转载:[图的最短路径算法]Dijkstra, Bellman-Ford, Floyd-Warshall
一. Dijkstra算法
⚠️ 注意:不能解决含有负权的图。
S[v]标记已访问(红色节点):queue.pop后,再标记已访问。
priority_queue优先队列:优先处理最短节点。
dis[v]:节点v到其实节点Start的最短距离。
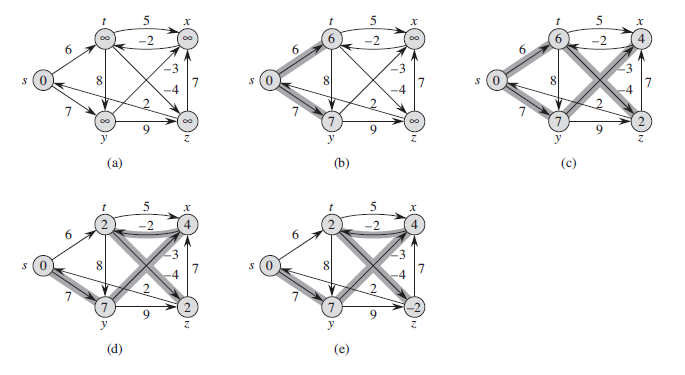
二、Bellman-Ford算法
全图松弛操作:次数最多n次(节点个数)
dis[Start]=0,else: dis[v]=∞
每次全图松弛:只可能松弛到dis[cur]!=∞的邻接节点。
因为:要判断dis[cur]+w<dis[nextn]中,dis[cur]肯定!=∞
证明该图存在负环:n次以后,若还能继续松弛:dis[cur]+w<dis[nextn]。
三、Floyd-Warshall算法
⚠️ 注意:不能处理存在负权回路的图(但可处理含有负权边的图)
算法思想原理:
Floyd算法是一个经典的动态规划算法。用通俗的语言来描述的话,首先我们的目标是寻找从点i到点j的最短路径。从动态规划的角度看问题,我们需要为这个目标重新做一个诠释(这个诠释正是动态规划最富创造力的精华所在)
从任意节点i到任意节点j的最短路径不外乎2种可能,1是直接从i到j,2是从i经过若干个节点k到j。所以,我们假设Dis(i,j)为节点u到节点v的最短路径的距离,对于每一个节点k,我们检查Dis(i,k) + Dis(k,j) < Dis(i,j)是否成立,如果成立,证明从i到k再到j的路径比i直接到j的路径短,我们便设置Dis(i,j) = Dis(i,k) + Dis(k,j),这样一来,当我们遍历完所有节点k,Dis(i,j)中记录的便是i到j的最短路径的距离。
1 typedef struct 2 { 3 char vertex[VertexNum]; //顶点表 4 int edges[VertexNum][VertexNum]; //邻接矩阵,可看做边表 5 int n,e; //图中当前的顶点数和边数 6 }MGraph; 7 8 void Floyd(MGraph g) 9 { 10 int A[MAXV][MAXV]; 11 int path[MAXV][MAXV]; 12 int i,j,k,n=g.n; 13 for(i=0;i<n;i++) 14 for(j=0;j<n;j++) 15 { 16 A[i][j]=g.edges[i][j]; 17 path[i][j]=-1; 18 } 19 for(k=0;k<n;k++) 20 { 21 for(i=0;i<n;i++) 22 for(j=0;j<n;j++) 23 if(A[i][j]>(A[i][k]+A[k][j])) 24 { 25 A[i][j]=A[i][k]+A[k][j]; 26 path[i][j]=k; 27 } 28 } 29 }