1: Situation
这是我参加18年参加的一个比赛,当时我们的组别是“电磁三轮组”,电磁组就是在赛道中心线上铺设电磁引导线,其中通有20kHz、100mA的交变电流。总的来说可以分为三个部分。
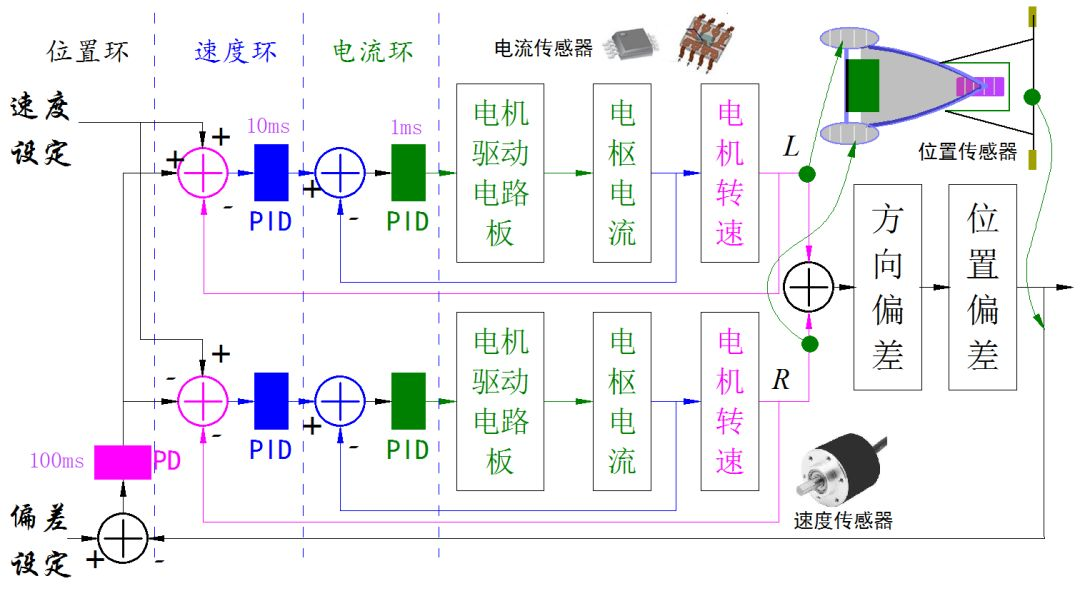
车模采集电磁信号,主控系统处理,电机速度控制。硬件方案如下:
。主控芯片我们采用的是恩智浦KEA128
。运放采用的性能比较好的两路OPA2350轨到轨运放,用的是五个电感。
。电机驱动部分是由IR2184驱动由四个MOSFET组成的H桥全桥电路来控制两个电机
。电源部分稳压部分用的是TPS7350,升压部分用的是MC34063
。另外还加入mpu6050进行辅助检测
2:Target
在最短的时间内完成各种赛道元素。(直道,弯道,环岛等)
3:Action
电源:常用的稳压电源有串联型线性稳压电源(LM2940、TPS系列、7805等)和 开关型稳压电源(LM2596、LM2575、AS1015等)两大类。前者具有纹波小、电路结构简单的优点,但是效率较低,跟压差成反比,功耗大;后者功耗小,效率高, 电流大,但电路却比较复杂,电路的纹波大。我们选取的是TPS7350分开供电的,可以减小电源噪声的干扰。
之所以引入DC-DC升压部分主要是因为电池电压7.2V,而电机驱动芯片IR2184需要10到20V的一个工作电压。
电磁传感器:使用电感作为检测导线的传感器,但是其感应信号较微弱,且混有杂波,所以要进行信号处理。要进行以下三个步骤才能得到较为理想的信号:信号的滤波,信号的放大,信号的检波。
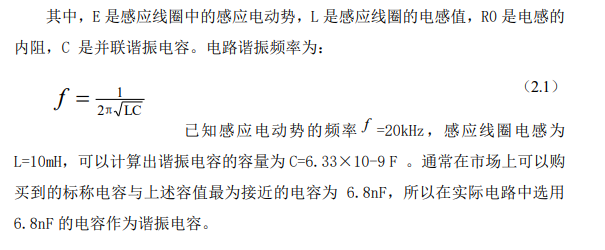
比赛选择 20kHz 的交变磁场作为路径导航信号,为了在频谱上可以有效地避开周围其它磁场的干扰,因此信号放大需要进行选频放大,使得 20kHz 的信号能 够有效的放大,并且去除其它干扰信号的影响。使用 LC 并联谐振电路来实现选频电路(带通电路),如图所示。

