一.MDP / NFA :马尔可夫模型和不确定型有限状态机的不同
状态自动机:https://www.cnblogs.com/AndyEvans/p/10240790.html
MDP和NFA唯一相似的地方就是它们都有状态转移,抛掉这一点两者就八竿子打不着了。
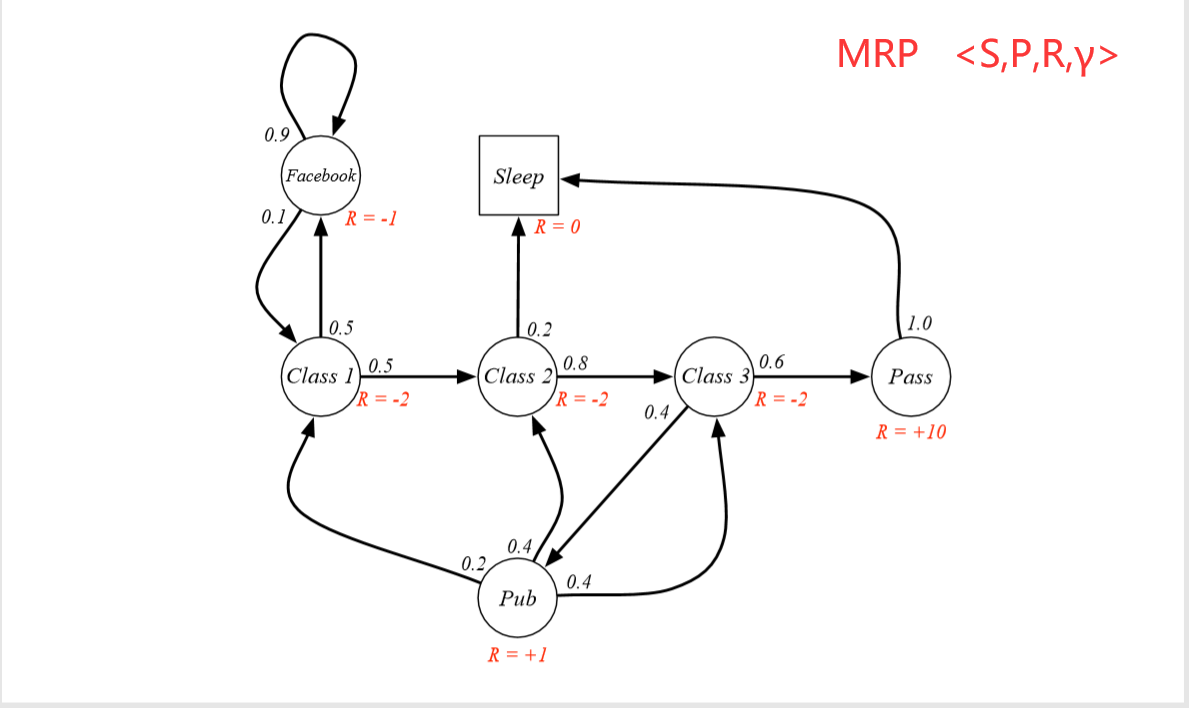
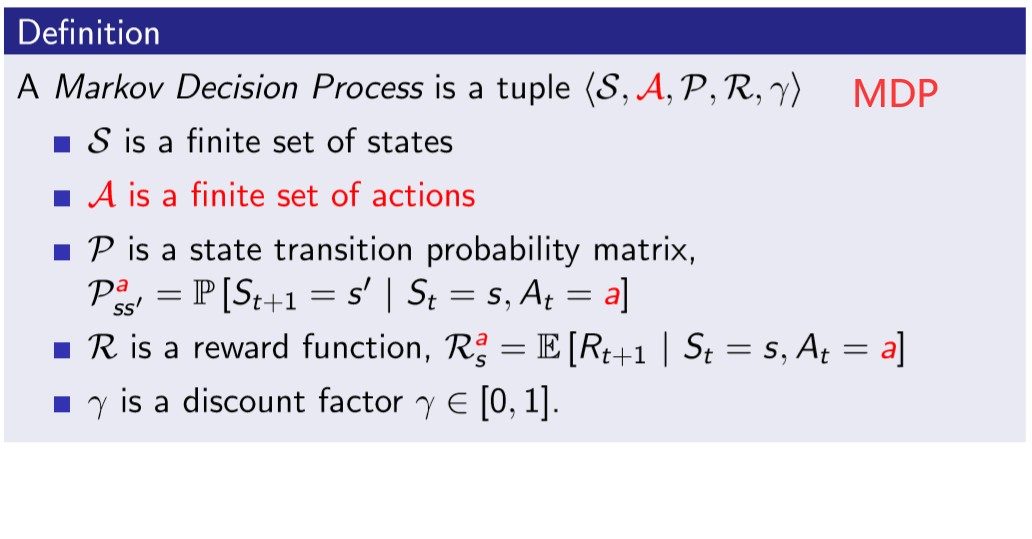
二.MP -> MRP -> MDP

三.计算给定策略下的价值函数 / 贝尔曼期望方程
我们用贝尔曼期望方程求解在某个给定策略π和环境ENV下的价值函数:
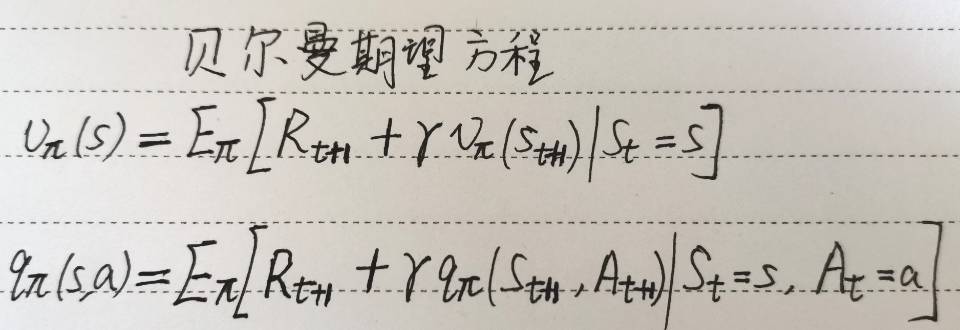
