在 MDP 中,我们给出了 model(即转移 T 和奖励 R 的具体形式),然而,这种情况显然是理想的,要解决现实中的问题,我们一般不能得到 model,因此,就进入到了这个专题——强化学习 RL。
和 MDP 中的概念类似,这里有状态集 S,动作集 A,对于我们的每个 ((s,a)) 环境会给出一个回报 r ,并转移到新的状态 (s'),注意,我们并不知道 R 和 T 的具体形式,只能获得这一系列的 (s,a,r,s') 序列,基于此,我们要训练出决策 (pi(s))。
Model-based RL
在 model-baesd 中,我们仍未放弃模型,相较于 MDP,我们通过数据训练出一个估计的模型,并利用这个模型使用 MDP 的方法来学习,例如 value iteration, policy iteration 等。
具体来说,我们的观测是一系列的 episode,即从一个初始状态出发,经过一些动作,最终到达了一个终止状态,这一幕就结束了。

基于这些 episodes,我们可以用极大似然的方法近似估计 Transition model, Reward model,再用 MDP 方法求解。
Model-free RL
而在 model-free 中,我们则改用了另一种策略——事实上,在 model-based 中,我们重新通过模型来进行学习,可以说是浪费了序列的一些信息;另一方面,这种方法可能需要大量的观测,对于数据的要求较高。
教材和讲课的方式是按照 passive, active 的区分来讲的,passive 的意思是说,我们固定了一个策略,在这个策略下生成观测,最终计算出结果;而在 active 中,我们不固定策略,而是在搜索过程中不断调整更新,目的是为了找到最优的策略。参照 MDP 里面的内容,可以认为 active 是一个完整的求解问题的过程,而在 passive,我们仅做了在 policy iteration 中固定策略,更新值的操作。
Passive RL
当然,两者还有有一定的区别的,从课程内容来看,在 passive 中,我们更多使用的是 V,而在 active 中我们一般使用 Q 值迭代。具体来说,有 MC 和 TD 两种 passive 算法。