由第一步处理后的电压波形已经是较为规整的 20kHz 正弦波,但是幅值较小, 随着距离衰减很快,不利于电压采样,所以要进行放大.
放大电路
同相比例运算电路

反相比例运算电路

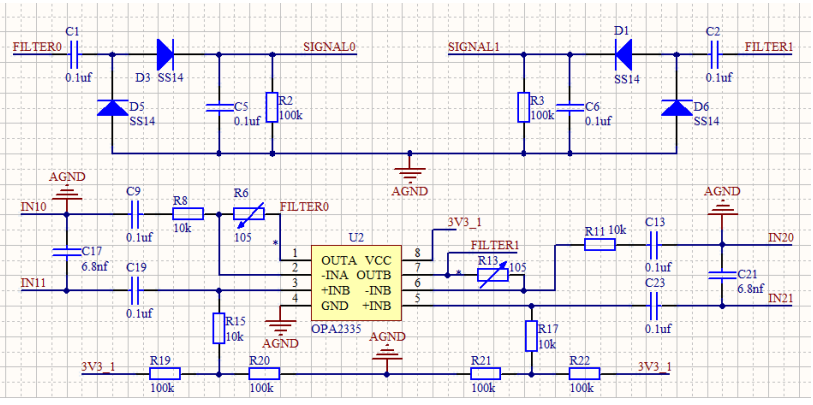
检波
测量放大后的感应电动势的幅值 E 可以有多种方法。最简单的方法就是使用二极管检波电路将交变的电压信号检波形成直流信号,然后再通过单片机的 AD 采集获得正比于感应电压幅值的数值。
电感方案
--- --- / ---
左右两个电感用于在水平赛道上, /两个电感用在检测侧环方向上,中间水平电感用于检测环以及坡道。
MPU的加入
形成转向闭环??逐飞科技有提到过,但是我们没用。
电机驱动:
MOSFET使用与H桥驱动问题
Mosfet的选择
选择 MOSFET 时主要考虑的因素有:耐压、导通内阻和封装。智能车电源是额定电压为 7.2V 的电池组,由于电机工作时可能处于再生发 电状态,所以驱动部分的元件耐压值最好取两倍电源电压值以上,即耐压 在 16V 以上。而导通内阻则越小越好。封装越大功率越大,即同样导通电阻下通过电流更大,但封装越大栅极电荷越大,会影响导通速度。TO-252 封装功率较大、而栅极电荷较小。于是我们最终选择了 IR 公司 TO-252 封装的 LR7843 型 N 沟道 MOSFET,VDSS (漏级源级最大电压)= 55 伏、RDS(on)(导通电阻) = 8.0 毫欧、ID(最大电流)= 110 安。
低端电流检测
软件方案:
(我是主要搞硬件的,软件的东西仅仅是我门讨论的一些方案和我在论坛上看到的感觉可行的方案)
电磁信号处理:归一化算法=(采集值-最小值)/(最大值-最小值),最大最小值为比赛之前测量
这样的处理算法,其本质其实就是在每次车跑之前,重新快速校准偏差和电感值的对应关系。
通过归一化处理,能保证电磁车有更强的适应性,适应更宽的赛道电源电流参数,而路径将不容易受电源的不同而影响。
归一化步骤
将 AD值做归一化处理,即根据各个传感器接收赛道的最高电压和最低电压,计算出各个传感器的相对值,偏差为0时,为黑线位置。
我们软件是先计算每个电感的归一化后的值,然后再与左右两个电感归一化后的值和相比。。。有点不明白。
PID方案:
摘自卓大大公众号。我感觉这样控制肯定稳。
速度控制方案还有这个链接。我看学长的程序好像就是这样的。
https://ishare.iask.sina.com.cn/f/iGaFMv3Jfs.html