
论文原址:https://arxiv.org/abs/1904.03797
摘要
FoveaBox属于anchor-free的目标检测网络,FoveaBox直接学习可能存在的图片种可能存在的目标,这期间并不需要anchor作为参考。主要靠两方面实现:(1)产生类别敏感的语义map用于表示目标物存在的可能性。(2)在每个可能存在目标物的位置生成与类别无关的边界框。目标边框的尺寸与对应输入图片的特征金字塔的表示相关。
介绍
目标检测主要包含两个任务:定位及识别,输入一张图片,检测系统需要判断是否有预定义类别的目标物,如果有,就返回他的空间位置以及内容。为了增加系统的定位功能,滑动窗已经沿用了很多年。基于anchor的方法一般趋向框的空间(包括尺寸,大小,位置等)划分为格子,并增强对应目标的格子来进行定位。对于双阶段检测来说,Anchors是回归标准,以及用于预测proposals的候选框。对于单阶段检测来说是最终的边框。Anchor也可以看作是覆盖所有可能存在目标物的像素的特征共享的滑动窗机制。
anchor存在以下几点缺点:(I)anchor引入了大量的超参数。为了得到一个较好的召回率,需要参考由数据集/测试集计算得到的统计分布设置。(II)对于一个数据集设计的anchor可能不适用于另一个数据集,普适性低。(III)anchor一般会产生较多的候选框,而这里就存在着前景/背景数目不平衡问题。
提高anchor普适性的一个做法是改变anchor,使其灵活可变。借鉴人类的视觉系统,人文可以直接通过视觉信息识别出物体的位置及类别,而不需要一些繁琐的预定义的框。本文的FoveaBox的灵感来自人样的Fovea。视野(目标物)中心具有最高的视觉敏感度。FoveaBox预测可能存在目标物中心位置的同时预测有效位置的边框。由于特征金字塔表示,可以通过在不同层次的特征上检测出不同尺寸大小的目标物。由于FoveaBox不依赖于预定义的anchor,因此,对于数据集的边框分布更具鲁棒性。
