论文名称:CenterNet: Keypoint Triplets for Object Detectiontection
论文链接:https://arxiv.org/abs/1904.08189
代码链接:https://github.com/Duankaiwen/CenterNet
简介
该论文是由中科院,牛津大学以及华为诺亚方舟实验室联合提出。截至目前(2019.04.19),CenterNet应该是one-stage目标检测方法中性能(精度)最好的方法。
传统的基于关键点的目标检测方法例如最具代表性的CornerNet通过检测物体的左上角点和右下角点来确定目标,但在确定目标的过程中,无法有效利用物体的内部的特征,即无法感知物体内部的信息,从而导致该类方法产生了很多误检 (错误目标框)。
本文利用关键点三元组即中心点、左上角点和右下角点三个关键点而不是两个点来确定一个目标,使网络花费了很小的代价便具备了感知物体内部信息的能力,从而能有效抑制误检。另外,为了更好的检测中心点和角点,该论文分别提出了center pooling和cascade corner pooling来提取中心点和角点的特征。该方法在MS COCO上,获得了47% AP,超过了所有已知的 one-stage 检测方法,并大幅度领先,其领先幅度至少达4.9%,推理时间略慢(270ms using a 52-layer hourglass backbone and 340ms using a 104-layer hourglass backbone per image)。
Anchor-based缺陷:anchor数量巨大,anchor人工自主设计,anchor与gt不对齐不利于分类
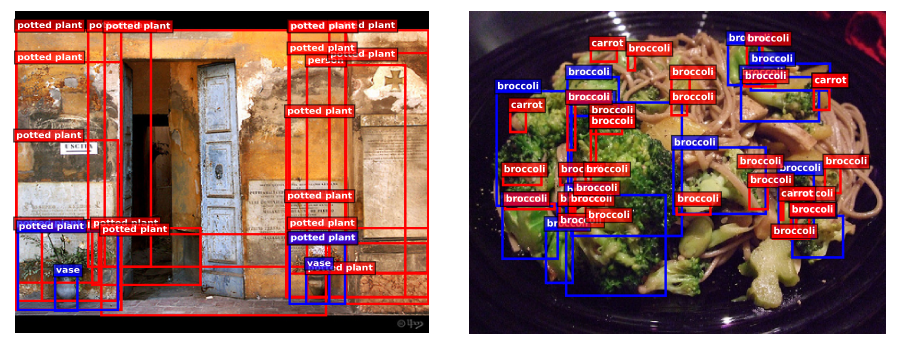
Anchor-free缺陷:Cornernet的全局信息获取能力较弱,无法正确group同一物体的两个点如上图,前100个预测框中有很多是长宽比不协调的误检(CornerNet通过embedding vector来group角点,但是该机制通过corner pooling仅依赖物体的边沿,并没有利用物体内部信息,事实证明根据人类vision pattern确定一个物体更多考虑其内部信息),这个问题可以通过互补信息解决——比如aspect ratio(anchor利用宽高比加速回归,但是角点无法)
CenterNet原理
预测框与gt有高iou并且gt的中心在预测框的中心区域,则这个预测框有更高的可能性是准确的,所以通过判断一个proposal的中心区域是否包含一个同类物体的中心点来决定它是否正确。如下图:

