可以参考下面的这个链接,讲的非常清楚啦,一共五篇
http://blog.csdn.net/gj19890923/article/details/50407782
下面是转载的。
在Icehouse中, rpc消息队列相关处理从openstack.common.rpc慢慢的都转移到oslo.messaging上, 现在仅有几个项目没有转移, 将来也会转, 这个架构更合理, 代码结构清晰, 且弱耦合.
本文章主要针对rpc, notify基本没涉及, 有时间总结总结.
基本概念
- Server: 为各个Client提供RPC接口,它是消息的最终处理者;
- Client: RPC接口的调用端, 我们常见的cast和call方法就是在这端调用;
- Exchange: 理解为一个消息交换机, 把消息分类,告诉何种路由到何种queue;
- Topic: 是一个RPC消息的唯一标识; servers监听这个topic的消息; client负责发出这个topic的消息;
- Namespace: servers可以在一个topic上,提供多种方法集合, 这些方法集合通过namespace来分开管理;
- Method: 这个慨念很简单, 就是函数, 即远程方法调用中的方法;
- API version: 也就是server上提供的RPC api接口集合的版本号,openstack中1.0起步, servers可以一次提供多种api version,client每次请求时只需描述它所需要的最低version就ok;
- Transport: 可以理解为传输载体,这个很好理解, 就是我们使用的消息队列中间件RabbitMQ, Qpid, ZeroMQ等等, 是负责整个消息处理的系统, 它负责消息传输直到提供给clients返回, 使用此系统者, 不用了解细节, Openstack中实现的主要有这三种, AMQP标准下的rabbitMQ和Qpid, 和非AMQP的ZeroMQ, ZeroMQ更底层, 速度更快, 据说快10倍。
- Target这是个很重要的概念, 它描述了信息的处理方式, 该发哪里去(server属性)和消息处理端(server)监听什么信息(topic 属性)。以下是Target的属性
exchange (defaults to CONF.control_exchange)
topic
server (optional) 它会使server的标示, 如host or host@backend 等等
fanout (defaults to False) 这种模式类似于广播, 符合条件的server都要监听并做处理
namespace (optional)
API version (optional)
Use Cases [OpenStack中使用场景]
1.存在多个接口版本的server, 随机选择一个处理远程调用的方法
比如我们有多个接口版本的servers在监听某个exchange上某个topic的方法调用, 一旦方法调用, 就会随机选择一个版本的server来监听。
- nova-api 调用'nova' exchange上 topic为'scheduler' 的'run_instance'方法, 然后,会有一个‘nova-scheduler’服务捕获请求
