(三) 优先使用聚合,而不是继承
有一段时间,养猪场的老板雇用了清洁工人来打扫猪舍。但有一天,老板忽然对自己说"不对啊,既然我有机器人,为什么还要雇人来做这件事情?应该让机器人来打扫宿舍!"
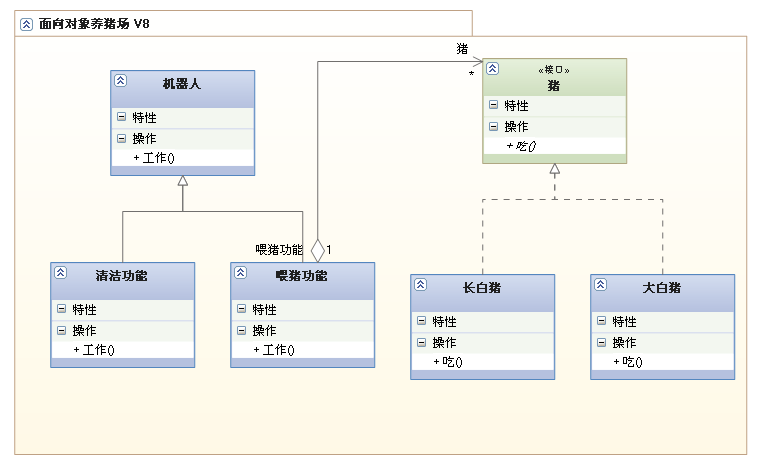
于是,这个需求被提交到了机器人的研发小组。看到这个需求,我们敏感地意识到,这是一个潜藏了更多变化的需求,未来机器人的功能还可能会不断增加,于是,我们提取出了一个抽象的机器人接口,并实现了两个具体的机器人类一-喂猪机器人和清洁机器人。系统的结构如图V8-1所示。
图V8-1
这样一来,老板希望机器人工作时,可以调用机器人接口的"工作"方法。由于这也是针对接口编程,当老板需要新的机器人时,只要添加具体的机器人类即可,其他代码无需变化。这似乎己经解决了我们遇到的问题。
但这里还存在另外一个问题:图v8-1 中的继承结构是在编译期间就确定了的,在运行期不能发生任何变化。因此,如果养猪场需要一个喂猪机器人和→个清洁机器人,那么我们必须在养猪场中放进这两个具体的机器人。依此类推,如果未来养猪场还需要兽医机器人、屠宰机器人等等,养猪场中不就挤满了机器人吗?更为重要的是,每添加一种机器人的类型,主是们就必须改动代码中的某一个地方,以便把这个机器人放进养猪场中,这就又会违反开闭原则了。在这种情况下,使用聚合的机制能很好地解决问题,因为基于聚合的结构可以在运行期间发生变化。
使用聚合机制的养猪场如图v10-1 所示。我们把机器人接口改成了功能接口,而清洁功能和喂猪功能实现了这个功能接口。真正的机器人类中聚合了一个功能接口的引用,这样,我们只需要在养猪场中放进一个机器人,该机器人中聚合了一个喂猪功能,这时它是一个喂猪机器人。当我们需要打扫养猪场时,老板只需要调用机器人中的"变形"方法,并传递一个"清洁功能"对象给机器人,机器人就会像《变形金刚》中的"擎天柱"一样,大吼一声"汽车人,变形"就变成了-个清洁机器人了。

图v10-1
面向对象养猪厂V10版本实现代码如下:
1 using System; 2 using System.Collections.Generic; 3 using System.ComponentModel; 4 using System.Data; 5 using System.Drawing; 6 using System.Linq; 7 using System.Text; 8 using System.Windows.Forms; 9 10 namespace PigFactoryV10 11 { 12 /* 13 * 猪悟能的博客 14 * http://www.cnblogs.com/hackpig/ 15 * 16 有一段时间,老板雇用清洁工人打扫猪厂,但有一天,老板对自己说“我有了机器人,为什么还要雇用人打扫猪场?” 17 于是,软件团队必须开发新的清洁机器人品种 18 这里,机器人的类型成了变化点 19 20 下面的代码使用了聚合方式,把机器人功能变成接口,只要操作员调用“变形”功能,并传入一个“清洁功能”,机器人就会 21 由喂猪机器人变身为清洁机器人。 22 如果未来要增加屠宰机器人,原有代码也不用修改。 23 24 这里反映出设计模式的第三个核心设计原则: 25 26 优先使用聚合而不是继承。 27 */ 28 29 public partial class Form1 : Form 30 { 31 public Form1() 32 { 33 InitializeComponent(); 34 btn_clean.Click += new EventHandler(btn_clean_Click); 35 btn_feed.Click += new EventHandler(btn_feed_Click); 36 } 37 38 void btn_feed_Click(object sender, EventArgs e) 39 { 40 adminMan man1 = new adminMan(1, "大润发养猪场"); 41 this.rtbMsgInfo.Text = man1.Msg; 42 } 43 44 void btn_clean_Click(object sender, EventArgs e) 45 { 46 adminMan man1 = new adminMan(2, "大润发养猪场"); 47 this.rtbMsgInfo.Text = man1.Msg; 48 } 49 } 50 51 52 public class adminMan:feedPigFactory 53 { 54 private string _msg; 55 56 public string Msg 57 { 58 get { return _msg; } 59 set { _msg = value; } 60 } 61 62 public adminMan(int funId,string factoryname) 63 { 64 base.FactoryName = factoryname; 65 robot robot1 = null; 66 switch (funId) 67 { 68 case 1: //喂食 69 robot1= new robot(); 70 IList<Ipig> list1=new List<Ipig>(); 71 list1.Add(new dbPig(1)); 72 list1.Add(new dbPig(2)); 73 list1.Add(new dbPig(3)); 74 robot1.transformation(new feedPig(list1)); 75 this._msg = robot1.work(); 76 