参考地址:https://blog.csdn.net/miracle_ma/article/details/78305991
使用DCGAN(deep convolutional GAN):深度卷积GAN
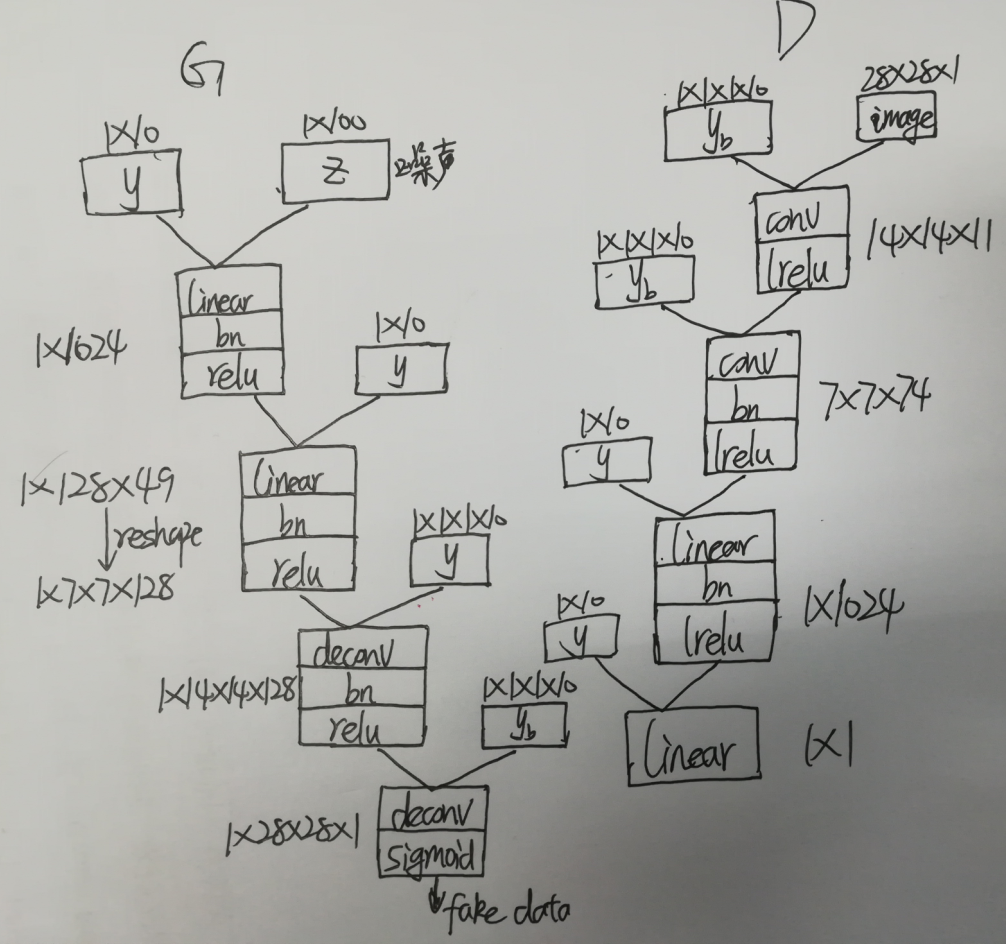
网络结构如下:
代码分成四个文件:
- 读入文件 read_data.py
- 配置线性层,卷积层,反卷积层 ops.py
- 构建生成器和判别器模型 model.py
- 训练模型 train.py
使用的layer种类有:
- conv(卷积层)
- deconv(反卷积层)
- linear(线性层)
- batch_norm(批量归一化层)
- lrelu/relu/sigmoid(非线性函数层)
一、读入文件(read_data.py)
import os import numpy as np import tensorflow as tf def read_data(): data_dir = "datamnist" #read training data fd = open(os.path.join(data_dir,"train-images.idx3-ubyte")) loaded = np.fromfile(file = fd, dtype = np.uint8) trainX = loaded[16:].reshape((60000, 28, 28, 1)).astype(np.float) fd = open(os.path.join(data_dir,"train-labels.idx1-ubyte")) loaded = np.fromfile(file = fd, dtype = np.uint8) trainY = loaded[8:].reshape((60000)).astype(np.float) #read test data fd = open(os.path.join(data_dir,"t10k-images.idx3-ubyte")) loaded = np.fromfile(file = fd, dtype = np.uint8) testX = loaded[16:].reshape((10000, 28, 28, 1)).astype(np.float) fd = open(os.path.join(data_dir,"t10k-labels.idx1-ubyte")) loaded = np.fromfile(file = fd, dtype = np.uint8) testY = loaded[8:].reshape((10000)).astype(np.float) # 将两个集合合并成70000大小的数据集 X = np.concatenate((trainX, testX), axis = 0) y = np.concatenate((trainY, testY), axis = 0) print(X[:2]) #set the random seed seed = 233 np.random.seed(seed) np.random.shuffle(X) np.random.seed(seed) np.random.shuffle(y) return X/255, y
新建一个data文件夹,存放mnist数据集。读入训练集和测试集,将两个集合合并成一个70000的数据集,设置相同的随机种子,保证两个集合随机成相同的顺序。最后把X归一化到 [0, 1] 之间
二、配置线性层,卷积层,反卷积层 (ops.py)
import tensorflow as tf from tensorflow.contrib.layers.python.layers import batch_norm as batch_norm def linear_layer(value, output_dim, name = 'linear_connected'): with tf.variable_scope(name): try: # 线性层的权重 # 名称:weights # shape = [int(value.get_shape()[1]), output_dim], 我们需要传入最后输出多少维,也即是output_dim的值 # 初始化:使用标准正态截断函数 标准差是0.02 weights = tf.get_variable('weights', [int(value.get_shape()[1]), output_dim], initializer = tf.truncated_normal_initializer(stddev = 0.02)) # 线性层的偏置 # 名称:biases # shape = [output_dim], 偏置与输出的维度相同 # 初始化:使用常量初始化 初始化为0 biases = tf.get_variable('biases', [output_dim], initializer = tf.constant_initializer(0.0)) except ValueError: tf.get_variable_scope().reuse_variables() weights = tf.get_variable('weights', [int(value.get_shape()[1]), output_dim], initializer = tf.truncated_normal_initializer(stddev = 0.02)) biases = tf.get_variable('biases', [output_dim], initializer = tf.constant_initializer(0.0)) return tf.matmul(value, weights) + biases def conv2d(value, output_dim, k_h = 5, k_w = 5, strides = [1,1,1,1], name = "conv2d"): with tf.variable_scope(name): try: # 反卷积层的权重 # 名称:weights # [5, 5, 输入的维度, 输出的维度] # 初始化:使用标准正态截断函数 标准差是0.02 weights = tf.get_variable('weights', [k_h, k_w, int(value.get_shape()[-1]), output_dim], initializer = tf.truncated_normal_initializer(stddev = 0.02)) # 线性层的偏置 # 名称:biases # shape = [output_shape[-1]], 偏置与输出的维度相同 # 初始化:使用常量初始化 初始化为0 biases = tf.get_variable('biases', [output_dim], initializer = tf.constant_initializer(0.0)) except ValueError: tf.get_variable_scope().reuse_variables() weights = tf.get_variable('weights', [k_h, k_w, int(value.get_shape()[-1]), output_dim], initializer = tf.truncated_normal_initializer(stddev = 0.02)) biases = tf.get_variable('biases', [output_dim], initializer = tf.constant_initializer(0.0)) conv = tf.nn.conv2d(value, weights, strides = strides, padding = "SAME") conv = tf.reshape(tf.nn.bias_add(conv, biases), conv.get_shape()) return conv def deconv2d(value, output_shape, k_h = 5, k_w = 5, strides = [1,1,1,1], name = "deconv2d"): with tf.variable_scope(name): try: # 反卷积层的权重 # filter : [height, width, output_channels, in_channels] # 名称:weights # [5, 5, 输出的维度, 输入的维度] # 初始化:使用标准正态截断函数 标准差是0.02 weights = tf.get_variable('weights', [k_h, k_w, output_shape[-1], int(value.get_shape()[-1])], initializer = tf.truncated_normal_initializer(stddev = 0.02)) # 线性层的偏置 # 名称:biases # shape = [output_shape[-1]], 偏置与输出的维度相同 # 初始化:使用常量初始化 初始化为0 biases = tf.get_variable('biases', [output_shape[-1]], initializer = tf.constant_initializer(0.0)) except ValueError: tf.get_variable_scope().reuse_variables() weights = tf.get_variable('weights', [k_h, k_w, output_shape[-1], int(value.get_shape()[-1])], initializer = tf.truncated_normal_initializer(stddev = 0.02)) biases = tf.get_variable('biases', [output_shape[-1]], initializer = tf.constant_initializer(0.0)) deconv = tf.nn.conv2d_transpose(value, weights, output_shape, strides = strides) deconv = tf.reshape(tf.nn.bias_add(deconv, biases), deconv.get_shape()) return deconv def conv_cond_concat(value, cond, name = 'concat'): value_shapes = value.get_shape().as_list() cond_shapes = cond.get_shape().as_list() with tf.variable_scope(name): return tf.concat([value, cond * tf.ones(value_shapes[0:3] + cond_shapes[3:])], 3, name = name) # 批量归一化层 def batch_norm_layer(value, is_train = True, name = 'batch_norm'): with tf.variable_scope(name) as scope: if is_train: return batch_norm(value, decay = 0.9, epsilon = 1e-5, scale = True, is_training = is_train, updates_collections = None, scope = scope) else : return batch_norm(value, decay = 0.9, epsilon = 1e-5, scale = True, is_training = is_train, reuse = True, updates_collections = None, scope = scope) def lrelu(x, leak = 0.2, name = 'lrelu'): with tf.variable_scope(name): return tf.maximum(x, x*leak, name = name)
