在开始学习动态规划的时候我总有这些问题:动态规划能解决什么问题?解决动态规划的思考过程是怎么样的?贪心、分治、回溯、动态规划这四种算法之间有什么区别和联系?
在解决这些问题之前,我要提一个理论:“一个模型三个特征”,即“多阶段决策最优解”模型,“最优子结构”、“无后效性”、“重复子问题”特征。
1.最优子结构
问题的解包含子问题的最优解。反过来说也就是,我们可以通过子问题的最优解,推导出问题的最优解。
2.无后效性
第一层含义是,在推到后面阶段的状态的时候,我们只关心前面阶段的状态值,不关心这个状态是怎么推导出来的;第二层含义是,某阶段的状态一旦确定,就不受之后阶段的决策影响。
3.重复子问题
不同的决策序列,到达某个相同的阶段时,可能会产生重复的状态。
这里用一个具体的动态规划问题来解释这个模型。
以 leetcode 64题为例:
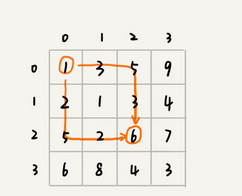
给定一个包含非负整数的 m x n 网格,请找出一条从左上角到右下角的路径,使得路径上的数字总和为最小。 说明:每次只能向下或者向右移动一步 输入: [ [1,3,1], [1,5,1], [4,2,1] ] 输出: 7 解释: 因为路径 1→3→1→1→1 的总和最小。
一个模型
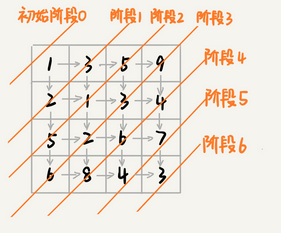
如图所示,每个阶段都有向右走或者向下走的俩种决策,每个阶段都会对应一个状态集合,我们把状态定义为min_dist(i,j),其中i表示行,j表示列,min_dist(i,j)表示为走到matirx[i,j]时的最短距离,这就成了一个多阶段决策最优解问题,符合动态规划模型。
重复子问题:
如果将其使用回溯算法解决这个问题,在递归树中会出现重复节点,即到达这一步,会有多种路线,说明这个问题中存在重复子问题。
无后效性:
走到(i,j)这个位置,只能通过(i-1,j),(i,j-1)这两个位置移动过来,也就是说,想要计算(i,j)位置对应的状态,只需要关心(i-1,j),(i,j-1)俩个位置对应的状态,而且并不关心棋子是通过说明路线到达这俩个位置的。
最优子结构:
min_dist(i,j) = w[i][j] + min(min_dist(i,j-1),min_dist(i-1,j)),也就是说,最短路径min_dist(i,j)肯定也包含到达这俩个位置(i,j-1)或(i-1,j)的最短路径之一。换句话说,min_dist(i,j)可以通过min_dist9i-1,j)或min_dist(i-1,j)两个状态推导出来。