提出更好的两种检测角点和中心点的机制center pooling和cascade corner pooling。center pooling用于预测中心点分支,通过相加特征图水平和垂直方向上最大值获得。cascade corner pooling类似与原来的corner pooling模块,只不过同时获取内部和边沿信息以增加稳定性。
Baseline and Motivation
使用CornerNet作为基准,CornerNet使用heatmaps、embeddings、offsets确定目标的左上右下角点以确定物体位置类别,具体不予阐述,可参考博主另一篇博文CornerNet论文笔记
为了能够量化的分析误检问题,本论文提出了一种新的衡量指标,称为FD (false discovery) rate, 此指标能够很直观的反映出误检情况。FD rate 的计算方式为 FD = 1-AP, 其中 AP 为 IoU 阈值取[0.05 : 0.05 : 0.5]下的平均精度。统计了 CornerNet 的误检情况,如下表table1所示:
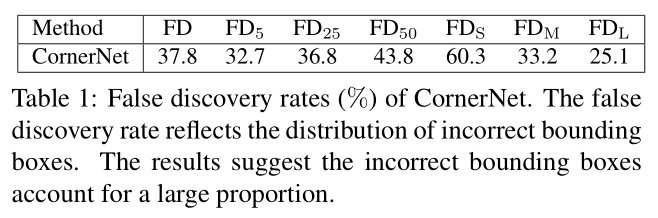
可以看到,FD = 37.8,而FD5高达32.7,这意味着即使把gt匹配条件限制的很严格:只有那些与 ground-truth 的 IoU< 0.05 的才被认定为错误目标框,每100个预测框中仍然平均有32.7 个错误目标框!而小尺度的目标框其FDs更是达到了60.3!关键问题在于让网络具备感知物体内部信息的能力。一个较容易想到的方法是把 CornerNet 变成一个 two-stage 的方法,即利用 RoI pooling 或 RoI align 提取预测框的内部信息,从而获得感知能力。但这样做开销很大,因此本文提出了用关键点三元组来检测目标,这样使得本文在 one-stage 的前提下就能获得感知物体内部信息的能力。并且开销较小,因为只需关注物体的中心,从而避免了 RoI pooling 或 RoI align 关注物体内部的全部信息。
方法介绍
利用关键点三元组检测物体

上图figure2为 CenterNet 的结构图。网络通过 center pooling 和 cascade corner pooling 分别得到 center heatmap 和 corner heatmaps,用来预测关键点的位置。得到角点的位置和类别后,通过 offsets 将角点的位置映射到输入图片的对应位置,然后通过 embedings 判断哪两个角点属于同一个物体,以便组成一个检测框。