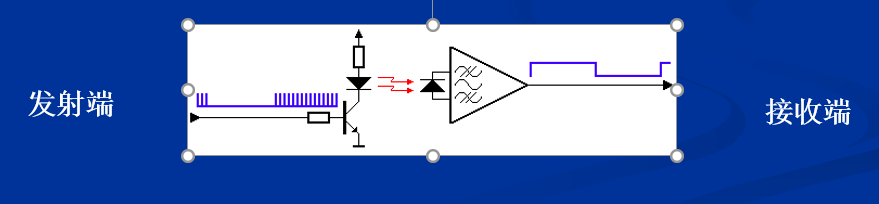
红外发光二极管。它实际上是一只特殊的发光二极管
编码方式
-
二进制脉冲码的形式有多种,其中最为常用的是PWM码(脉冲宽度调制码)和PPM码(脉冲位置调制码,脉冲串之间的时间间隔来实现信号调制)。
-
数据格式
- 数据格式包括了引导码、用户码、数据码和数据码反码,编码总占32位。数据反码是数据码反相后的编码,编码时可用于对数据的纠错。

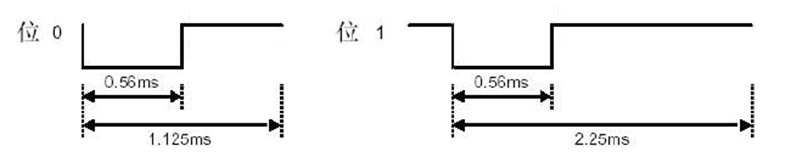
传输位定义
- 用户码或数据码中的每一个位可以是位 ‘1’ ,也可以是位 ‘0’。区分 ‘0’和 ‘1’是利用脉冲的时间间隔来区分,这种编码方式称为脉冲位置调制方式,英文简写PPM
传输过程,注意有上拉电阻,即输出端口默认为高电平

附上代码
/**************************************************************************************
* 红外通信实验 *
实现现象: 具体接线操作请参考视频
下载程序后,数码管显示红外遥控键值数据
注意事项: 红外遥控模块的短接片J1短接,
红外遥控器内的电池绝缘片一定要抽掉
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
sbit IRIN=P3^2;
u8 IrValue[6];
u8 Time;
u8 DisplayData[8];
u8 code smgduan[17]={
0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0X76};
//0、1、2、3、4、5、6、7、8、9、A、b、C、d、E、F、H的显示码
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(u16 i)
{
while(i--);
}
/*******************************************************************************
* 函数名 :DigDisplay()
* 函数功能 :数码管显示函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void DigDisplay()
{
u8 i;
for(i=0;i<3;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; break;//显示第2位
}
P0=DisplayData[i];//发送数据
delay(100); //间隔一段时间扫描
P0=0x00;//消隐
}
}
/*******************************************************************************
* 函数名 : IrInit()
* 函数功能 : 初始化红外线接收
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void IrInit()
{
IT0=1;//下降沿触发
EX0=1;//打开中断0允许
EA=1; //打开总中断
IRIN=1;//初始化端口
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
IrInit();
while(1)
{
DisplayData[0] = smgduan[IrValue[2]/16];
DisplayData[1] = smgduan[IrValue[2]%16];
DisplayData[2] = smgduan[16];
DigDisplay();
}
}
/*******************************************************************************
* 函数名 : ReadIr()
* 函数功能 : 读取红外数值的中断函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void ReadIr() interrupt 0
{
u8 j,k;
u16 err;
Time=0;
delay(700); //7ms
if(IRIN==0) //确认是否真的接收到正确的信号
{
err=1000; //1000*10us=10ms,超过说明接收到错误的信号
/*当两个条件都为真是循环,如果有一个条件为假的时候跳出循环,免得程序出错的时
侯,程序死在这里*/
while((IRIN==0)&&(err>0)) //等待前面9ms的低电平过去
{
delay(1);
err--;
}
if(IRIN==1) //如果正确等到9ms低电平
{
err=500;
while((IRIN==1)&&(err>0)) //等待4.5ms的起始高电平过去
{
delay(1);
err--;
}
for(k=0;k<4;k++) //共有4组数据
{
for(j=0;j<8;j++) //接收一组数据
{
err=60;
while((IRIN==0)&&(err>0))//等待信号前面的560us低电平过去
{
delay(1);
err--;
}
err=500;
while((IRIN==1)&&(err>0)) //计算高电平的时间长度。
{
delay(10); //0.1ms
Time++;
err--;
if(Time>30)
{
return;
}
}
IrValue[k]>>=1; //k表示第几组数据
if(Time>=8) //如果高电平出现大于565us,那么是1
{
IrValue[k]|=0x80;
}
Time=0; //用完时间要重新赋值
}
}
}
if(IrValue[2]!=~IrValue[3])
{
return;
}
}
}