IPC
一、进程(线程)之间的通信(Internal Process Communication, IPC)
在嵌入式系统中运行的代码主要包括线程和ISR,在他们的运行过程中,他们的运行步骤有时需要同步(按照预定的先后次序运行),他们访问的资源有时需要互斥(一个时刻只允许一个线程访问资源),他们之间有时也要彼此交换数据。这些需求,有的是因为应用需求,有的是多线程编程模型带来的需求。
操作系统必须提供相应的机制来完成这些功能,我们把这些机制统称为进(线)程间通信(IPC),RT-Thread中的IPC机制包括信号量、互斥量、事件、邮箱、消息队列五种。
通过IPC机制,我们可以协调多个线程(包括ISR)默契的工作,从而共同完成一个整项工作。
二、信号量工作机制
信号量是一种轻型的用于解决线程件同步问题的内核对象,线程可以获取或者释放它,从而达到同步或互斥的目的。

信号量的工作机制如上图所示,每个信号量对象都有一个信号量值和一个线程等待队列,信号量的值对应信号量对象的实例数目(该信号量表示的资源的数目),假如信号量的value值是5,表示还有5个信号量实例(资源)可以被申请使用,当该value==0时,再申请该信号量的线程就会被挂起再该信号量的等待队列上,等待可用的信号量实例。
三、信号量控制块
用于管理和映射一个信号量对象的数据结构
struct rt_semaphore
{
struct rt_ipc_object parent; /**< inherit from ipc_object */
rt_uint16_t value; /**< value of semaphore. */
};
typedef struct rt_semaphore *rt_sem_t;//信号量控制块指针
定义静态信号量:struct rt_semaphore static_sem;
定义动态信号量: rt_sem_t dynamic_sem;//定义一个信号量控制块指针,之后可以通过动态创建的方法创建一个信号量控制块,并将信号量控制块指针返回赋值给该指针。
四、信号量操作API函数
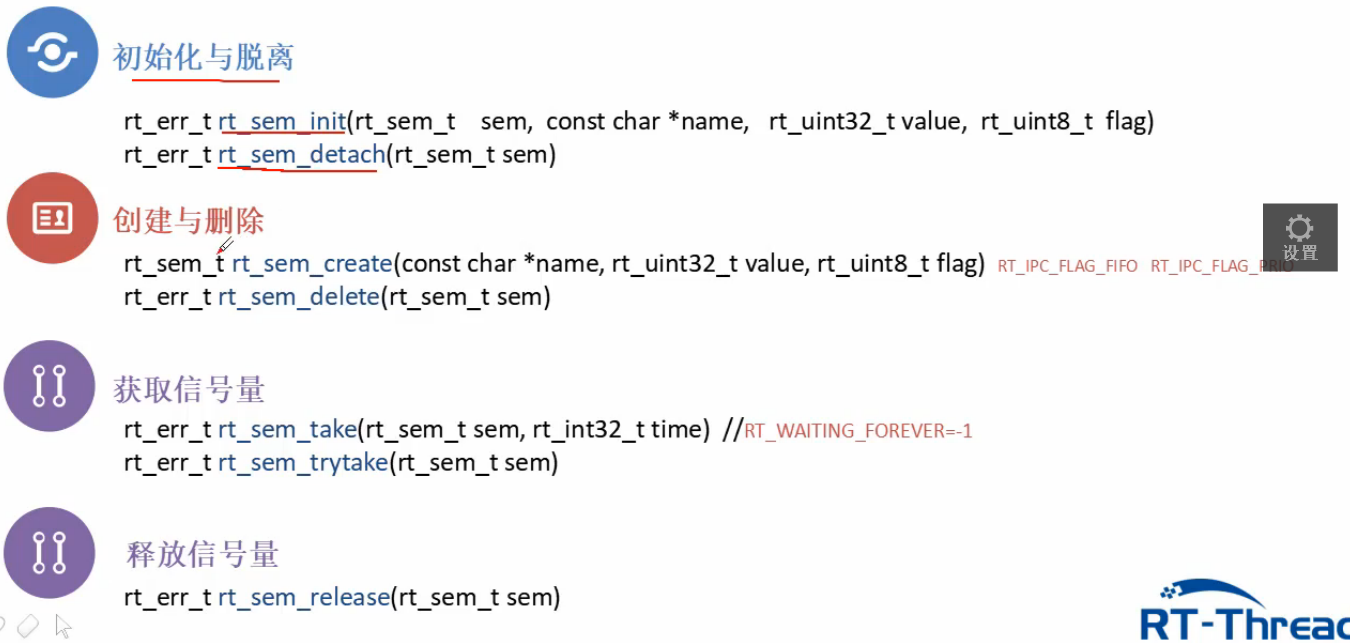
RT-Thread中,关于信号量操作的API函数如下
#ifdef RT_USING_SEMAPHORE /* * semaphore interface */ rt_err_t rt_sem_init(rt_sem_t sem, const char *name, rt_uint32_t value, rt_uint8_t flag); rt_err_t rt_sem_detach(rt_sem_t sem); rt_sem_t rt_sem_create(const char *name, rt_uint32_t value, rt_uint8_t flag); rt_err_t rt_sem_delete(rt_sem_t sem); rt_err_t rt_sem_take(rt_sem_t sem, rt_int32_t time); rt_err_t rt_sem_trytake(rt_sem_t sem); rt_err_t rt_sem_release(rt_sem_t sem); rt_err_t rt_sem_control(rt_sem_t sem, int cmd, void *arg); #endif
1.初始化与脱离(静态初始化一个已经静态定义的一个信号量对象)
rt_err_t rt_sem_init(rt_sem_t sem,//之前定义好的信号量控制块 const char *name,//名字 rt_uint32_t value,//信号量value初始化值 rt_uint8_t flag);//获取信号量的线程等待队列的排队顺序。
//RT_IPC_FLAG_FIF0,先进先出;RT_IPC_FLAG_PRIO,根据优先级
rt_err_t rt_sem_detach(rt_sem_t sem);//将信号量对象从内核管理对象中脱离
2.创建与删除(动态的方法创建一个信号量,并返回信号量控制块指针;将信号量从内核管理对象中删除 )
rt_sem_t rt_sem_create(const char *name, rt_uint32_t value, rt_uint8_t flag);
rt_err_t rt_sem_delete(rt_sem_t sem);
3.获取信号量(用于线程或者ISR中,申请一个信号量,并获取对应资源,并将信号量value值减1,当value值为0时,线程会挂起进入线程等待队列)
rt_err_t rt_sem_take(rt_sem_t sem, rt_int32_t time);//time表示时间等待参数,time*10ms,RT_WAITTING_FORVER=-1 rt_err_t rt_sem_trytake(rt_sem_t sem);
4.释放信号量(用于线程或者ISR中,释放一个信号量,并释放对应资源,并将信号量value值加1)