break; 77 case 2: //清洁 78 robot1= new robot(); 79 robot1.transformation(new clean()); 80 this._msg= robot1.work(); 81 break; 82 default: 83 break; 84 } 85 } 86 87 88 } 89 90 91 public interface IfunInterface 92 { 93 string work(); 94 } 95 96 public class robot 97 { 98 private IfunInterface _robotFun; 99 100 public IfunInterface RobotFun 101 { 102 get { return _robotFun; } 103 set { _robotFun = value; } 104 } 105 106 public void transformation(IfunInterface robotFun) 107 { 108 this._robotFun = robotFun; 109 } 110 public string work() 111 { 112 return this._robotFun.work(); 113 } 114 } 115 116 117 118 119 120 public class clean : IfunInterface 121 { 122 public string work() 123 { 124 return "正在打扫清洁..."+Environment.NewLine; 125 } 126 } 127 128 public class feedPig : IfunInterface 129 { 130 IList<Ipig> pigList = new List<Ipig>(); 131 132 public feedPig(IList<Ipig> plist) 133 { 134 foreach (Ipig m in plist) 135 pigList.Add(m); 136 } 137 138 public feedPig() 139 { 140 } 141 142 public void Attack(Ipig pig) 143 { 144 pigList.Add(pig); 145 } 146 147 public string work() 148 { 149 string msgstr = string.Empty; 150 foreach (Ipig m in pigList) 151 { 152 msgstr += m.eat() + Environment.NewLine; 153 } 154 155 return string.Format("{0}{1}{2}", 156 "大润发养猪场" + Environment.NewLine, 157 "喂猪机器人开始工作...." + Environment.NewLine + Environment.NewLine, 158 msgstr); 159 } 160 } 161 162 163 164 public abstract class feedPigFactory 165 { 166 private string _factoryName; 167 168 public string FactoryName 169 { 170 get { return _factoryName; } 171 set { _factoryName = value; } 172 } 173 174 } 175 176 177 178 public interface Ipig 179 { 180 181 int PigIndex 182 { 183 get; 184 set; 185 } 186 187 string eat(); 188 189 } 190 191 192 public class cbPig : Ipig 193 { 194 private int _pigIndex; 195 196 public int PigIndex 197 { 198 get { return _pigIndex; } 199 set { _pigIndex = value; } 200 } 201 public cbPig(int pignum) 202 { 203 this._pigIndex = pignum; 204 } 205 206 public string eat() 207 { 208 return string.Format("{0}[{1}]开始吃.", "长白猪", _pigIndex); 209 } 210 } 211 212 213 214 public class dbPig : Ipig 215 { 216 private int _pigIndex; 217 218 public int PigIndex 219 { 220 get { return _pigIndex; } 221 set { _pigIndex = value; } 222 } 223 public dbPig(int pignum) 224 { 225 this._pigIndex = pignum; 226 } 227 228 public string eat() 229 { 230 return string.Format("{0}[{1}]开始吃.", "大白猪", _pigIndex); 231 } 232 } 233 234 235 236 }

运行结果如上图所示, 老板可以下达指令在喂食和清洁机器人之间切换了.