FoveaBox
FoveaBox是一个网络,由backbone及两个任务明确的子网络组成。backbone负责得到整幅图像的卷积特征。第一个分支网络在backbone的输出特征上进行像素级分类。第二个分支用于边界框的预测。
FPN for backbone
FPN通过利用top-down结构及侧连接结构来构建单尺寸输入的多尺寸金字塔特征。金字塔的每一层都可以检测不同尺寸大小的目标。本文搭建了![]() 金字塔,l代表金字塔的某一层级,每层的输出通道数都为256
金字塔,l代表金字塔的某一层级,每层的输出通道数都为256
Scale Assignment
由于不同物体存在较大的尺寸变化,预测得到的边框的值不是固定的。相对的,本文特征金字塔的层级,将目标物的尺寸划分为几个格子。P3到P7,每层都有自己对应的基础区域32^2~512^2,对于Pl层种的basic-area大小Sl如下
![]()
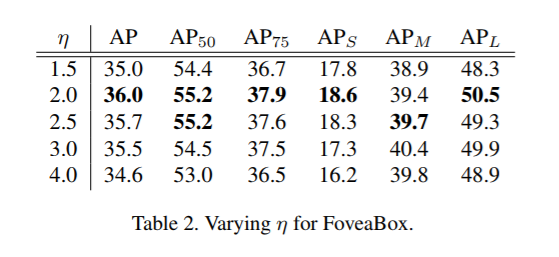
参考基于Resnet Faster R-CNN中用C4作为signel scale,本文将S0设置为16,特征金字塔中每层只学习目标物的一部分特征表示。对于l层的特征金字塔其目标物尺寸的有效范围如下,其中下式中的eta人为设置的用于控制每层的尺寸范围。不在范围内的目标在训练时被忽略,值得注意的是同一个目标可能会在不同的层中检测到。
![]()
Object Fovea
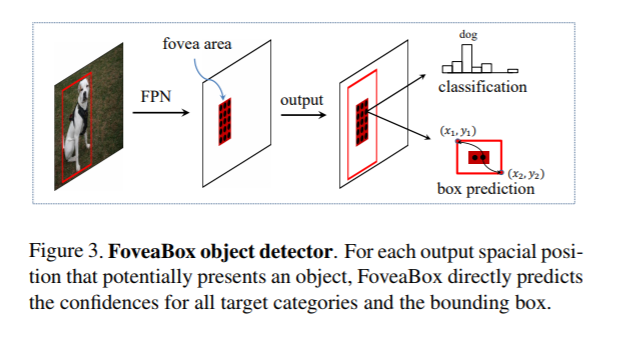
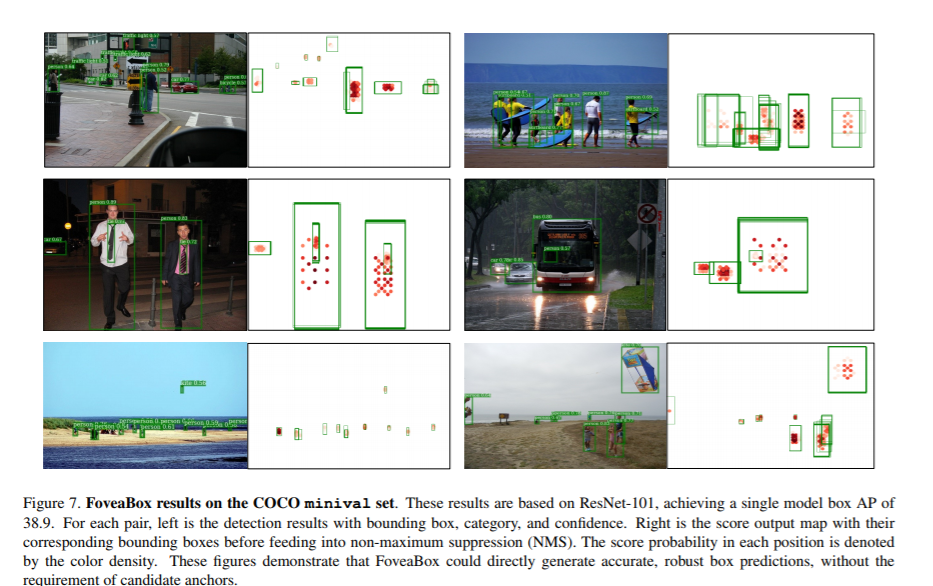
每个金字塔heatmaps的输出为K(类别数)通道,大小为HxW,如下图所示,每个通道都是一个二值mask表示是否为某一个类别。

