼接 layer { name: "fc7_mbox_loc_flat" type: "Flatten" bottom: "fc7_mbox_loc_perm" top: "fc7_mbox_loc_flat" flatten_param { axis: 1 } }
然后是conf相关层,包括fc7_mbox_conf,fc7_mbox_conf_perm和fc7_mbox_conf_flat。
# mbox_conf层,预测box的类别置信度,126=6(default box数量)x21(总类别数) layer { name: "fc7_mbox_conf" type: "Convolution" bottom: "fc7" top: "fc7_mbox_conf" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 126 pad: 1 kernel_size: 3 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } # box_conf_perm层,将上一层产生的mbox_conf重新排序 layer { name: "fc7_mbox_conf_perm" type: "Permute" bottom: "fc7_mbox_conf" top: "fc7_mbox_conf_perm" permute_param { order: 0 order: 2 order: 3 order: 1 } } # mbox_conf_flat层,将perm层展平,方便拼接 layer { name: "fc7_mbox_conf_flat" type: "Flatten" bottom: "fc7_mbox_conf_perm" top: "fc7_mbox_conf_flat" flatten_param { axis: 1 } }
最后是priorbox层,就只有fc7_mbox_priorbox
# mbox_priorbox层,根据标注信息,经过转换,在cell中产生box真实值 layer { name: "fc7_mbox_priorbox" type: "PriorBox" bottom: "fc7" bottom: "data" top: "fc7_mbox_priorbox" prior_box_param { min_size: 60.0 max_size: 111.0 # priorbox的上下界为60~111
# first prior: aspect_ratio = 1, box_width = box_height = min_size_;
# second prior: aspect_ratio = 1, box_width = box_height = sqrt(min_size * max_size);
# others: box_width = min_size_ * sqrt(aspect_ratio); box_height = min_size_ / sqrt(aspect_ratio); 然后对称交换宽高
# 具体详见prior_box_layer.cpp文件
aspect_ratio: 2 aspect_ratio: 3 # 共同定义default box数量为6 flip: true clip: false variance: 0.1 variance: 0.1 variance: 0.2 variance: 0.2 step: 16 # 不同层的值不同 offset: 0.5 } }
各个值的计算,详见ssd_pascal.py
mbox_source_layers = ['conv4_3', 'fc7', 'conv6_2', 'conv7_2', 'conv8_2', 'conv9_2'] # in percent % min_ratio = 20 max_ratio = 90 step = int(math.floor((max_ratio - min_ratio) / (len(mbox_source_layers) - 2))) min_sizes = [] max_sizes = [] for ratio in xrange(min_ratio, max_ratio + 1, step): min_sizes.append(min_dim * ratio / 100.) max_sizes.append(min_dim * (ratio + step) / 100.) min_sizes = [min_dim * 10 / 100.] + min_sizes max_sizes = [min_dim * 20 / 100.] + max_sizes steps = [8, 16, 32, 64, 100, 300] aspect_ratios = [[2], [2, 3], [2, 3], [2, 3], [2], [2]]
下面做一个表格统计一下多层融合检测层的相关重要参数:
| bottom层 | conv4_3 | fc7 | conv6_2 | conv7_2 | conv8_2 | conv9_2 |
|---|---|---|---|---|---|---|
| 分辨率 | 38x38 | 19x19 | 10x10 | 5x5 | 3x3 | 1x1 |
| default box数量 | 4 | 6 | 6 | 6 | 4 | 4 |
| aspect_ratio | 2 | 2,3 | 2,3 | 2,3 | 2 | 2 |
| steps | 8 | 16 | 32 | 64 | 100 | 300 |
| loc层num_output | 16 | 24 | 24 | 24 | 16 | 16 |