具体解法是:(下面是对于V(s)的解法)

从而对于每一个特定的π,都能得到其对应的价值函数。所以我们可以有一组的{ (π1,value_function_of_π1) ,(π2,value_function_of_π2) ...... }
但是我们解决问题的目标是拿到最优的那组,其他的扔掉,解决方法就是使用贝尔曼最优方程确定最优价值函数。
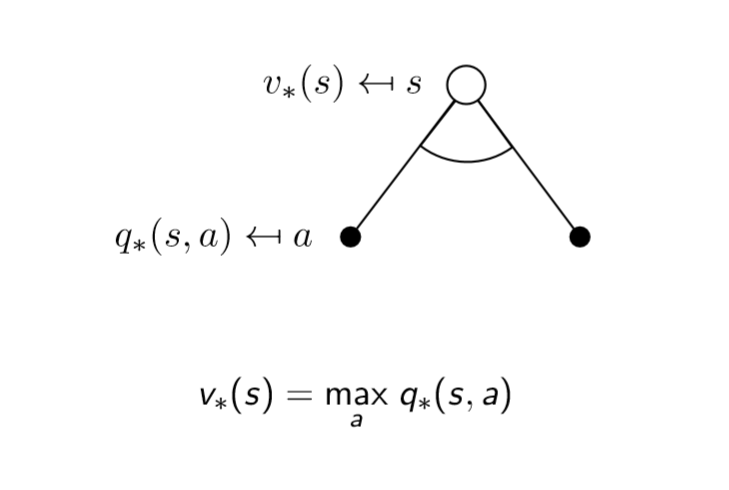
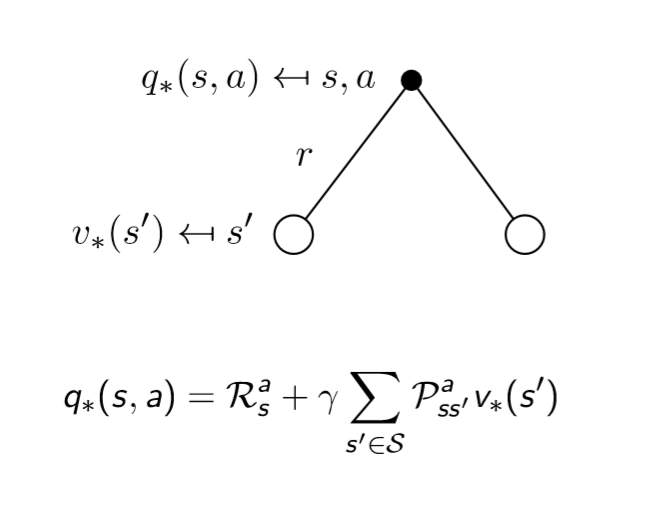
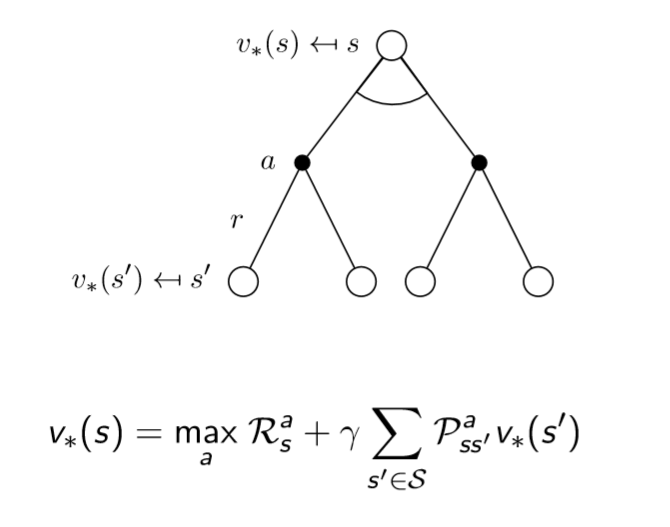