正如前文所说,组合过程中由于缺乏来自目标区域内部信息的辅助,从而导致大量的误检。为了解决这一问题,CenterNet 不仅预测角点,还预测中心点。对每个预测框定义一个中心区域,通过判断每个目标框的中心区域是否含有中心点,若有则保留,并且此时框的 confidence 为中心点、左上角点和右下角点的confidence的平均,若无则去除,使得网络具备感知目标区域内部信息的能力,能够有效除错误的目标框。
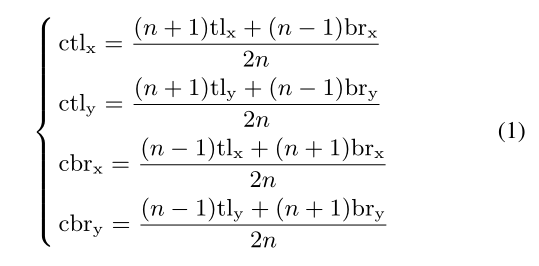
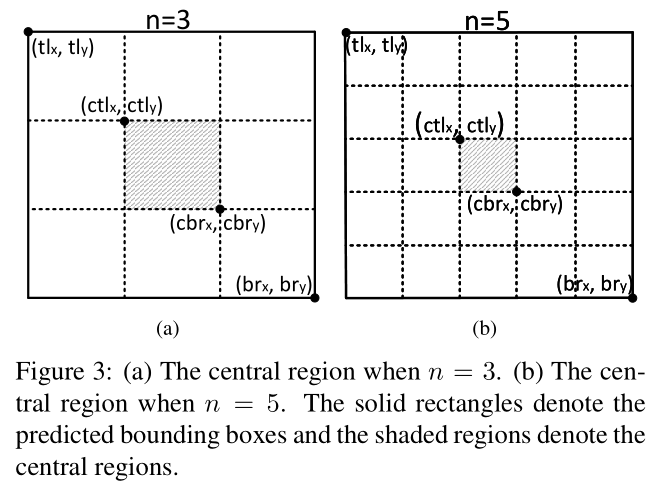
另外中心区域的尺度会影响错误框去除效果。中心区域过小导致很多小尺度的错误目标框无法被去除,而中心区域过大导致很多大尺度的错误目标框无法被去除,因此本文提出了尺度可调节的中心区域定义法如下公式(1)。该方法可以在预测框的尺度较大时定义一个相对较小的中心区域,在预测框的尺度较小时预测一个相对较大的中心区域。如下图figure3所示,n的值根据边界框是否大于150进行设置为3或5。
丰富中心点和角点特征
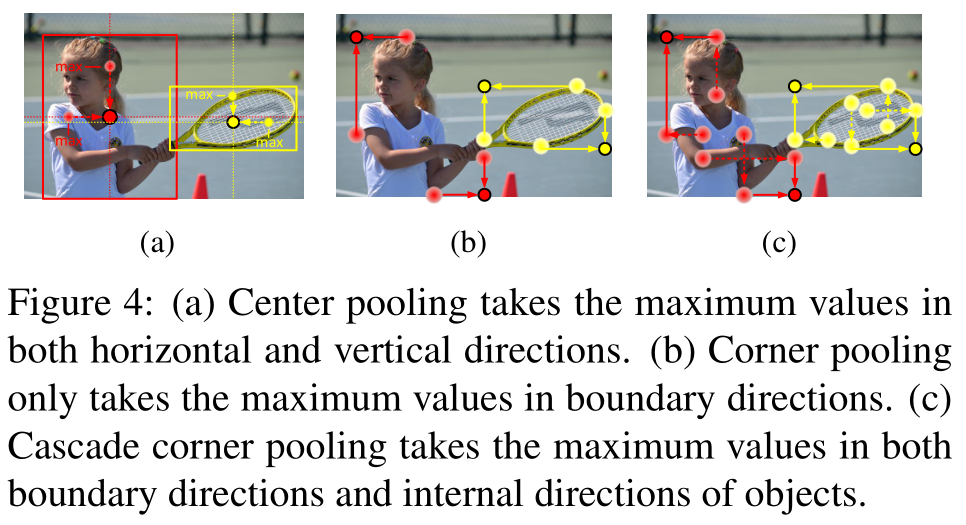
Center pooling:一个物体的中心并不一定含有很强的,易于区分于其他类别的语义信息。例如,一个人的头部含有很强的,易于区分于其他类别的语义信息,但是其中心往往位于人的中部。本文提出了center pooling 来丰富中心点特征。上图figure4(a)为该方法原理,center pooling提取中心点水平方向和垂直方向的最大值并相加,以此给中心点提供所处位置以外的信息。这一操作使中心点有机会获得更易于区分于其他类别的语义信息。Center pooling 可通过不同方向上的 corner pooling 的组合实现。一个水平方向上的取最大值操作可由 left pooling 和 right pooling通过串联实现,同理,一个垂直方向上的取最大值操作可由 top pooling 和 bottom pooling通过串联实现,具体操作如下图figure5(a)所示,特征图两个分支分别经过一个3×3Conv-BN-ReLU做水平方向和垂直方向的corner pooling,最后再相加(图b为Cascade corner pooling模块,注意与图(a)并没有连接)。
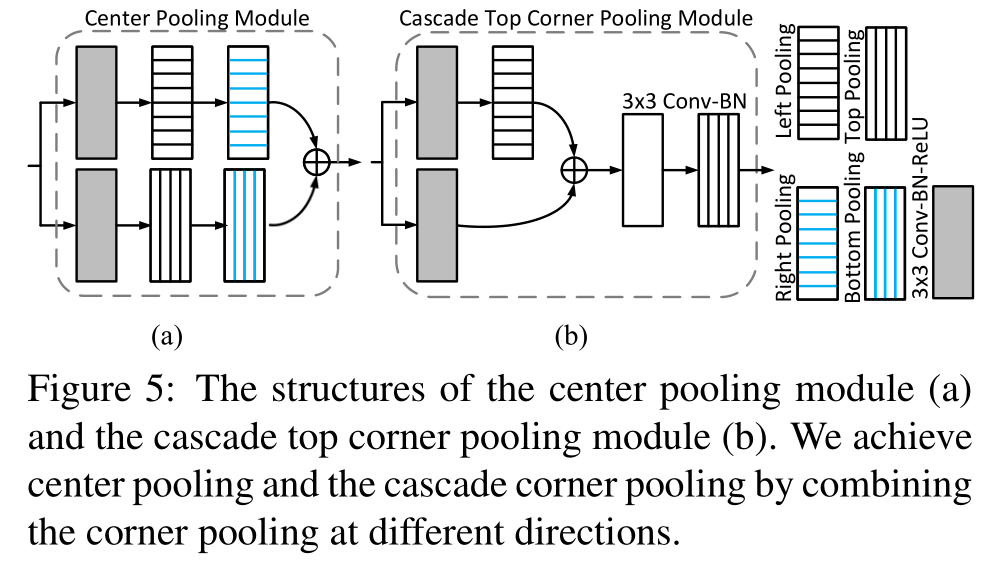