| conf层num_output | 84 | 126 | 126 | 126 | 84 | 84 |
| priorbox层min max size | 30~60 | 60~111 | 111~162 | 162~213 | 213~264 | 264~315 |
| offset | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| variance | 0.1,0.1,0.2,0.2 | 0.1,0.1,0.2,0.2 | 0.1,0.1,0.2,0.2 | 0.1,0.1,0.2,0.2 | 0.1,0.1,0.2,0.2 | 0.1,0.1,0.2,0.2 |
具体到每一个feature map上获得prior box时,会从这6种中进行选择。如下表和图所示最后会得到(38*38*4 + 19*19*6 + 10*10*6 + 5*5*6 + 3*3*4 + 1*1*4)= 8732个prior box
这里需要添加3个concat层,分别拼接所有的loc层,conf层以及priorbox层。
# mbox_loc层,拼接6个loc_flat层 layer { name: "mbox_loc" type: "Concat" bottom: "conv4_3_norm_mbox_loc_flat" bottom: "fc7_mbox_loc_flat" bottom: "conv6_2_mbox_loc_flat" bottom: "conv7_2_mbox_loc_flat" bottom: "conv8_2_mbox_loc_flat" bottom: "conv9_2_mbox_loc_flat" top: "mbox_loc" concat_param { axis: 1 } } # mbox_conf层,拼接6个conf_flat层 layer { name: "mbox_conf" type: "Concat" bottom: "conv4_3_norm_mbox_conf_flat" bottom: "fc7_mbox_conf_flat" bottom: "conv6_2_mbox_conf_flat" bottom: "conv7_2_mbox_conf_flat" bottom: "conv8_2_mbox_conf_flat" bottom: "conv9_2_mbox_conf_flat" top: "mbox_conf" concat_param { axis: 1 } } # mbox_priorbox层,拼接6个mbox_priorbox层 layer { name: "mbox_priorbox" type: "Concat" bottom: "conv4_3_norm_mbox_priorbox" bottom: "fc7_mbox_priorbox" bottom: "conv6_2_mbox_priorbox" bottom: "conv7_2_mbox_priorbox" bottom: "conv8_2_mbox_priorbox" bottom: "conv9_2_mbox_priorbox" top: "mbox_priorbox" concat_param { axis: 2 } }
损失层
损失层类型是MultiBoxLoss,这也是作者自己写的,在smooth_L1损失层基础上修改。损失层的bottom是三个concat层以及data层中的label,参数一般不需要改,注意其中的num_classes即可。
# 损失层 layer { name: "mbox_loss" type: "MultiBoxLoss" bottom: "mbox_loc" bottom: "mbox_conf" bottom: "mbox_priorbox" bottom: "label" top: "mbox_loss" include { phase: TRAIN } propagate_down: true propagate_down: true propagate_down: false propagate_down: false loss_param { normalization: VALID } multibox_loss_param { loc_loss_type: SMOOTH_L1 conf_loss_type: SOFTMAX loc_weight: 1.0 num_classes: 21 share_location: true match_type: PER_PREDICTION overlap_threshold: 0.5 use_prior_for_matching: true background_label_id: 0 use_difficult_gt: true neg_pos_ratio: 3.0 neg_overlap: 0.5 code_type: CENTER_SIZE ignore_cross_boundary_bbox: false mining_type: MAX_NEGATIVE } }
正负样本选择
使用将prior box 和 grount truth box 按照IOU(JaccardOverlap)进行匹配,匹配成功则这个prior box就是positive example(正样本),如果匹配不上,就是negative example(负样本),显然这样产生的负样本的数量要远远多于正样本。这里将前向loss进行排序,选择最高的num_sel个prior box序号集合 DD。那么如果Match成功后的正样本序号集合PP。那么最后正样本集为 P−D∩PP−D∩P,负样本集为 D−D∩PD−D∩P,这里利用num_sel控制最后正、负样本的比例在 1:3 左右。
