下载地址:https://github.com/TonyRobotics/RoboWare/tree/master/Studio
1、创建工作区

2、创建ROS包
src右键新建ros包
在ros包上右键可以新建ros包下的src文件夹
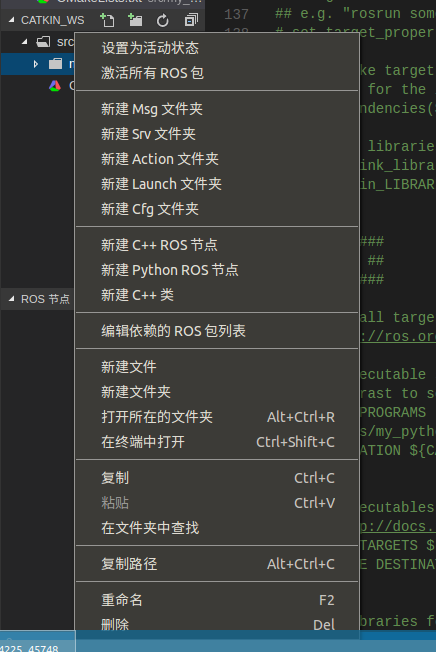
右键ROS包下的src选择"新建CPP源文件" 输入文件名后,按回车键,会弹出列表,选择加入新的可执行文件,会穿件一个节点。
3、添加并启动Launch文件
右键包名文件夹,新建Launch文件夹,新建Launch文件
右键Launch文件可选择运行Launch文件。