Cascade corner pooling: 该模块用于预测物体的左上和右下角点,一般情况下角点位于物体外部,所处位置并不含有关联物体的语义信息,这为角点的检测带来了困难。Figure4(b)为传统做法,称为corner pooling(CornerNet中提出)。它提取物体边界最大值并相加,该方法只能提供关联物体边缘语义信息,对于更加丰富的物体内部语义信息则很难提取到。Figure4 (c)为cascade corner pooling 原理,它首先提取物体边界最大值,然后在边界最大值处继续向内部(图中沿虚线方向)提取最大值,并与边界最大值相加,以此给角点特征提供更加丰富的关联物体语义信息。Cascade corner pooling可通过不同方向上的 corner pooling 的组合实现,如图figure5(b)所示,展示了cascade top corner pooling 原理(博主认为Cascade corner pooling只是为了通过内部信息丰富角点特征,也就是级联不同方向的corner pooling达到内部信息的叠加,最终目的还是要预测角点,所以左上角点通过cascade top corner pooling+cascade left corner pooling实现,右下角点通过cascade right corner pooling+cascade bottom corner pooling实现,figure5(b)只是画出了其中一个module,其他3个module类似,也就是用cascade corner pooling module代替原CornerNet中的Corner Pooling)。
训练和推理
![]()
损失函数如上式(2),由角点位置损失(focal loss)+中心点位置损失+embedding损失+角点和中心点offsets损失(l1loss)组成,结构与CornerNet相似,只是增加中心点损失项,α,β和γ分别为0.1,,01,1。使用batch size为48在8 Tesla V100 (32GB) GPUs上迭代480K次,前450K次学习率为2.5×10-4,后30K次学习率降为2.5×10-5。代码使用pytorch实现,没有预训练,输出分辨率为511×511,损失函数优化策略为adam。
实验
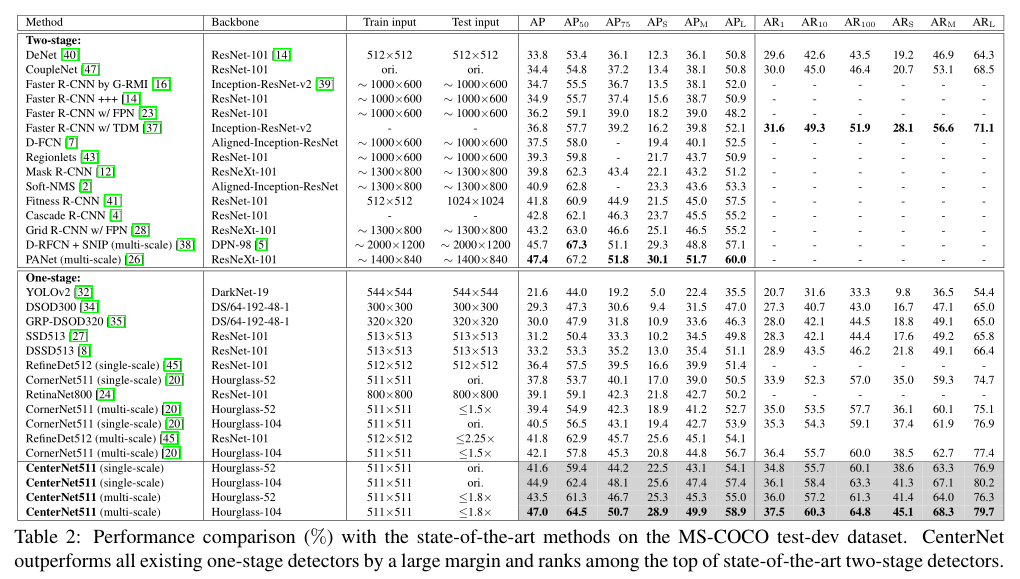
实验结果表明 CenterNet 获得了47%的AP,超过了所有已知的 one-stage 检测方法,并大幅度领先,其领先幅度至少达4.9%。最近目标检测方法在COCO数据集上基本在以百分之零点几的精度往前推进,因为coco数据集难度很高,而CenterNet往前推进了将近5个百分点。同时,CenterNet 的结果也接近two-stage方法的最好结果。值得注意的是,CenterNet 训练输入图片分辨率只有 511X511,在 single-scale下,测试图片的分辨率为原图分辨率(~500),在 multi-scale下,测试图片的分辨率最大为原图分辨率的1.8倍。而two-stage的输入图片的分辨率一般最短边也要>600,甚至更大,比如D-RFCN+SNIP和 PANet。而且本文方法是 Train from scratch。
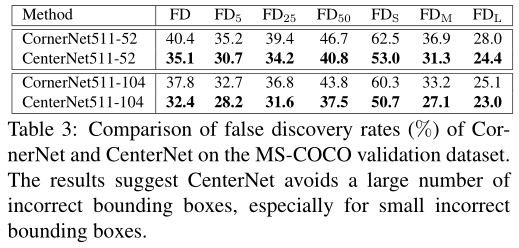
上表Table3为 CenterNet 与 CornerNet 的单独对比,可以看出在coco数据集上CenterNet消除大量误检框,尤其是在小物体上。
速度方面,Two-stage 方法论文中一般是不报的。One-stage方法只在较浅的backbone上如VGG-16上报速度,一般处理一张图片需要十几毫秒,在较深的backbone上速度为慢一些,处理一张图片需要几百毫秒,但还是要比 two-stage 的方法快。本文在一张 Nvidia Tesla P100 显卡上比较了CornerNet和CenterNet,CornerNet511-104 测试速度约为 300ms/帧,而 CenterNet511-104 的测试速度约为340ms/帧,比 baseline 慢约 40ms/帧。但对于更轻backbone,CenterNet511-52的测试速度约为270ms/帧,比CornerNet511-104快约30ms/帧,而且其精度无论是single-scale test 还是 multi-scale test 都比CornerNet511-104高。
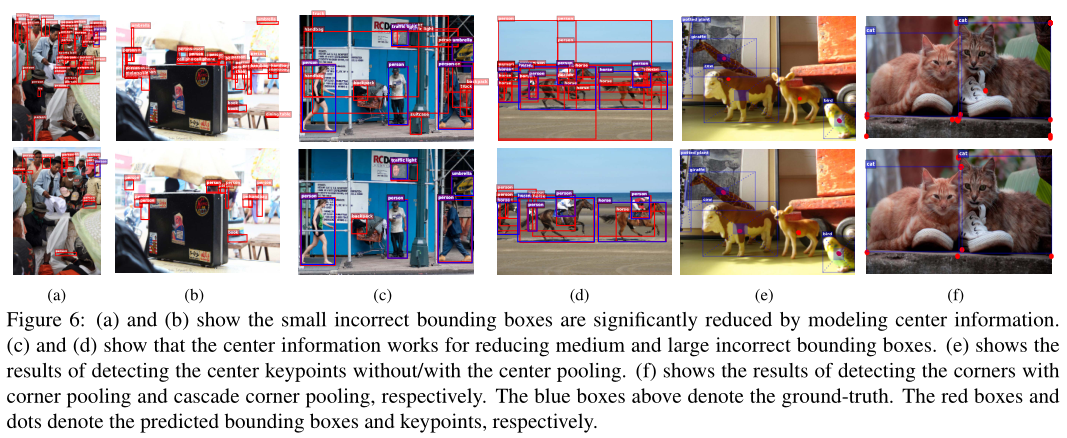
上图figure6表明CenterNet 与 CornerNet 的对比结果。(a) 和 (b) 表明 CenterNet 能有效去除小尺度的错误目标框。(c) 和 (d) 表明 CenterNet 能有效去除中等尺度和大尺度的错误目标框。(e)是否采用center pooling检测中心点。(f)对比分别使用corner pooling和cascade corner pooling检测角点。

上图figure7表明, CenterNet 去除了大量错误的目标框,因此即使在目标框的 confidence 较低的情况下,依然能保证较好的检测结果,上图展示了 confidence 在0.5以上的目标框分布情况。
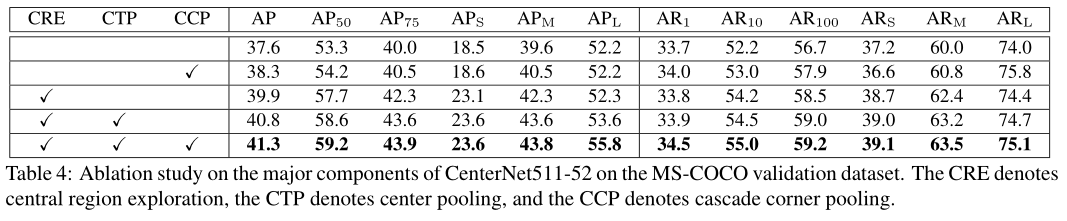
上表Table4 为消融实验。第一行为CornerNet结果。中心点的加入 (CRE) 使得网络提升了2.3% (37.6% vs 39.9%)。对于中心点的检测,本实验使用传统的卷积操作进行。其中小尺度目标提升的最多,提升了4.6% (18.5% vs 23.1%),而大尺度目标几乎没有发生变化。这说明小尺度的错误目标框被去除的最多,这是因为从概率上讲,小尺度目标框由于面积小更容易确定其中心点,因此那些错误的小目标框不在中心点附近的概率更大,因此去除的最多。Center pooling (CTP) 的加入使网络进一步提升了0.9%。值得注意的是,大尺度目标提升了1.4% (52.2% vs 53.6%),小目标和中等目标也得到了一定的提升,这表明 center pooling 能够使中心点获得更易于区分于其他类别的语义信息。Cascade corner pooling (CCP) 使得使网络性能进一步提升。第二行的试验中,我们将 CornerNet 的corner pooling 替换成了 cascade corner pooling,性能提升了0.7% (37.6% vs 38.3%)。可以观察到大目标的 AP 没有发生变化,AR 却提升了1.8% (74.0% vs 75.8%), 这说明 cascade corner pooling 通过加入了物体内部信息能够感知更多的物体,但是由于大目标由于面积过大,使其容易获得较明显的内部特征而干扰了边缘特征,因此使得预测出的目标框位置不精确。当结合了 CRE 后,由于 CRE 能够有效去除错误目标框,因此使大目标框的AP得到了提升 (53.6% vs 55.8%).

上表Table5 为错误实验分析。将检测的中心点用真实的中心点代替,实验结果表明中心点的检测准确度还有很大的提升空间。同时该结果还表明要想更进一步的提升检测精度,需要进一步提升中心点的检测精度。
总结
这篇CenterNet使用关键点三元组(左上,右下,中心点)来确定一个目标,与CornerNet相比增加一个中心点来消除误检框,故事点在于“网络具备感知物体内部信息的能力”,并在最后作者认为可以移植到其余anchor或anchor-free的检测器上,博主比较同意作者所提观点,比如目前潮流的attention机制就是增强物体之间的relation或者增强物体内部语义信息。与此相比,原CornerNet团队提出的CornerNet-Lite中的CornerNet-Saccade将原任务分为两个阶段,第一阶段粗检利用attention maps找到可能存在目标的中心点,第二阶段精检crop区域的所有目标,此两阶段方法与本文思想类似,都是通过加入中心点这一限定增强检测器性能。