主要就是配置各个层的权重和参数,conv_cond_concat是为了用于卷积层计算的四维数据[batch_size, w, h, c]和约束条件y连接起来的操作,需要把两个数据的前三维转化到一样大小才能使用tf.concat(拼接函数)
lrelu是relu的改良版。代码中a = 0.2

三、构建生成器和判别器模型(model.py)
import tensorflow as tf from ops import * BATCH_SIZE = 64 # 生成器模型 def generator(z, y,train = True): with tf.variable_scope('generator', reuse=tf.AUTO_REUSE): # 生成器的输入,z是 1 * 100 维的噪声 yb = tf.reshape(y, [BATCH_SIZE, 1, 1, 10], name = 'g_yb') # 将噪声 z 和 y 拼接起来 z_y = tf.concat([z,y], 1, name = 'g_z_concat_y') # 经过线性层,z_y 变成1024维 linear1 = linear_layer(z_y, 1024, name = 'g_linear_layer1') # 先批量归一化,然后经过relu层,得 bn1 bn1 = tf.nn.relu(batch_norm_layer(linear1, is_train = True, name = 'g_bn1')) # 将 bn1 与 y 拼接在一起 bn1_y = tf.concat([bn1, y], 1 ,name = 'g_bn1_concat_y') # 经过线性层,变成128 * 49 linear2 = linear_layer(bn1_y, 128*49, name = 'g_linear_layer2') # 先批量归一化,然后经过relu层,得 bn2 bn2 = tf.nn.relu(batch_norm_layer(linear2, is_train = True, name = 'g_bn2')) # reshape成 7 * 7 * 128 bn2_re = tf.reshape(bn2, [BATCH_SIZE, 7, 7, 128], name = 'g_bn2_reshape') # 将 bn2_re 与 yb 连接起来 bn2_yb = conv_cond_concat(bn2_re, yb, name = 'g_bn2_concat_yb') # 经过反卷积 步长设为2,height和width 都翻倍 deconv1 = deconv2d(bn2_yb, [BATCH_SIZE, 14, 14, 128], strides = [1, 2, 2, 1], name = 'g_deconv1') # 先批量归一化,然后经过relu层,得 bn3 bn3 = tf.nn.relu(batch_norm_layer(deconv1, is_train = True, name = 'g_bn3')) # 将 bn2_re 与 yb 连接起来 bn3_yb = conv_cond_concat(bn3, yb, name = 'g_bn3_concat_yb') # 经过反卷积 步长设为2,height和width 都翻倍 deconv2 = deconv2d(bn3_yb, [BATCH_SIZE, 28, 28, 1], strides = [1, 2, 2, 1], name = 'g_deconv2') # 经过sigmoid层 return tf.nn.sigmoid(deconv2) # 判别器模型 def discriminator(image, y, reuse=tf.AUTO_REUSE, train = True): with tf.variable_scope('discriminator', reuse=tf.AUTO_REUSE): # 判别器有两个输入,一个是真实图片,另一个是生成的图片,都是 28 * 28 yb = tf.reshape(y, [BATCH_SIZE, 1, 1, 10], name = 'd_yb') # 将 image 与 yb 连接起来 image_yb = conv_cond_concat(image, yb, name = 'd_image_concat_yb') # 卷积:步长为2 14 * 14 * 11 conv1 = conv2d(image_yb, 11, strides = [1, 2, 2, 1], name = 'd_conv1') # 经过 lrelu 层 lr1 = lrelu(conv1, name = 'd_lrelu1') # 将 lr1 与 yb 连接起来 lr1_yb = conv_cond_concat(lr1, yb, name = 'd_lr1_concat_yb') # 卷积:步长为2 7 * 7 * 74 conv2 = conv2d(lr1_yb, 74, strides = [1, 2, 2, 1], name = 'd_conv2') # 批量归一化 bn1 = batch_norm_layer(conv2, is_train = True, name = 'd_bn1') # 经过 lrelu 层 lr2 = lrelu(bn1, name = 'd_lrelu2') lr2_re = tf.reshape(lr2, [BATCH_SIZE, -1], name = 'd_lr2_reshape') # 