如果选择HARD_EXAMPLE方式(源于论文Training Region-based Object Detectors with Online Hard Example Mining),则默认M=64,由于无法控制正样本数量,这种方式就有点类似于分类、回归按比重不同交替训练了。 如果选择MAX_NEGATIVE方式,则M=P∗neg_pos_ratio,这里当neg_pos_ratio=3的时候,就是论文中的正负样本比例1:3了。
2 Prior Box
缩进在SSD中引入了Prior Box,实际上与anchor非常类似,就是一些目标的预选框,后续通过softmax分类+bounding box regression获得真实目标的位置。SSD按照如下规则生成prior box:
- 以feature map上每个点的中点为中心(offset=0.5),生成一些列同心的prior box(然后中心点的坐标会乘以step,相当于从feature map位置映射回原图位置)
- 正方形prior box最小边长为
,最大边长为:
- 每在prototxt设置一个aspect ratio,会生成2个长方形,长宽为:
和



图4 prior box
- 而每个feature map对应prior box的min_size和max_size由以下公式决定,公式中m是使用feature map的数量(SSD 300中m=6):

第一层feature map对应的min_size=S1,max_size=S2;第二层min_size=S2,max_size=S3;其他类推。在原文中,Smin=0.2,Smax=0.9,但是在SSD 300中prior box设置并不能和paper中上述公式对应:
| min_size | max_size | |
|---|---|---|
| conv4_3 |
30
|
60
|
| fc7 |
60
|
111
|
| conv6_2 |
111
|
162
|
| conv7_2 |
162
|
213
|
| conv8_2 |
213
|
264
|
| conv9_2 |
264
|
315
|
不过依然可以看出,SSD使用低层feature map检测小目标,使用高层feature map检测大目标,这也应该是SSD的突出贡献了。其中SSD 300在conv4_3生成prior box的conv4_3_norm_priorbox层prototxt定义如下:
- layer {
- name: "conv4_3_norm_mbox_priorbox"
- type: "PriorBox"
- bottom: "conv4_3_norm"
- bottom: "data"
- top: "conv4_3_norm_mbox_priorbox"
- prior_box_param {
- min_size: 30.0
- max_size: 60.0
- aspect_ratio: 2
- flip: true
- clip: false
- variance: 0.1
- variance: 0.1
- variance: 0.2
- variance: 0.2
- step: 8
- offset: 0.5
- }
- }
知道了priorbox如何产生,接下来分析prior box如何使用。这里以conv4_3为例进行分析。

图5
从图5可以看到,在conv4_3 feature map网络pipeline分为了3条线路:
- 经过一次batch norm+一次卷积后,生成了[1, num_class*num_priorbox, layer_height, layer_width]大小的feature用于softmax分类目标和非目标(其中num_class是目标类别,SSD 300中num_class = 21)
- 经过一次batch norm+一次卷积后,生成了[1, 4*num_priorbox, layer_height, layer_width]大小的feature用于bounding box regression(即每个点一组[dxmin,dymin,dxmax,dymax],参考Faster RCNN 2.5节)
- 生成了[1, 2, 4*num_priorbox]大小的prior box blob,其中2个channel分别存储prior box的4个点坐标和对应的4个variance
缩进后续通过softmax分类+bounding box regression即可从priox box中预测到目标,熟悉Faster RCNN的读者应该对上述过程应该并不陌生。其实pribox box的与Faster RCNN中的anchor非常类似,都是目标的预设框,没有本质的差异。区别是每个位置的prior box一般是4~6个,少于Faster RCNN默认的9个anchor;同时prior box是设置在不同尺度的feature maps上的,而且大小不同。
缩进还有一个细节就是上面prototxt中的4个variance,这实际上是一种bounding regression中的权重。在图4线路(2)中,网络输出[dxmin,dymin,dxmax,dymax],即对应下面代码中bbox;然后利用如下方法进行针对prior box的位置回归:
- decode_bbox->set_xmin(
- prior_bbox.xmin() + prior_variance[0] * bbox.xmin() * prior_width);
- decode_bbox->set_ymin(
- prior_bbox.ymin() + prior_variance[1] * bbox.ymin() * prior_height);
- decode_bbox->set_xmax(
- prior_bbox.xmax() + prior_variance[2] * bbox.xmax() * prior_width);
- decode_bbox->set_ymax(
- prior_bbox.ymax() + prior_variance[3] * bbox.ymax() * prior_height);
上述代码可以在SSD box_utils.cpp的void DecodeBBox()函数见到。
3 Permute,Flatten And Concat Layers

图6
缩进上一节以conv4_3 feature map分析了如何检测到目标的真实位置,但是SSD 300是使用包括conv4_3在内的共计6个feature maps一同检测出最终目标的。在网络运行的时候显然不能像图6一样:一个feature map单独计算一次softmax socre+box regression(虽然原理如此,但是不能如此实现)。那么多个feature maps如何协同工作?这时候就要用到Permute,Flatten和Concat这3种层了。其中conv4_3_norm_conf_perm的prototxt定义如下:
- layer {
- name: "conv4_3_norm_mbox_conf_perm"
- type: "Permute"
- bottom: "conv4_3_norm_mbox_conf"
- top: "conv4_3_norm_mbox_conf_perm"
- permute_param {
- order: 0
- order: 2
- order: 3
- order: 1
- }
- }
Permute是SSD中自带的层,上面conv4_3_norm_mbox_conf_perm的的定义。Permute相当于交换caffe blob中的数据维度。在正常情况下caffe blob的顺序为:
bottom blob = [batch_num, channel, height, width]
经过conv4_3_norm_mbox_conf_perm后的caffe blob为:
top blob = [batch_num, height, width, channel]
而Flattlen和Concat层都是caffe自带层,请参照caffe official documentation理解。

图7 SSD中部分层caffe blob shape变化
缩进那么接下来以conv4_3和fc7为例分析SSD是如何将不同size的feature map组合在一起进行prediction。图7展示了conv4_3和fc7合并在一起的过程中caffe blob shape变化(其他层类似,考虑到图片大小没有画出来,请脑补)。
- 对于conv4_3 feature map,conv4_3_norm_priorbox(priorbox层)设置了每个点共有4个prior box。由于SSD 300共有21个分类,所以conv4_3_norm_mbox_conf的channel值为num_priorbox * num_class = 4 * 21 = 84;而每个prior box都要回归出4个位置变换量,所以conv4_3_norm_mbox_loc的caffe blob channel值为4 * 4 = 16。
- fc7每个点有6个prior box,其他feature map同理。
- 经过一系列图7展示的caffe blob shape变化后,最后拼接成mbox_conf和mbox_loc。而mbox_conf后接reshape,再进行softmax(为何在softmax前进行reshape,Faster RCNN有提及)。
- 最后这些值输出detection_out_layer,获得检测结果
4 SSD网络结构优劣分析
缩进SSD算法的优点应该很明显:运行速度可以和YOLO媲美,检测精度可以和Faster RCNN媲美。除此之外,还有一些鸡毛蒜皮的优点,不解释了。这里谈谈缺点:
- 需要人工设置prior box的min_size,max_size和aspect_ratio值。网络中prior box的基础大小和形状不能直接通过学习获得,而是需要手工设置。而网络中每一层feature使用的prior box大小和形状恰好都不一样,导致调试过程非常依赖经验。
- 虽然采用了pyramdial feature hierarchy的思路,但是对小目标的recall依然一般,并没有达到碾压Faster RCNN的级别。作者认为,这是由于SSD使用conv4_3低级feature去检测小目标,而低级特征卷积层数少,存在特征提取不充分的问题。
5 SSD训练过程

缩进对于SSD,虽然paper中指出采用了所谓的“multibox loss”,但是依然可以清晰看到SSD loss分为了confidence loss和location loss两部分,其中N是match到GT(Ground Truth)的prior box数量;而α参数用于调整confidence loss和location loss之间的比例,默认α=1。SSD中的confidence loss是典型的softmax loss:

其中

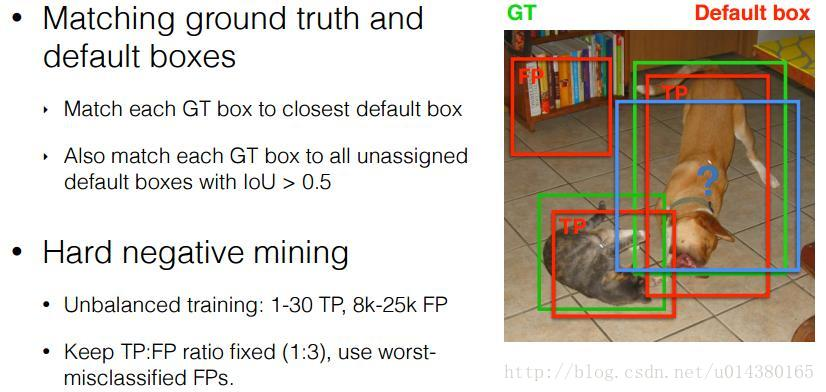
Matching strategy:
缩进在训练时,groundtruth boxes 与 default boxes(就是prior boxes) 按照如下方式进行配对:
- 首先,寻找与每一个ground truth box有最大的jaccard overlap的default box,这样就能保证每一个groundtruth box与唯一的一个default box对应起来(所谓的jaccard overlap就是IoU,如图8)。
