在源环境中启动CLion
需要告知CLion ROS特定的环境变量。通过运行来源工作空间时,将在当前shell中检索这些变量
source ./devel/setup.bash
为CLion提供ROS环境变量的最简单方法是从同一个shell启动IDE。在获取工作空间后,您可以键入同一终端:
为CLion提供ROS环境变量的最简单方法是从同一个shell启动IDE。在获取工作空间后,您可以键入同一终端:
在CLion中打开一个ROS项目
在源环境中启动CLion后,执行以下操作之一以打开ROS项目:
-
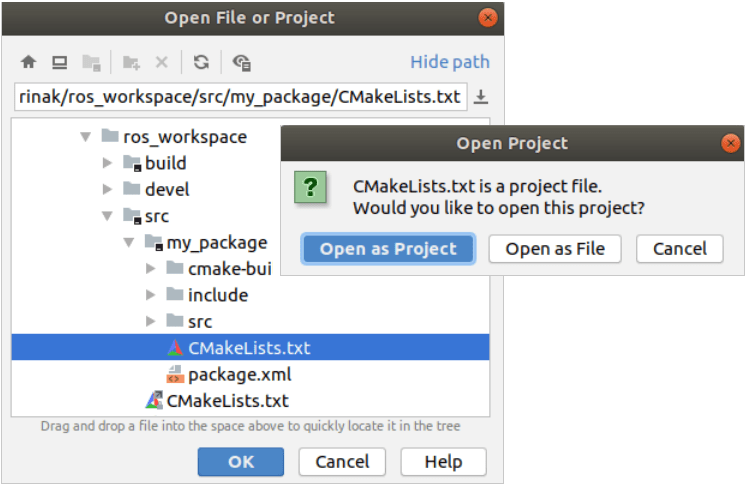
单击文件| 打开并选择ROS工作区的src目录中的CMakeLists.txt,然后选择Open as Project。
-
单击文件| 来自Sources的新CMake项目,并选择工作区的src目录以从中导入项目。
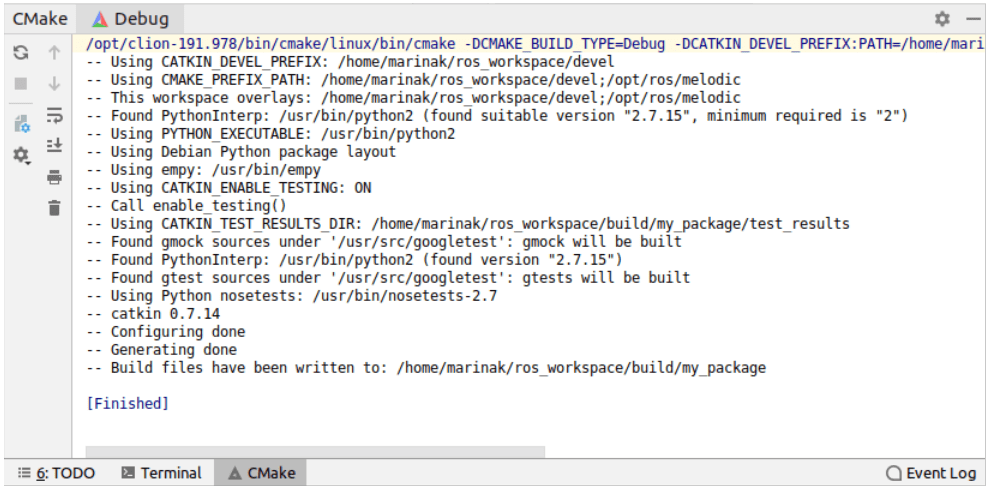
该CMake的工具窗口会显示该项目加载的状态:
设置catkin工作空间的构建路径
默认情况下,CLion将构建输出放在自动创建的cmake-build-debug或cmake-build-release 目录中。对于ROS开发,这意味着您将在CLion和运行的控制台中拥有两个不同的版本catkin_make。
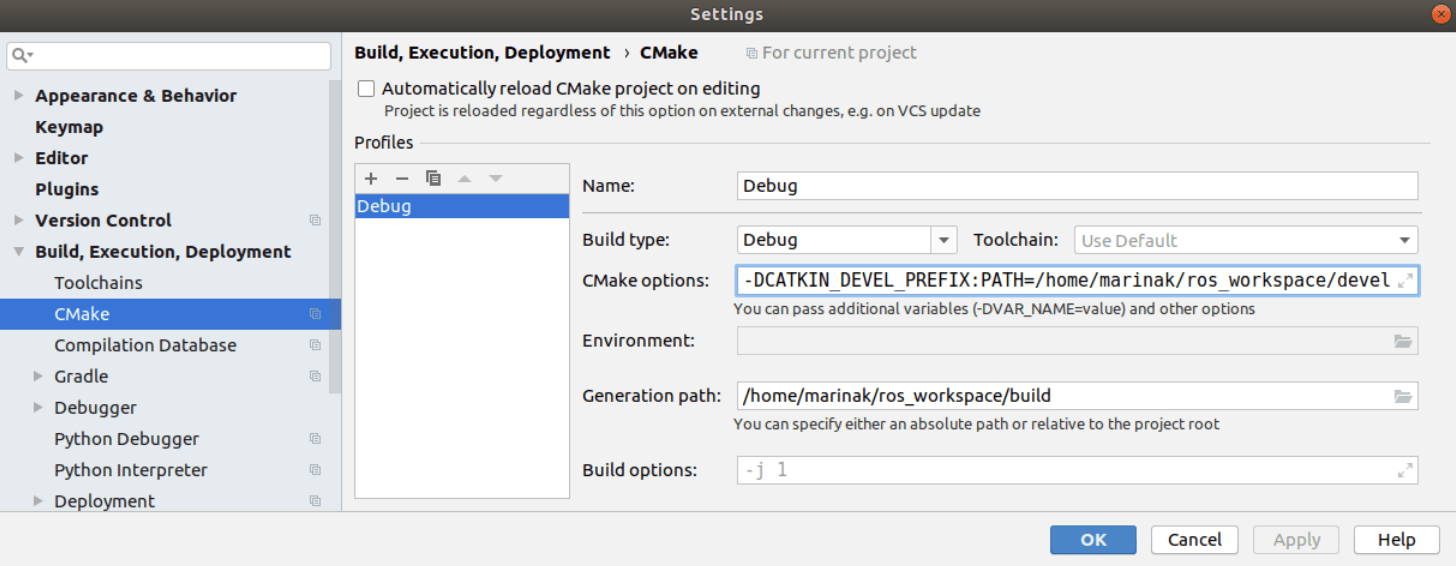
要在IDE和控制台上进行单一构建,需要将CLion构建路径设置为catkin工作区目录。为此,请转到 文件| 设置Ctrl+Alt+S| 构建,执行,部署| CMake并更改两个字段:
-
在生成路径中,设置workspace_folder/build。
-