MC:即 Direct evaulation
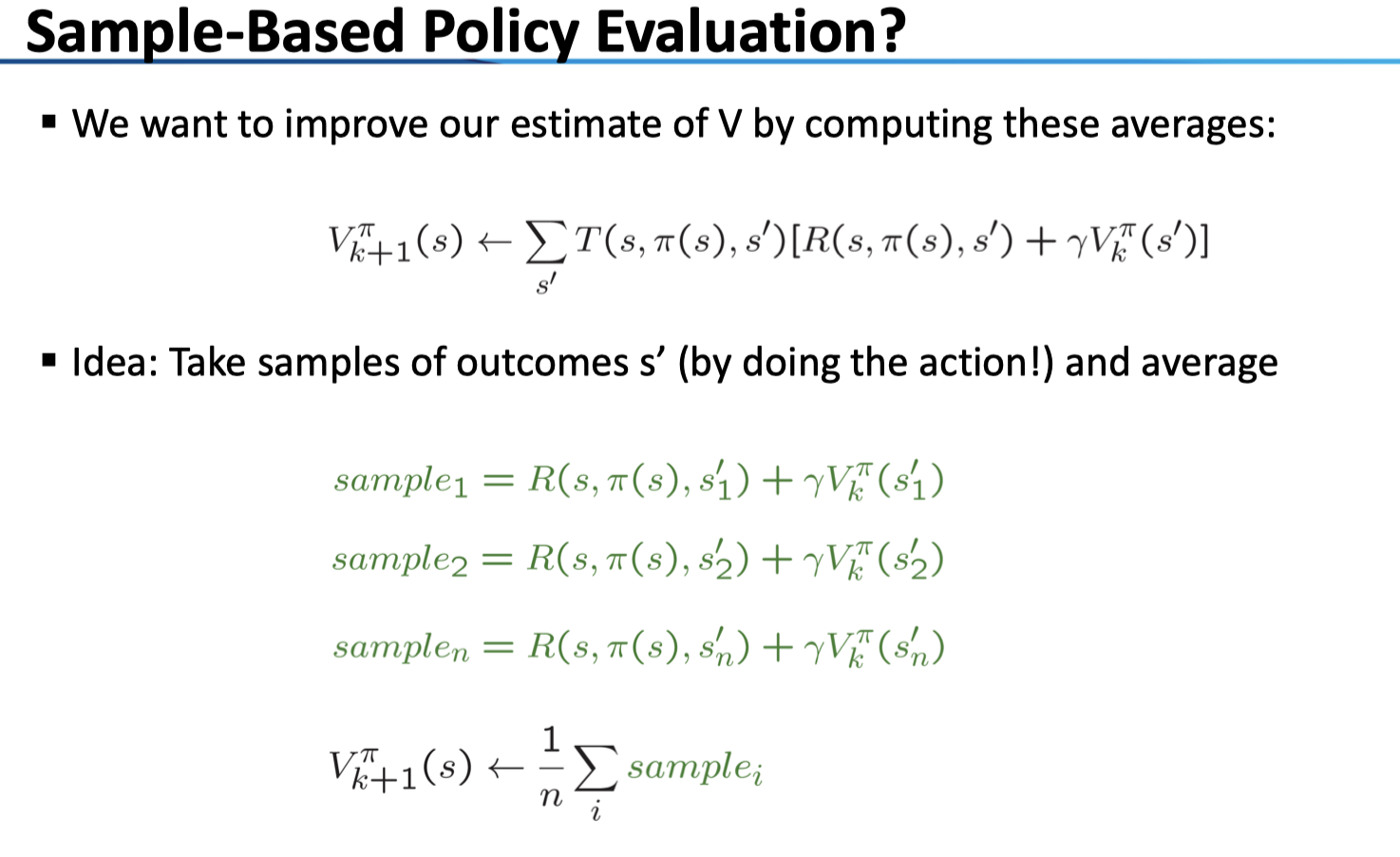
在这里,我们对于每一个 episode 中的 state,以衰减因子(gamma) 计算其期望的 reward(直到 episode 结束)具体计算的时候,上述的求期望即求和平均(对于一个 episode 中出现多次的状态来说,可以只使用第一个出现的,也可以重复使用)。
或者说,我们通过每一个出现的样本值更新了 policy value(我们的样本生成所采用的 policy)
(我们在这里给出了一个等价的表述,但事实上计算的时候不是照此计算的,这里适合后面的 TD 统一起来。)这里计算了在给定一个固定的 policy 下的价值迭代,我们可以根据得到的结果更新策略生成数据,再次进行上述 MC。下面给出了这种「policy evaluation」的思想。
这是一个比较直观的想法,最终的结果是对于每一个状态得到了期望的值。然而,问题在于:1. states are learned separately, 2. waste information about state connections.
比较在有 model 下的公式,对上述问题可理解
那么,我们如何在 model-free 下利用到 model 的信息呢?
Temporal Difference TD Learning:
对于后项来说,我们计算得新的 value,减去原来的 value 得到 difference,再以学习率 (alpha) 更新原来的 V。注意这里的学习率可以使上面的随着 N 递减的函数,也可以是一个 fixed 的函数。
最后,来比较一个这两种方式:对于一个长度为 L 的 episode 来说,两者的时间复杂度都是 (O(L))。而对于 TD 来说,它利用了 Markov 的结构;对于 MC 来说,它必须等到整个 episode 结束之后才能进行学习,而 TD 则随着 episode 的延伸进行学习,因此是 online 的。
Active RL
在主动学习中,我们需要学习策略,也正因于此上述对于 V 进行学习的方法就比较低效了,所以我们一般使用 Q-Learing 。回忆在 MDP 中我们基于模型的公式:
在 model-free 中我们可基于 TD 采用以下公式迭代:
可以看到,和在 passive 下的 TD value 迭代(1)思想上是一致的:都是基于生成一个 sample 以学习率 (alpha) 进行学习。不同之处在于,之前我们对于值直接进行操作不会涉及到策略的选择问题,而在 Q-Learning 中,我们要用 (s') 的值来更新 Q-state=(s,a) ,我们很自然得进行了取 max 操作。
我们可以对所有 Q 状态初始化为 0,接着开始迭代,然而这样会出现一个问题:一旦 agent 找到了一条路径,祂会始终选择这条路径进行决策,从而生成的 episode 失去了一定的随机性——也就是说,我们陷入了局部最优。
Exploration v.s. Exploitation
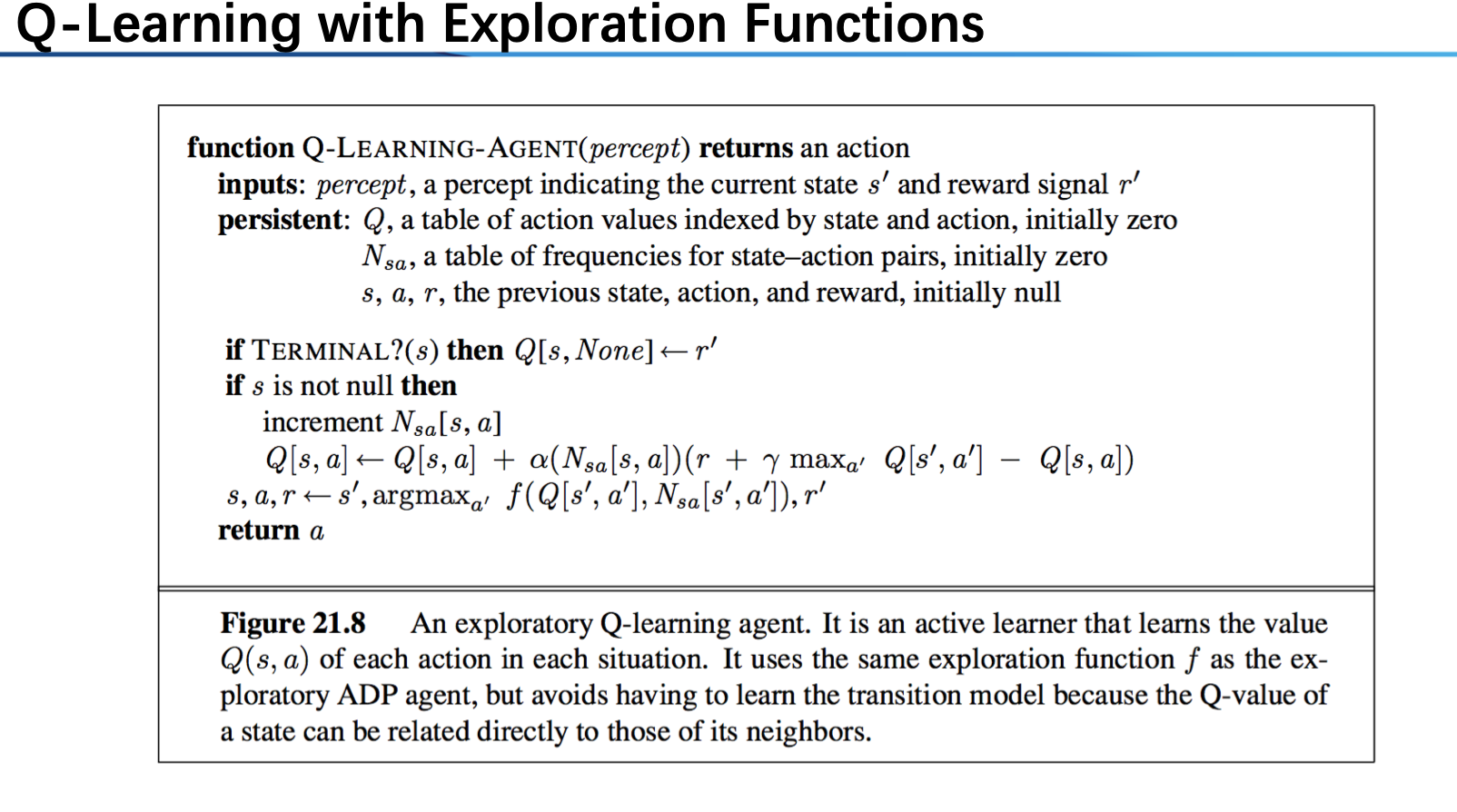
也就是说,我们除了 expoit 原有的信息,也要保证一定的 exploration。为此,可以的策略有多种:例如:1. 每次行动除了按照 policy extraction 的结果之外以一定的概率随机行动((epsilon-greedy) ,随机概率随时间减小);2. 我们不是基于 Q 值 extract 而是使用函数 f 形成策略,如 (f(u,n)=u+{kover n}) ,其中的 u 是我们的 Q 值而 n 为这一策略的次数,直观来解释,我们倾向于采取次数较少(或全新)的 action。
Approximate Q-Learning
有时候,我们并不需要用 state 来描述整个状态空间(Pacman 的例子,1. 状态空间过大;2. 很多状态相似),我们可以提取几个 feature 来 represent 这个状态。——一种降维的思想。
注意到,我们对于每一个 sample,用它来更新了各特征的 weight;直观来看,若一个 policy 不够好,那么 difference 可能是负数,那么在这种情况下我们就会把在这里表现较为突出的 feature((f_i(s,a)) 较大)的权重 (w_i) 进行缩减。