1、launch
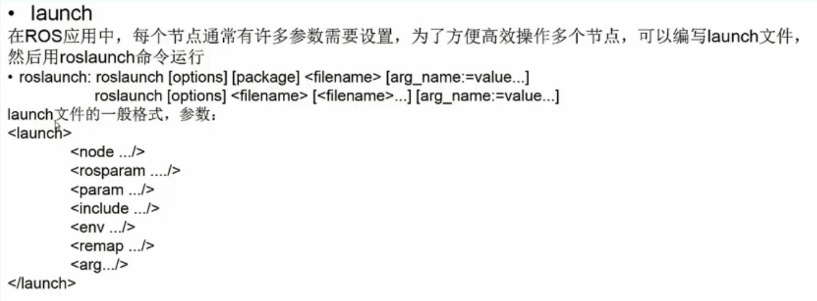
参数说明:

pkg为节点的功能包,type为需要运行的那个节点,name为节点的名字,后面的参数可选
举个launch文件的例子:
在工作空间中新建一个包:

然后再回到工作空间中去编译:

再在包目录下创建一个launch文件:


把type=turtlesim_teleop_key改成type=turtle_teleop_key,在这里的type与name是不一样的。

rosparam与param的区别
rosparam可操作多个参数,以及yaml文件参数,param一次性只能指定一个参数,且是标准类型的参数。
下面创建一个文件yaml:
命名为color.yaml文件,
在里面输入
background_r:0
background_g:0
background_b:0

然后再对launch文件进行编辑:

<param>,如
在里面的name为参数名,对应的value是参数值。
再在launch文件中添加

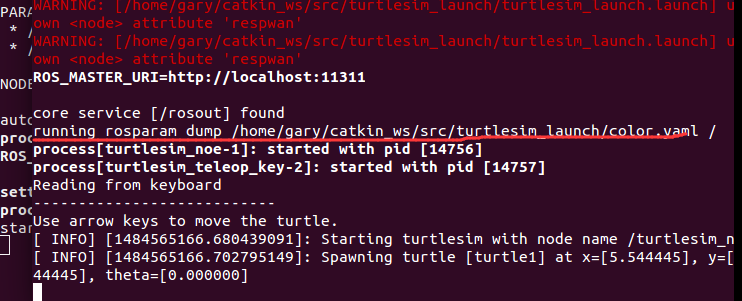
运行:

当然也可以写到node里面去,那么就是node为turtle_teleop_key内部的参数,如下划线部分所示。

运行结果
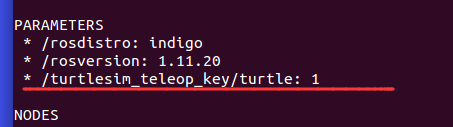

如下:

再写一个teleop.launch文件

运行成功!
remap将一个参数名映射为另一个参数名
用处举例:假设有个节点要接受一个chatter的话题的数据,有另外一个hello的话题跟chatter的数据类型一致,那么可以使用remap的from和to来重映射。
<arg>定义一个局部参数,且该参数只能在一个launch文件中使用
参数举例:

运行

在这里对该参数foo赋值foo:=2赋值了。
如果取一个常量值


如果该参数使用赋值变量value,那么不能对其进行修改。