在CMake选项中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
使用启动文件
您可以在CLion中将ROS节点作为常规应用程序运行和调试。
启动文件无法直接执行,但您可以使用XML语法突出显示和完成编辑它们, 并将调试器附加到正在运行的节点。
将调试器附加到正在运行的节点
1、从命令行 运行.launch文件。例如
roslaunch roscpp_tutorials talker_listener.launch
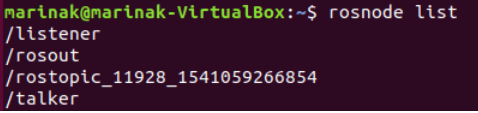
您可以通过该rosnode list命令检查当前运行的节点列表。在我们的示例中,列表将包含talker和listener:
2、呼叫运行| 从主菜单附加到处理或按Ctrl+Alt+F5。
3、通过其PID或名称连接到所需节点:

示例:创建基本ROS节点,在CLion中编辑并运行它
在这个例子中,我们将创建一个简单的ROS包,编辑源代码,并从CLion运行节点。我们将在Ubuntu 18.04上使用ROS Melodic,并在ROS wiki上使用编写简单发布者和订阅者(C ++)教程 的基本发布者节点 。
创建一个基本的ROS包
创建和构建ROS工作区:
mkdir -p ros_workspace/srccd ros_workspace catkin_make
在工作区中,创建一个名为my_package的包:
cd src catkin_create_pkg my_package roscpp rospy std_msgs
启动CLION
来源工作区:
cd ../../../source ./devel/setup.bash
并在同一终端启动CLion
sh /opt/clion-2018.2/bin/clion.sh
在CLion中打开包作为项目