给定一个ground truth框(x1,y1,x2,y2),首先基于stride 2^l将其映射至对应的l层。
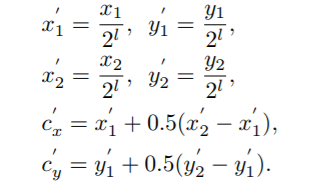
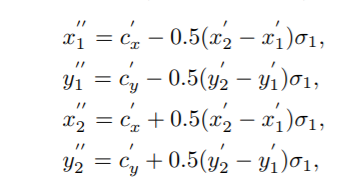
位于score map上的positive 区域![]() 相比原来做了一些缩放处理,如下图3所示,等式如下,
相比原来做了一些缩放处理,如下图3所示,等式如下,![]() 为缩放因子。落入该区域的ceil标记对应类别。通过引入另一个缩放因子
为缩放因子。落入该区域的ceil标记对应类别。通过引入另一个缩放因子![]() 按等式(4)得到
按等式(4)得到![]() ,negative区域为除去Rneg的整个feature map。如果一个单元没有被assign,在训练时,则将其忽略。由于positive区域占较小的比例,因此,该分支使用Focal Loss。
,negative区域为除去Rneg的整个feature map。如果一个单元没有被assign,在训练时,则将其忽略。由于positive区域占较小的比例,因此,该分支使用Focal Loss。
预测边框
模型只编码目标物体存在的概率。为了定位,需要预测每个实例可能存在的位置。每个ground truth box的位置按如下方式定义。
G=(x1,y1,x2,y2),本文目标:找到一种变换将feature maps中(x,y)单元的网络位置输出![]() 映射到ground truth box G中,
映射到ground truth box G中,
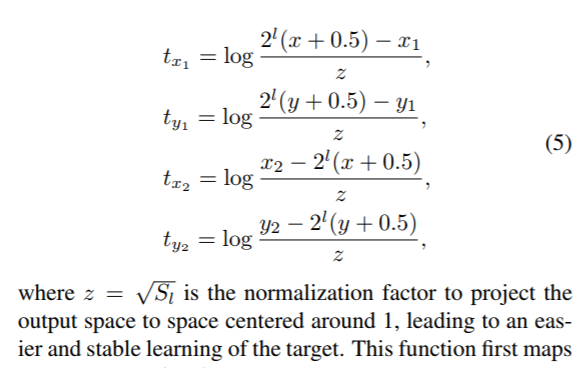
上面函数首先将位置(x,y)映射至输入图片,然后计算映射后的坐标于G之间的偏差。最后通过Log-space进行处理。仍基于L1 loss对Lbox进行训练。最后,在输出feature maps上的每个positive ceil(x,y)上产生框的边界。