rt_err_t rt_sem_release(rt_sem_t sem);
五、应用实例代码
1 /* 2 * 程序清单:信号量例程 3 * 4 * 该例程创建了一个动态信号量,初始化两个线程,线程1在count每计数10次时, 5 * 发送一个信号量,线程2在接收信号量后,对number进行加1操作 6 */ 7 #include <rtthread.h> 8 9 #define THREAD_PRIORITY 25 10 #define THREAD_TIMESLICE 5 11 12 /* 指向信号量的指针 */ 13 static rt_sem_t dynamic_sem = RT_NULL; 14 15 ALIGN(RT_ALIGN_SIZE) 16 static char thread1_stack[1024]; 17 static struct rt_thread thread1; 18 static void rt_thread1_entry(void *parameter) 19 { 20 static rt_uint8_t count = 0; 21 22 while(1) 23 { 24 if(count <= 100) 25 { 26 count++; 27 } 28 else 29 return; 30 31 /* count每计数10次,就释放一次信号量 */ 32 if(0 == (count % 10)) 33 { 34 rt_kprintf("t1 release a dynamic semaphore. " ); 35 rt_sem_release(dynamic_sem); 36 } 37 } 38 } 39 40 ALIGN(RT_ALIGN_SIZE) 41 static char thread2_stack[1024]; 42 static struct rt_thread thread2; 43 static void rt_thread2_entry(void *parameter) 44 { 45 static rt_err_t result; 46 static rt_uint8_t number = 0; 47 while(1) 48 { 49 /* 永久方式等待信号量,获取到信号量,则执行number自加的操作 */ 50 result = rt_sem_take(dynamic_sem, RT_WAITING_FOREVER); 51 if (result != RT_EOK) 52 { 53 rt_kprintf("t2 take a dynamic semaphore, failed. "); 54 rt_sem_delete(dynamic_sem); 55 return; 56 } 57 else 58 { 59 number++; 60 rt_kprintf("t2 take a dynamic semaphore. number = %d " ,number); 61 } 62 } 63 } 64 65 /* 信号量示例的初始化 */ 66 int semaphore_sample() 67 { 68 /* 创建一个动态信号量,初始值是0 */ 69 dynamic_sem = rt_sem_create("dsem", 0, RT_IPC_FLAG_FIFO); 70 if (dynamic_sem == RT_NULL) 71 { 72 rt_kprintf("create dynamic semaphore failed. "); 73 return -1; 74 } 75 else 76 { 77 rt_kprintf("create done. dynamic semaphore value = 0. "); 78 } 79 80 rt_thread_init(&thread1, 81 "thread1", 82 rt_thread1_entry, 83 RT_NULL, 84 &thread1_stack[0], 85 sizeof(thread1_stack), 86 THREAD_PRIORITY, THREAD_TIMESLICE); 87 rt_thread_startup(&thread1); 88 89 rt_thread_init(&thread2, 90 "thread2", 91 rt_thread2_entry, 92 RT_NULL, 93 &thread2_stack[0], 94 sizeof(thread2_stack), 95 THREAD_PRIORITY-1, THREAD_TIMESLICE); 96 rt_thread_startup(&thread2); 97 98 return 0; 99 } 100 /* 导出到 msh 命令列表中 */ 101 MSH_CMD_EXPORT(semaphore_sample, semaphore sample);