在模拟控制系统中,控制器最常用的控制规律是PID控制。模拟PID控制系统原理框图如下图。系统由模拟PID控制器和被控对象组成。
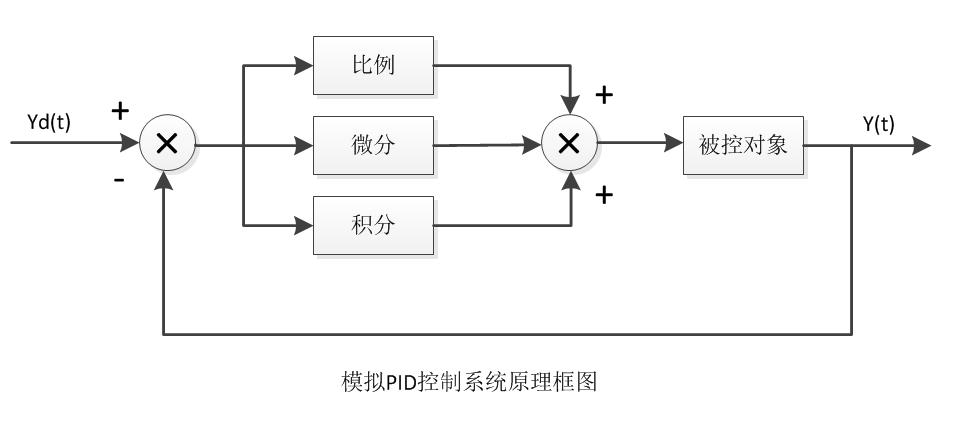
PID控制器是一种线性控制器,它根据给定值Yd(t)与实际输出值Y(t)构成控制偏差:err = Yd - Y .
PID的控制规律为:

式中,Kp——比例系数; Ti——积分时间常数; TD——微分时间常数。
简单来说,PID控制器各校正环节的作用如下:
(1)比例环节:成比例地反映控制系统的偏差信号error(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。