- SSD之后又将剩余还没有配对的default box与任意一个groundtruth box尝试配对,只要两者之间的jaccard overlap大于阈值,就认为match(SSD 300 阈值为0.5)。
- 显然配对到GT的default box就是positive,没有配对到GT的default box就是negative。



图8 jaccard overlap
- 所以SSD在训练时会依据confidience score排序default box,挑选其中confidience高的box进行训练,控制positive:negative=1:3
Data augmentation:
缩进数据增广,即每一张训练图像,随机的进行如下几种选择:
- 使用原始的图像
- 采样一个 patch,与物体之间最小的 jaccard overlap 为:0.1,0.3,0.5,0.7 或 0.9
- 随机的采样一个 patch
其实Matching strategy,Hard negative mining,Data augmentation,都是为了加快网络收敛而设计的。尤其是Data augmentation,翻来覆去的randomly crop,保证每一个prior box都获得充分训练而已。不过当数据达到一定量的时候,不建议再进行Data augmentation,毕竟“真”的数据比“假”数据还是要好很多。
以ResNet作为前缀网络的SSD
http://blog.csdn.net/zhangjunbob/article/details/53119959
前面的部分直接使用ResNet网络即可,并且可以事先使用对应的数据集对ResNet网络进行预训练,后续直接将其接入SSD框架中,下面讲的是将ResNet50接入SSD中,对应的接入部分列出如下:
//至此resnet主体结构完成,随后接上ssd的结构 //用pool5作为bottom分别产生mbox_loc/mbox_conf/mbox_priorbox layer { name: "pool5_mbox_loc" type: "Convolution" bottom: "pool5" //选取pool5作为bottom,产生mbox_loc top: "pool5_mbox_loc" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 24 pad: 1 kernel_size: 3 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } layer { name: "pool5_mbox_loc_perm" //将上一层产生的mbox_loc重新排序 type: "Permute" bottom: "pool5_mbox_loc" top: "pool5_mbox_loc_perm" permute_param { order: 0 order: 2 order: 3 order: 1 } } layer { name: "pool5_mbox_loc_flat" //将上一层展平(例如7*7的展平成1*49,方便之后的拼接) type: "Flatten" bottom: "pool5_mbox_loc_perm" top: "pool5_mbox_loc_flat" flatten_param { axis: 1 } } layer { name: "pool5_mbox_conf" type: "Convolution" bottom: "pool5" //选取pool5作为bottom,产生mbox_conf(之后的排序展平同理) top: "pool5_mbox_conf" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 126 pad: 1 kernel_size: 3 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } layer { name: "pool5_mbox_conf_perm" type: "Permute" bottom: "pool5_mbox_conf" top: "pool5_mbox_conf_perm" permute_param { order: 0 order: 2 order: 3 order: 1 } } layer { name: "pool5_mbox_conf_flat" type: "Flatten" bottom: "pool5_mbox_conf_perm" top: "pool5_mbox_conf_flat" flatten_param { axis: 1 } } layer { name: "pool5_mbox_priorbox" type: "PriorBox" bottom: "pool5" //选取pool5作为bottom,产生mbox_priorbox(之后排序展平) bottom: "data" top: "pool5_mbox_priorbox" prior_box_param { min_size: 276.0 max_size: 330.0 aspect_ratio: 2 aspect_ratio: 3 flip: true clip: true variance: 0.1 variance: 0.1 variance: 0.2 variance: 0.2 } } //同理用res5c作为bottom分别产生mbox_loc/mbox_conf/mbox_priorbox layer { name: "res5c_mbox_loc" type: "Convolution" bottom: "res5c" top: "res5c_mbox_loc" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 24 pad: 1 kernel_size: 3 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } layer { name: "res5c_mbox_loc_perm" type: "Permute" bottom: "res5c_mbox_loc" top: "res5c_mbox_loc_perm" permute_param { order: 0 order: 2 order: 3 order: 1 } } layer { name: "res5c_mbox_loc_flat" type: "Flatten" bottom: "res5c_mbox_loc_perm" top: "res5c_mbox_loc_flat" flatten_param { axis: 1 } } layer { name: "res5c_mbox_conf" type: "Convolution" bottom: "res5c" top: "res5c_mbox_conf" param { lr_mult: 1 decay_mult: 1 } param { lr_mult: 2 decay_mult: 0 } convolution_param { num_output: 126 pad: 1 kernel_size: 3 stride: 1 weight_filler { type: "xavier" } bias_filler { type: "constant" value: 0 } } } layer { name: "res5c_mbox_conf_perm" type: "Permute" bottom: "res5c_mbox_conf" top: "res5c_mbox_conf_perm" permute_param { order: 0 order: 2 order: 3 order: 1 } } layer { name: "res5c_mbox_conf_flat" type: "Flatten" bottom: "res5c_mbox_conf_perm" top: "res5c_mbox_conf_flat" flatten_param { axis: 1 } } layer { name: "res5c_mbox_priorbox" type: "PriorBox" bottom: "res5c" bottom: "data" top: "res5c_mbox_priorbox" prior_box_param { min_size: 276.0 max_size: 330.0 aspect_ratio: 2 aspect_ratio: 3 flip: true clip: true variance: 0.1 variance: 0.1 variance: 0.2 variance: 0.2 } } //Concat层将刚才的res5c和pool5产生的mbox_loc/mbox_conf/mbox_priorbox拼接起来形成一个层 layer { name: "mbox_loc" type: "Concat" bottom: "res5c_mbox_loc_flat" bottom: "pool5_mbox_loc_flat" top: "mbox_loc" concat_param { axis: 1 } } layer { name: "mbox_conf" type: "Concat" bottom: "res5c_mbox_conf_flat" bottom: "pool5_mbox_conf_flat" top: "mbox_conf" concat_param { axis: 1 } } layer { name: "mbox_priorbox" type: "Concat" bottom: "res5c_mbox_priorbox" bottom: "pool5_mbox_priorbox" top: "mbox_priorbox" concat_param { axis: 2 } } <span style="color:#ff0000;">//mbox_loc,mbox_conf,mbox_priorbox一起做的loss-function</span> layer { name: "mbox_loss" type: "MultiBoxLoss" bottom: "mbox_loc" bottom: "mbox_conf" bottom: "mbox_priorbox" bottom: "label" top: "mbox_loss" include { phase: TRAIN } propagate_down: true propagate_down: true propagate_down: false propagate_down: false loss_param { normalization: VALID } multibox_loss_param { loc_loss_type: SMOOTH_L1 conf_loss_type: SOFTMAX loc_weight: 1.0 num_classes: 21 share_location: true match_type: PER_PREDICTION overlap_threshold: 0.5 use_prior_for_matching: true background_label_id: 0 use_difficult_gt: true do_neg_mining: true neg_pos_ratio: 3.0 neg_overlap: 0.5 code_type: CENTER_SIZE } }