代码说明:
在这里,喂猪机器人类是把原来直接调用Work() 喂食方法, 变成了先由transformation()指定功能类型, 再来执行Work().
public class robot { private IfunInterface _robotFun; public IfunInterface RobotFun { get { return _robotFun; } set { _robotFun = value; } } public void transformation(IfunInterface robotFun) { this._robotFun = robotFun; } public string work() { return this._robotFun.work(); } }
而功能类型就是个IfunInterface接口, 而clearn(打扫清洁功能), feedPig(喂猪功能), 都是承继这个接口的.
public interface IfunInterface { string work(); }
public class clean : IfunInterface public class feedPig : IfunInterface
最后利用工厂方法, 决定了机器人在喂食,还是清洁两种功能之间切换.
public adminMan(int funId,string factoryname) { base.FactoryName = factoryname; robot robot1 = null; switch (funId) { case 1: //喂食 robot1= new robot(); IList<Ipig> list1=new List<Ipig>(); list1.Add(new dbPig(1)); list1.Add(new dbPig(2)); list1.Add(new dbPig(3)); robot1.transformation(new feedPig(list1)); this._msg = robot1.work(); break; case 2: //清洁 robot1= new robot(); robot1.transformation(new clean()); this._msg= robot1.work(); break; default: break; } }
实际上我们是聚合IfunInterface这个抽象接口,即通过指向接口类的引用来访问对象, 这种实现方法其实是综合了聚合与继承两种机制的方式
此后,当我们添加一个新的机器人种类(如兽医机器人)时,只需要添加一个兽医功能的派生类,老板就可以根据自己的需要,在任何时刻命令机器人在三个种类之间随意变形。可以看出,添加一个机器人类型时,需要改动的代码都在系统外部,系统内已有的代码不需要发生变化。这里的聚合机制使我们很好地满足了开闭原则。
总之,继承和聚合是两种各不相同也各有优缺点的机制:
- 继承反映的是类之间"……是一个……"这样的关系,它在编译期间静态定义。继承的优点是使用起来比较简单(因为面向对象的语言直接支持继承机制),对设计
人员来说比较容易理解。但继承也有缺点:
首先,你不能在运行期间改变继承树的结构,因为继承是在编译期间定义的:
其次,基类中往往定义了部分的实现,基类的实现暴露给派生类后,继承机制就会破坏数据和操作的封装,使派生类对基类产生较强的依赖O
- 聚合反映的是类之间"有-个……"或"……包含一个……"的关系,它是在运行期间动态定义的,因此,被聚合对象的类型可以很容易地在运行期间发生变化,只要我们保证它们的接口相同,满足完全替换原则即可。而且,使用聚合可以更好地封装对象,使每一个类集中在单个职能上,类的继承层次也会保持较小的规模,不会造成类数量的爆炸。聚合的缺点是它并不是面向对象语言直接支持的一个特性,用户必须编写一些代码来完成聚合功能。例如,上面机器人类中的"工作"方法就必须把消息转发给内部聚合的功能对象,即调用功能对象的"工作"方法。被聚合对象的接口必须遵从聚合类的要求,这种消息转发的方式又被称为"委托( Delegation ) "。一般来说,聚合的结构比继承更难理解一些。
从上面的分析可以看出,聚合在某些方面比继承更为优越。但我们强调聚合的作用绝不是否定继承的优点。使用聚合时,我们必须遵循针对接口编程的设计原则,不能聚合某一个具体的派生类对象,而应该聚合该类的抽象接口,即通过指向接口类的引用或指针来访问对象----这种实现方法其实是综合了聚合与继承两种机制的方式。
由此,我们可以总结出设计模式的第三个核心设计原则
继承反映的是类之间的"……是一个…"的关系,聚合反映的是类之间"…有一个……"或包含一个……"的关系。在不违反这个关系前提下,应该
优先使用聚合而不是继承, 同时,聚合也必须和接口及相关的继承结构协同使用。
全文完.
包括面向对象养猪厂的各种版本实现代码(C#示例), 和VS2010绘制的UML类图.
原创文章,出处 : http://www.cnblogs.com/hackpig/