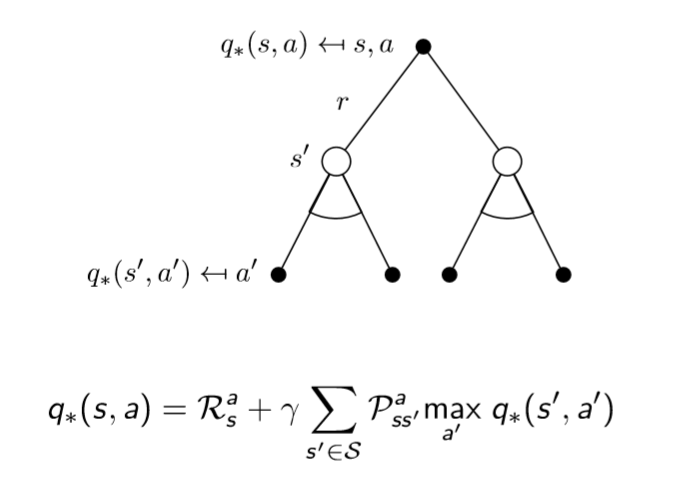
四. 确定最优价值函数 /贝尔曼最优方程
我们的“最优价值函数”和“最优策略”是如下定义的,找最优价值函数的过程也就是找最优策略的过程
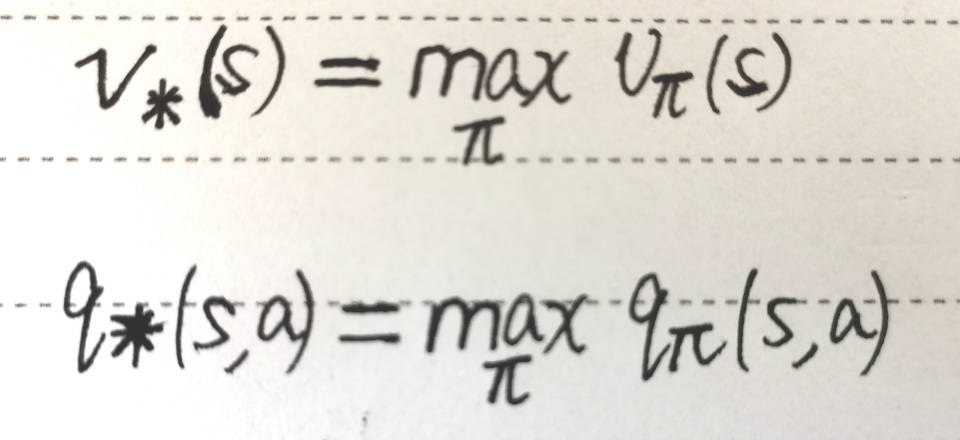
最优价值函数 ==== 一个MDP中的可能的最好的表现
解决一个MDP ==== 确定唯一的最优价值函数
传统的强化学习算法就是找定“最优价值”&“最优策略”的算法,好比SVM是要找定“最大间隔超平面”(“传统”和“现代”相区分,“现代”强化学习算法都是使用神经网络将其不确定化,转化为一个回归问题,训练模型参数,抛弃了“传统”方法的数学硬推)。