在CLion中,转到File | 打开并选择位于包文件夹内的CMakeLists.txt文件,然后选择将其作为项目打开:
添加源文件并编辑CMakeLists.txt
向项目添加新的源文件:右键单击Project树中的src,选择New | C / C ++源文件 并将其命名为my_package.cpp。
将整个talker.cpp文件从Publisher和Subscriber教程复制到my_package.cpp中。
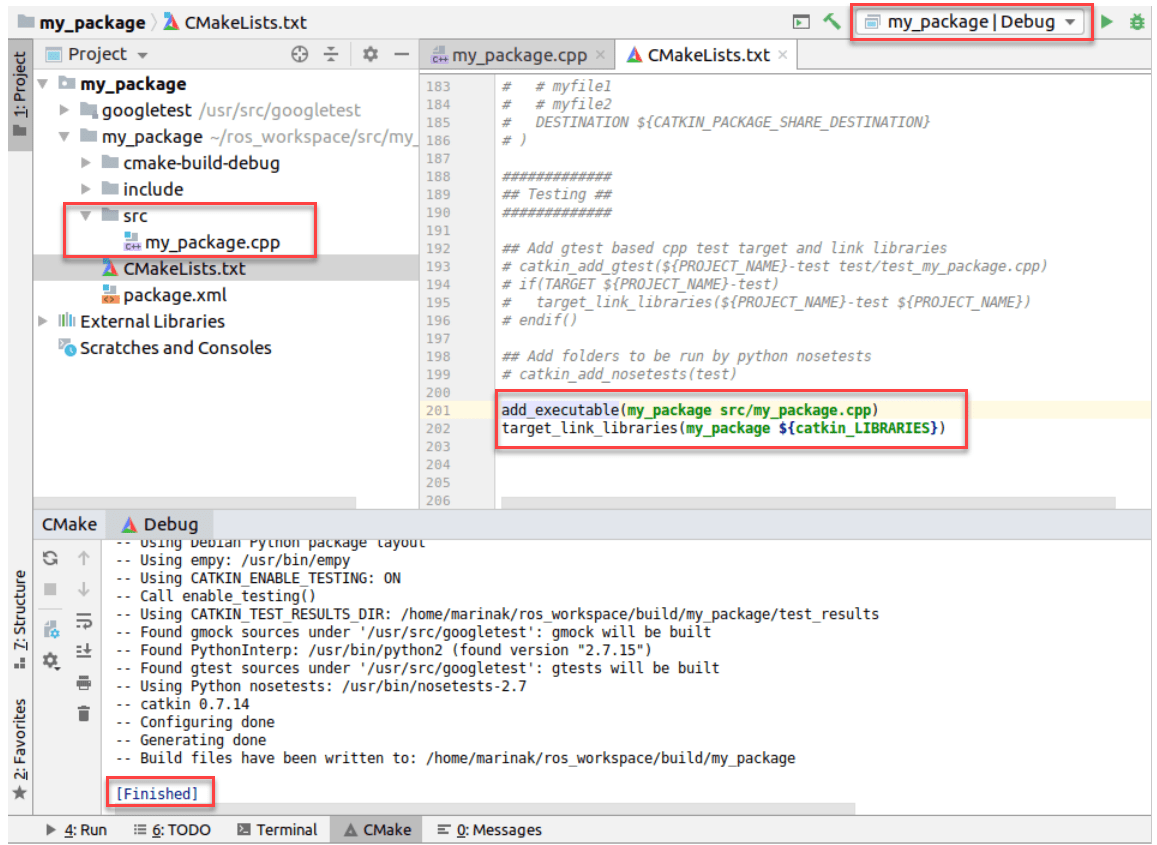
新创建的源添加到的CMakeLists.txt和链接其对应程序库:
add_executable(my_package src/my_package.cpp)
target_link_libraries(my_package ${catkin_LIBRARIES})
之后,重新加载CMake项目,并注意运行/调试配置列表中的my_package:
运行ROS节点
1、在从CLion运行节点之前,在新终端中打开ROS主站:
roscore
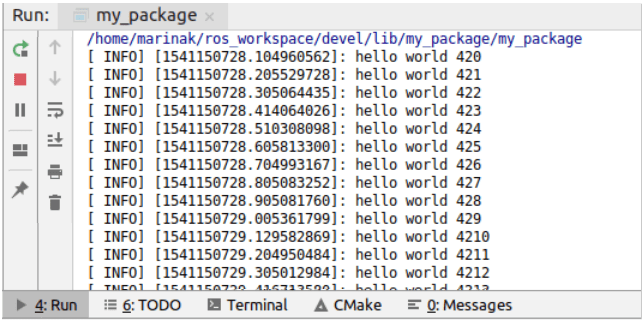
2、在CLion,运行 的my_package配置。 运行工具窗口将显示节点输出:
的my_package配置。 运行工具窗口将显示节点输出:
3、在单独的终端中,检查当前活动的ROS主题。如果我们打印消息chatter,输出将类似于我们在CLion中看到的内容:
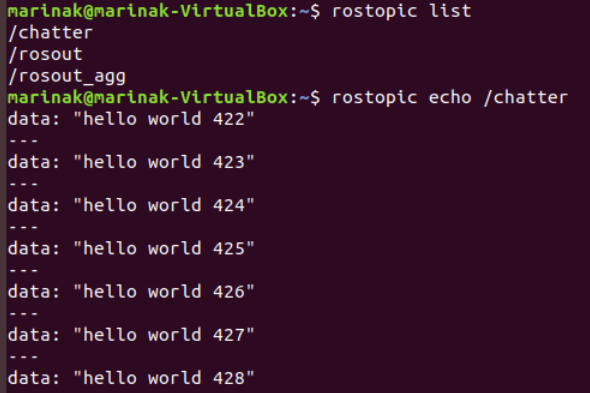
现在,如果我们 在CLion中停止应用程序,该 rostopic echo /chatter命令将没有输出。
在CLion中停止应用程序,该 rostopic echo /chatter命令将没有输出。