将 lr2_re 与 y 连接起来 lr2_y = tf.concat([lr2_re, y], 1, name = 'd_lr2_concat_y') # 经过线性层 变成 1 * 1024 linear1 = linear_layer(lr2_y, 1024, name = 'd_linear_layer1') # 批量归一化 bn2 = batch_norm_layer(linear1, is_train = True, name = 'd_bn2') # 经过 lrelu 层 lr3 = lrelu(bn2, name = 'd_lrelu3') lr3_y = tf.concat([lr3, y], 1, name = 'd_lr3_concat_y') linear2 = linear_layer(lr3_y, 1, name = 'd_linear_layer2') return linear2 def sampler(z, y, train = True): tf.get_variable_scope().reuse_variables() return generator(z, y, train = train)
按照模型图实现生成器G,返回时用到了sigmoid,将输出值规范到(0, 1)与前面输入图像的范围一致。
判别器D:
1、 设置reuse变量(变量重复使用)。判别器有两个输入。对于同一个D,先喂给它real data(真实的图像),然后喂给它fake data(生成器生成的假图像)。在一次train_step里涉及到了两次D变量的重复使用,所以需要设置变量共享。
2、返回值没有使用sigmoid,因为训练中使用了sigmoid_cross_entropy_with_logits来计算loss
四、训练模型
import scipy.misc import numpy as np import tensorflow as tf import os from read_data import * from ops import * from model import * BATCH_SIZE = 64 # 保存图片,将图片拼接在一起 def save_images(images, size, path): img = (images + 1.0)/2.0 h, w = img.shape[1], img.shape[2] merge_img = np.zeros((h * size[0], w * size[1], 3)) for idx, image in enumerate(images): i = idx % size[1] j = idx // size[1] merge_img[j*h:j*h+h,i*w:i*w+w,:] = image return scipy.misc.imsave(path, merge_img) def train(): #read data X, Y = read_data() #global_step to record the step of training global_step = tf.Variable(0, name = 'global_step', trainable = True) # 创建placeholder y = tf.placeholder(tf.int32, [BATCH_SIZE], name = 'y') _y = tf.one_hot(y, depth = 10, on_value=None, off_value=None, axis=None, dtype=None, name='one_hot') z = tf.placeholder(tf.float32, [BATCH_SIZE, 100], name = 'z') images = tf.placeholder(tf.float32, [BATCH_SIZE, 28, 28, 1], name = 'images') # 用噪声生成图片 G = generator(z, _y) # 用真实图片训练判别器 D = discriminator(images, _y) # 用生成的加图片G训练判别器 _D = discriminator(G, _y) # 计算损失值,使用 sigmoid_cross_entropy_with_logits # 真实图片在判别器里产生的loss,我们希望真实图片在判别器里的label趋向于1 d_loss_real = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits = D, labels = tf.ones_like(D))) # 假图片在判别器里产生的loss,我们希望假图片在判别器里的label趋向于0 d_loss_fake = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits = _D, labels = tf.zeros_like(_D))) # 假图片在判别器上的结果,我们希望它以假乱真,希望它尽可能接近于1 g_loss = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits = _D, labels = tf.ones_like(_D))) # 判别器的总 loss d_loss = d_loss_real + d_loss_fake t_vars = tf.trainable_variables() d_vars = [var for var in t_vars if 'd_' in var.name] g_vars = [var for var in t_vars if 'g_' in var.name] with tf.variable_scope(tf.get_variable_scope(), reuse = False): # 优化判别器的 loss d_optim = tf.train.AdamOptimizer(0.0002, beta1 = 0.5).minimize(d_loss, var_list = d_vars, global_step = global_step) # 优化生成器的 loss g_optim = tf.train.AdamOptimizer(0.0002, beta2 = 0.5).minimize(g_loss, var_list = g_vars, global_step = global_step) #tensorborad train_dir = 'logs' z_sum = tf.summary.histogram("z",z) d_sum = tf.summary.histogram("d",D) d__sum = tf.summary.histogram("d_",_D) g_sum = tf.summary.histogram("g", G) d_loss_real_sum = tf.summary.scalar("d_loss_real", d_loss_real) d_loss_fake_sum = tf.summary.scalar("d_loss_fake", d_loss_fake) g_loss_sum = tf.summary.scalar("g_loss", g_loss) d_loss_sum = tf.summary.scalar("d_loss", d_loss) g_sum = tf.summary.merge([z_sum, d__sum, g_sum, d_loss_fake_sum, g_loss_sum]) d_sum = tf.summary.merge([z_sum, d_sum, d_loss_real_sum, d_loss_sum]) #initial init = tf.global_variables_initializer() sess = tf.InteractiveSession() writer = tf.summary.FileWriter(train_dir, sess.graph) #save saver = tf.train.Saver() # 保存模型 check_path = "./save/model.ckpt" #sample sample_z = np.random.uniform(-1, 1, size = (BATCH_SIZE, 100)) sample_labels = Y[0:BATCH_SIZE] #make sample sample = sampler(z, _y) #run sess.run(init) #saver.restore(sess.check_path) #train for epoch in range(10): batch_idx = int(70000/64) for idx in range(batch_idx): batch_images = X[idx*64:(idx+1)*64] batch_labels = Y[idx*64:(idx+1)*64] batch_z = np.random.uniform(-1, 1, size = (BATCH_SIZE, 100)) _, summary_str = sess.run([d_optim, d_sum], feed_dict = {images: batch_images, z: batch_z, y: batch_labels}) writer.add_summary(summary_str, idx+1) _, summary_str = sess.run([g_optim, g_sum], feed_dict = {images: batch_images, z: batch_z, y: batch_labels}) writer.add_summary(summary_str, idx+1) d_loss1 = d_loss_fake.eval({z: batch_z, y: batch_labels}) d_loss2 = d_loss_real.eval({images: batch_images, y:batch_labels}) D_loss = d_loss1 + d_loss2 G_loss = g_loss.eval({z: batch_z, y: batch_labels}) #every 20 batch output loss if idx % 20 == 0: print("Epoch: %d [%4d/%4d] d_loss: %.8f, g_loss: %.8f" % (epoch, idx, batch_idx, D_loss, G_loss)) #every 100 batch save a picture if idx % 100 == 0: sap = sess.run(sample, feed_dict = {z: sample_z, y: sample_labels}) samples_path = './sample/' save_images(sap, [8,8], samples_path+'test_%d_epoch_%d.png' % (epoch, idx)) #every 500 batch save model if idx % 500 == 0: saver.save(sess, check_path, global_step = idx + 1) sess.close() if __name__ == '__main__': train()
模型的训练顺序是先generator生成fake data,然后real data喂给D训练,再把fake data喂给D训练
分别计算生成器和判别器的loss,其中判别器的loss = real loss + fake loss
一个batch中,训练一次D训练一次G。按理说应该训练k次D,训练一次G(为了方便就没有这么做了)
生成的效果图如下: