1、PCL中有哪些可用的PointT类型
这些point类型都位于point_types.hpp文件中,如果用户需要自己定义类型,需要对已有类型了解。
1)PointXYZ---成员变量:float x,y,z;
它是最常用的一个点数据类型,只包含三维XYZ坐标信息,这三个浮点数附加上一个浮点数来满足存储对齐,可利用points[i].data[0]或者points[i].x访问点的x坐标值。

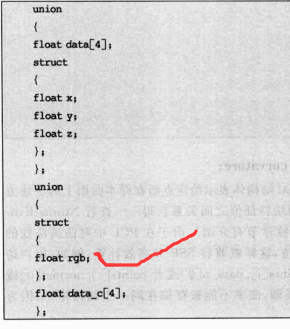
2)、PointXYZI---成员变量:float x,y,z,intensity;
由于对于该类型的点point大部分操作都会把data[4]元素设置成0或1(用于变换),不能让intensity与XYZ在同一结构体中,如果这样intensity的内容会被覆盖。例如两个点的点积操作,则会把data[4]设置为0。为了兼容存储对齐用3个额外的浮点数来填补intensity,虽然在存储效率上降低,但是运行效率提高了。如下
3)PointXYZRGBA---成员变量:float x,y,z;uint32_t rgba;
除了RGBA信息被包含在一个整型变量中,其他的和PointXYZI类似。
4)PointXYZRGB---float x,y,z,rgb;
这里的rgb是用一个浮点型来存储的,源于早期PCL属于ROS项目。
5)PointXY---float x,y;
简单的二维点,
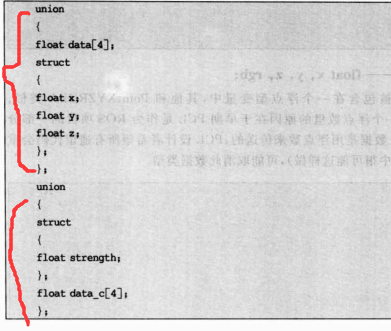
6)InterestPoint---float x,y,z,strength;
strength表示关键点的强度的测量值,其他的和PointXYZI类似。
7)Normal---float normal[3],curvature;
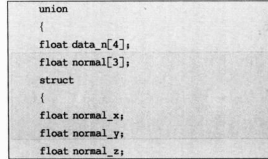
8)PointNormal---float x,y,z;float normal[3],curvature;
PointNormal是存储XYZ数据的point结构体,并且包括采样点对应法线和曲率。

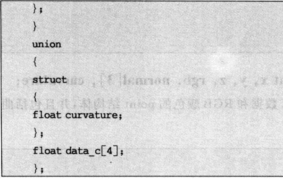
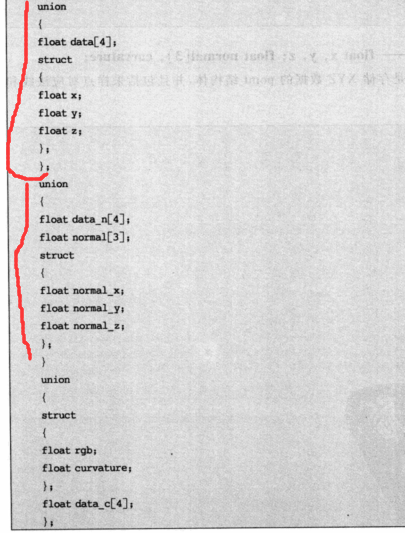
9)PointXYZRGBNormal---float x,y,z,rgb,normal[3],curvature;
PointXYZRGBNormal存储XYZ数据和RGB颜色的point结构体,并且包含曲面法线和曲率
10)PointXYZINormal---float x,y,z,intensity,normal[3],curvature;
其存储XYZ数据和强度值的point结构体,并且包括曲面法线和曲率。

11)PointWithRange---float x,y,z(union with float point[4]),range;
其除了range包含从所获得的视点到采样点的距离测量值之外,其他与PointXYZI类似。


12)PointWithViewpoint---float x,y,z,vp_x,vp_y,vp_z;
其中vp_x、vp_y和vp_z以三维点表示所获得的视点,其余与PointXYZI一致
13、MomentInvariants---float j1,j2,j3;
14、PrincipalRadiiRSD----float r_min,r_max;

15、Boundary---uint8_t boundary_point;

16、PrincipalCurvatures---float principal_curvature[3],pc1,pc2;

17、PFHSignature125---float pfh[125];
18、FPFHSignature33---float fpfh[33];
19、VFHSignature308---float vfh[308]

20)Narf36---float x,y,z,roll,pitch,yaw;float descriptor[36];

21)BorderDescription---int x,y;BorderTraits traits;
22)IntensityGradient---float gradient[3];
23)Histogram---float histogram[N];
24、PointWithScale---float x,y,z,scale;


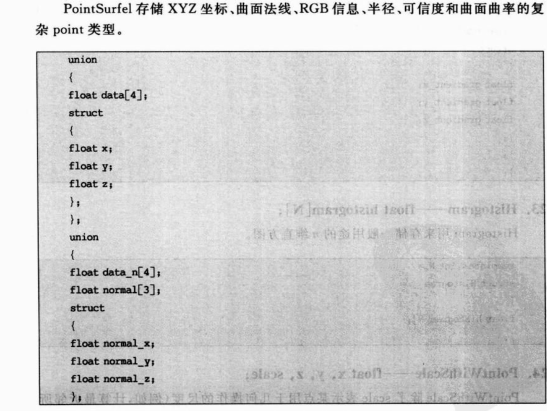
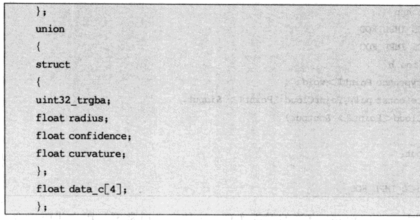
25)PointSurfel---float x,y,z,normal[3],rgba,radius,confidence,curvature;
2、如何在模板类中使用这些point类型
为了使包含和链接到PCL库的用户代码编译速度提高,我们使用显示的模板实例化,最终编译链接的库包括了所有可能的模板实例---在这些组合中使PCL中已经定义的point类型所有的模板类都能够直接调用,不需要重新编译,这意味着一旦PCL编译成库,任何用户代码都不需要编译模板化代码,这样就加速了用户编译过程。这个是通过在头文件中首先声明了我们的类和方法,再在模板类实现头文件中进行实现,配置在原文家中进行显示的实例化,最后在编译链接时分别实例化。例如:

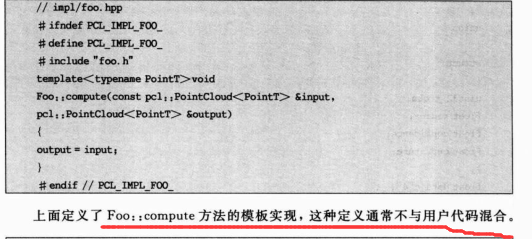


3、如何增加新的PointT类型