贝尔曼最优方程是非线性的,没有一个固定解法。所以,你就知道这是最原始的强化学习问题就好了,没有人会用这个硬推来解决强化学习问题的。
比它稍微高级一点儿,我们采用迭代法来求解最优价值最优策略:
——Value iteration
——Policy iteration
——Q-learning
——Sarsa
——Sarsa(lamda)
五.无限MDP和连续MDP
转换为离散MDP即可。
六.POMDP

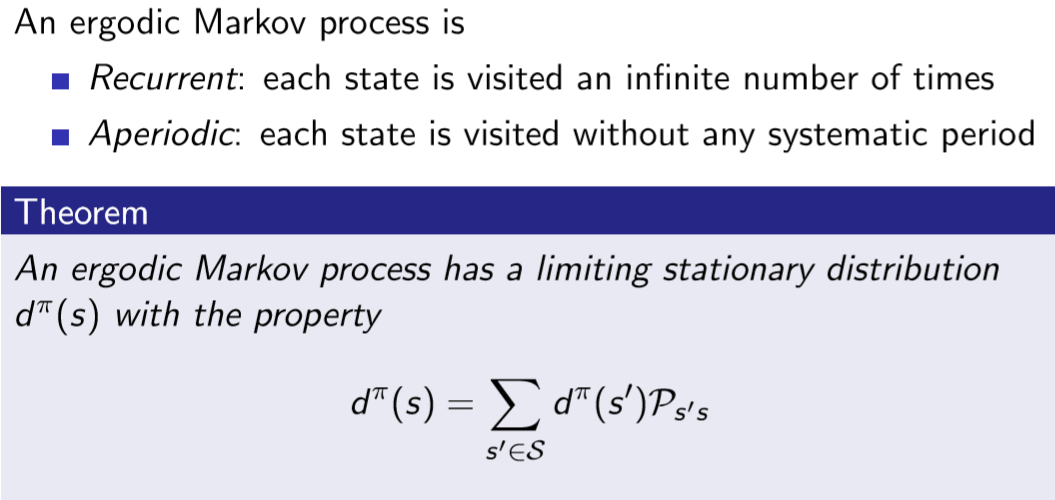
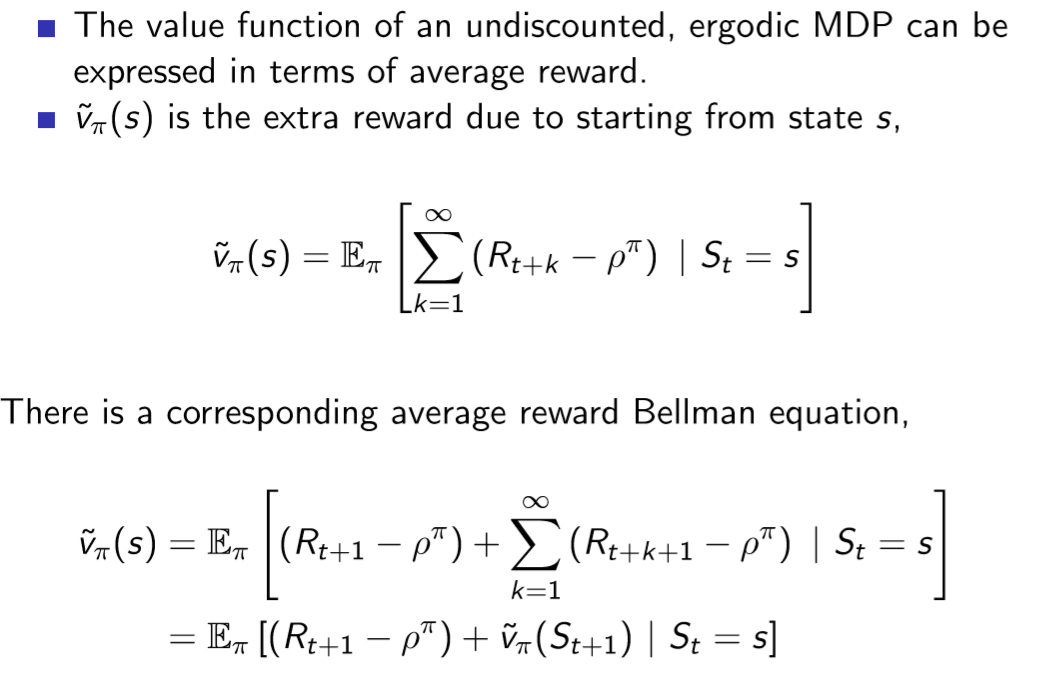
七.Undiscounted average reward MDP