优化策略
Inference
首先设置0.05滤掉confidence低于此值的预测结果,每个预测层中选测分数前100的结果。对于每个类别使用基于0.5的阈值进行NMS处理。最终每张图片得到100个预测结果。
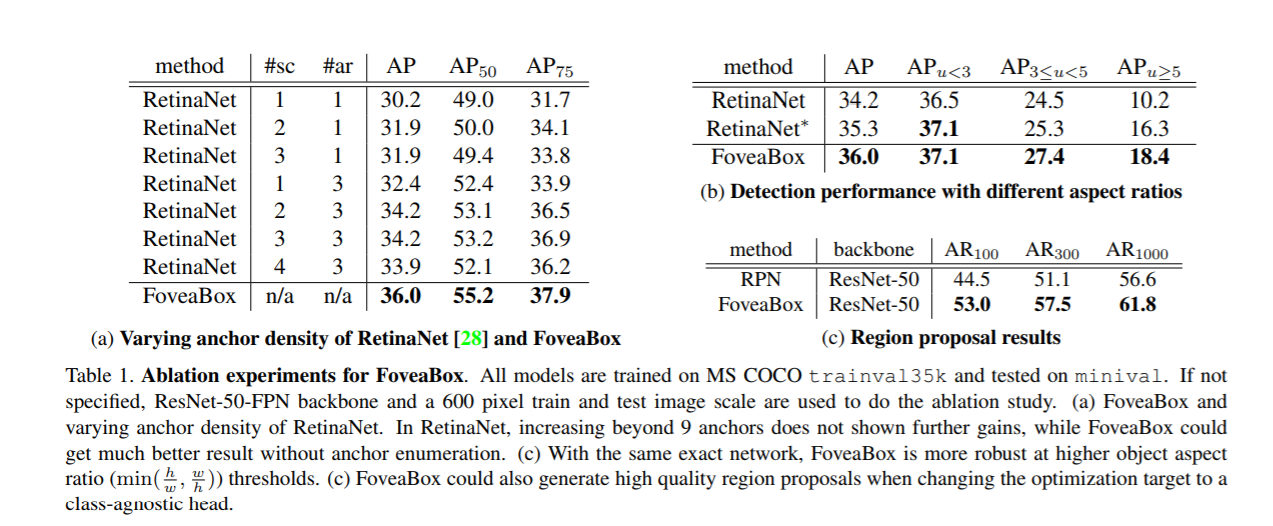
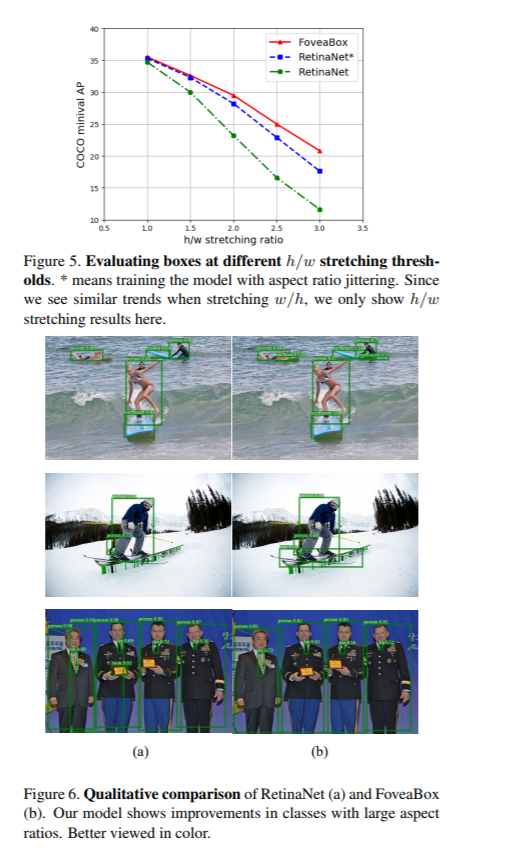
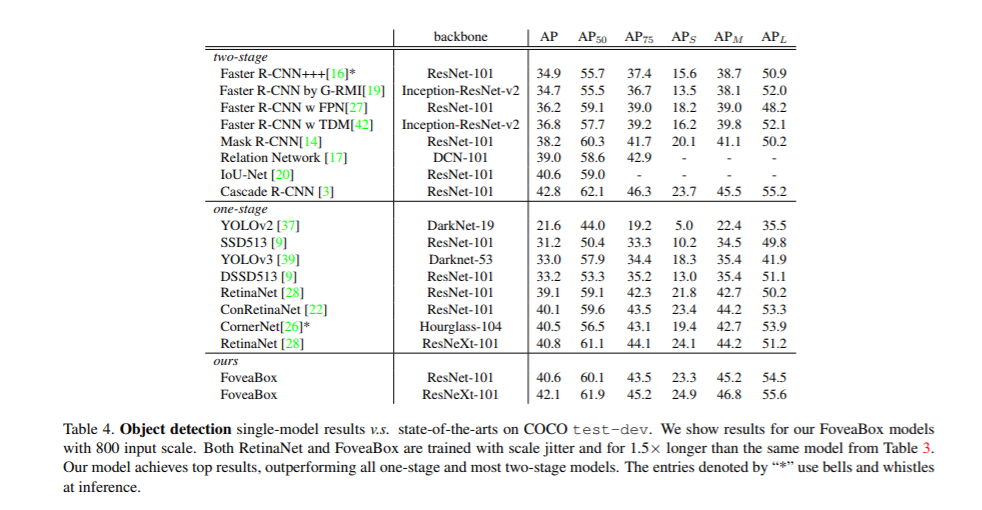
实验


Reference
[1] M. F. Bear, B. W. Connors, and M. A. Paradiso. Neuroscience, volume 2. Lippincott Williams & Wilkins, 2007.
[2] N. Bodla, B. Singh, R. Chellappa, and L. S. Davis. Softnms–improving object detection with one line of code. In Proceedings of the IEEE International Conference on Computer Vision, pages 5561–5569, 2017.
[3] Z. Cai and N. Vasconcelos. Cascade r-cnn: Delving into high quality object detection. arXiv preprint arXiv:1712.00726, 2017.
[4] H.-Y. Chen et al. Tensorflow–a system for large-scale machine learning. In OSDI, volume 16, pages 265–283, 2016