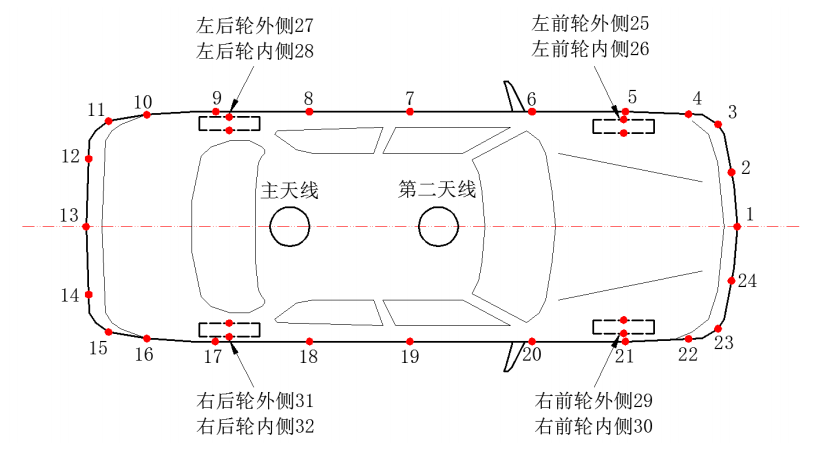
考试车辆模型测绘图
小型汽车模型测绘点示意图见下图,图中2号点~12号点、14号点~24号点分别分布于车身左侧和 右侧,应能反映车身轮廓特征和车宽尺寸。
通用要求
| 检测评判项 |
判定结果要求 |
检测精度要求 |
| 不按规定使用安全带 |
不合格 |
|
| 不按考试员指令驾驶 |
不合格 |
|
| 启动发动机时挡位未置于空挡(驻车挡) |
不合格 |
|
| 发动机启动后,不及时松开启动开关 |
每次扣10分 |
时间大于2 s,时间检测误差:0 s~+0.5 s |
| 因操作不当造成发动机熄火一次 |
扣10分 |
|
注意 :通用要求适用于从科目考试开始到考试结束的整个过程
倒车入库
| 检测评判项 |
判定结果要求 |
检测精度要求 |
| 不按规定路线、顺序行驶 |
不合格 |
|
| 车身出线 |
不合格 |
距离检测误差:边线基准线向外0 mm~+50 mm |
| 倒库不入 |
不合格 |
|
| 在倒车前,未将两个前轮触地点均驶过控制线 |
不合格 |
|
| 项目完成时间超过210 s |
不合格 |
从倒车开始至回到起始点且两个 前轮触地点均驶过控制线,时间 检测误差:0 s~+1 s |
| 中途停车时间超过2 s |
每次扣5分 |
时间检测误差:0 s~+0.5 s |
侧方停车
| 检测评判项 |
判定结果要求 |
检测精度要求 |
| 车辆入库停止后,车身出线 |
不合格 |
距离检测误差:边线基准线向外0 mm~+50 mm |
| 项目完成时间超过90 s |
不合格 |
从倒车开始至车辆出库后车身最 后端驶过前库位线位置,时间检 测误差:0 s~+1 s |
| 行驶中车轮触轧车道边线 |
每次扣10分 |
距离检测误差:边线内侧向外0 mm~+50 mm |
| 行驶中车身触碰库位边线 |
每次扣10分 |
距离检测误差:边线基准线向外0 mm~+50 mm |
| 出库时不使用或错误使用转向灯 |
扣10分 |
|
| 中途停车时间超过2 s |
每次扣5分 |
时间检测误差:0 s~+0.5 s |
坡道定点停车和起步
| 检测评判项 |
判定结果要求 |
检测精度要求 |
| 车辆停止后,汽车前保险杠未定于桩杆线上,且 前后超出50 cm |
不合格 |
距离检测误差:0 mm~+50 mm |
| 行驶中车轮轧道路边缘线 |
不合格 |
距离检测误差:边线内侧向外0 mm~+50 mm |
| 车辆停止后,车身距离路边缘线超出50 cm |
不合格 |
距离检测误差:0 mm~+50 mm |
| 车辆停止后,起步时间超过30 s |
不合格 |
时间检测误差:0 s~+1 s |
| 起步时车辆后溜距离大于30 cm |
不合格 |
距离检测误差:0 mm~+50 mm |
| 车辆停止后,汽车前保险杠未定于桩杆线上,且 前后不超出50 cm |
扣10分 |
距离检测误差:0 mm~+50 mm |
| 车辆停止后,车身距离路边缘线超出30 cm,未 超出50 cm |
扣10分 |
距离检测误差:0 mm~+50 mm |
| 停车后,未拉紧驻车制动器 |
扣10分 |
|
| 起步时车辆后溜距离10 cm~30 cm |
扣10分 |
距离检测误差:0 mm~+50 mm |
曲线行驶
| 检测评判项 |
判定结果要求 |
检测精度要求 |
| 车轮轧道路边缘线 |
不合格 |
距离检测误差:边线内侧向外0 mm~+50mm |
| 中途停车时间超过2 s |
不合格 |
时间检测误差:0 s~+0.5 s |
直角转弯
| 检测评判项 |
判定结果要求 |
检测精度要求 |
| 车轮轧道路边缘线 |
不合格 |
距离检测误差:边线内侧向外0 mm~+50mm |
| 转弯时不使用或错误使用转向灯,转弯后不关闭 转向灯 |
扣10分 |
|
| 中途停车时间超过2 s |
每次扣5分 |
时间检测误差:0 s~+0.5 s |
参考资料:《GA/T 1028.3—2017 机动车驾驶人考试系统通用技术条件 第 3 部分:场地驾驶技能考试系统》