博客转载自:https://blog.csdn.net/xmy306538517/article/details/78772066
ROS局部路径导航包括Trajectory Rollout 和 Dynamic Window Approach (DWA)两种方法,理论上来说分别对应base_local_planner和dwa_local_planner两个包,但其实dwa的大部分代码都放在了base_local_planner包里面。
框架
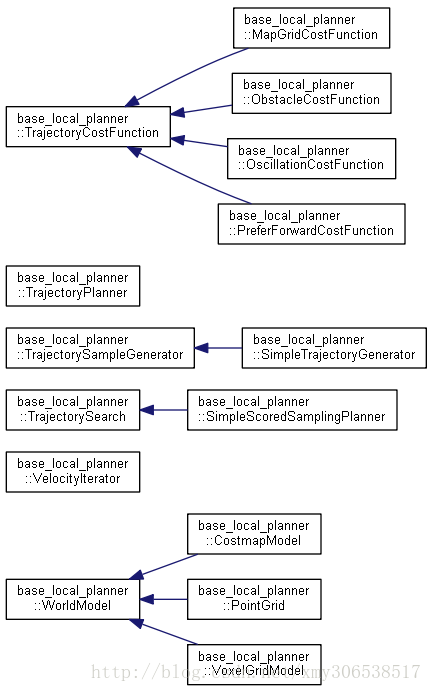
以上接口是局部规划的核心,简单来说:
- TrajectorySampleGenerator产生一系列轨迹
- 然后TrajectoryCostFunction遍历轨迹打分
- TrajectorySearch找到最好的轨迹拿来给小车导航
- 由于小车不是一个质点,worldModel会检查小车有没有碰到障碍物

流程
1.初始化
包括参数,地图,车身数据,比例系数
2.更新局部地图和代价
- 将全局路径中第一个离开局部地图的点作为全局目标(或者使用最后一个在局部地图内的点作为全局目标)
- 更新局部地图中每个点的代价,具体是在computeTargetDistance中实现的,实现的方法是用队列实现了一格格膨胀的效果,eg 终点为0,相邻的点cost+1 ,同理路径上的点为0,膨胀+1,注意同一个点取最小值
3.寻找最优路径
-
然后TrajectoryCostFunction遍历轨迹打分
-
每条轨迹遍历代价函数,比例求和
本DWA中主要使用了如下几种评分函数:
- OscillationCostFunction oscillation_costs_ 震荡代价 ;是否震荡
- ObstacleCostFunction obstacle_costs_ 障碍物代价 ; 看看是否撞到障碍
- base_local_planner::MapGridCostFunction path_costs_ 路径代价 ;是否靠近全局路径规划
- base_local_planner::MapGridCostFunction goal_costs_ 目标代价;是不是朝着目标行驶
- base_local_planner::MapGridCostFunction goal_front_costs_ 前向预判的距离针对目标;
-
base_local_planner::MapGridCostFunction alignment_costs_ 前向预判的距离针对路径;
优点可扩展
base_local_planner::PreferForwardCostFunction prefer_forward_costs_ 优先选择前向行驶;