2.存在多个接口版本的server, 特定server处理远程调用的方法
比如我们有多种接口版本的servers在监听某个exchange上某个topic的方法调用, 不同于之前的是, 它要求选择一个特定版本的server来监听。
- nova-scheduler 选择 'foobar' host去运行一个instance,那么就调用'nova' exchange上 topic为'scheduler' 的'run_instance'方法, 它同时指定要在“foobar”这个server上run
3.存在多个接口版本的server, 每个server都要处理远程调用的方法, 即所谓的fanout
比如我们有多种接口版本的servers在监听某个exchange上某个topic的方法调用, 不同于之前的是, 它要求每个server都要监听并运行这个方法。
- nova-compute 周期性的在faout模式调用 'update_service_capabilities' 方法, topic为 'scheduler',exchange为'nova' , 这样每个nova-scheduler 服务都要捕获并处理它
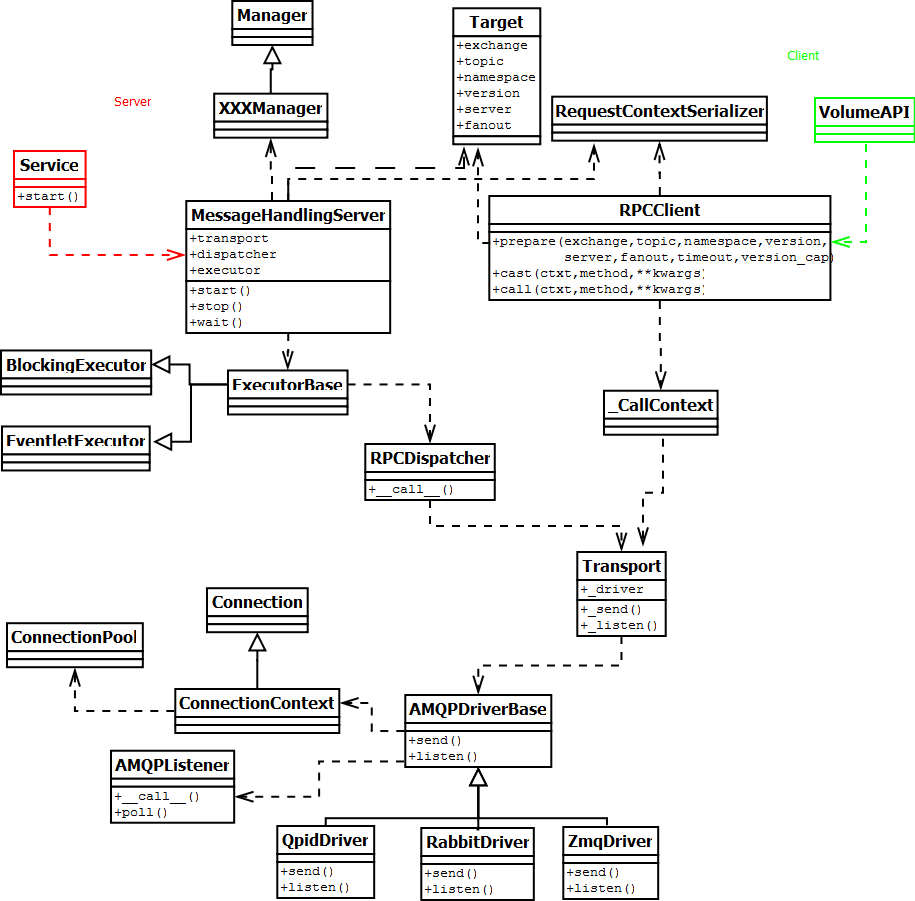
对象关系图
Server端:消息队列的监听会在service启动的时候开启, 比如cinder-volume启动时,会启动MessageHandlingServer( 下面具体介绍),来监听消息并把消息dispatch到距离的Manager方法中做消息处理.
Client端: 负责消息发出,方法调用的code是在具体API中,如本例的VolumeAPI, 一般存放在rpcapi.py中.
为了进行详细解释,先画出整体的对象依赖图:
消息处理端 [Server端]
MessageHandlingServer
这个就是server端,是消息的最终处理者。
Server端的实现有个两个重要的内部概念:dispatchers 和executors, dispatcher专注在消息的加载并调度到合适的方法。 executor是专注在怎样从transport中获得消息并把它分配给dispatcher的策略,是重开一个线程还是在现有线程上继续处理。实现dispatchers可以为rpc或者notification, executors可以为block或者eventlet
transport:消息中间件,rabbitMQ or Qpid or ZeroMQ
dispatcher:rpc或者notification
executor:block或者eventlet,默认block, 它描述的是I/O策略,是重开一个线程(EventletExecutor类实现)还是在现有线程上继续处理(BlockingExecutor实现)。
MessageHandlingServer的start()方法开始后 , 就会一直获取消息队列中信息,并把消息分配给dispatcher, 直到stop()方法被调用。
RPCDispatcher
RPC消息调度器
MessageHandlingServer就依赖它完成从消息到具体处理消息的方法的调度。
它主要干了 两件事
1) 它利用Transport类(Transport又利用AMQPDriverBase的listen()) 获得监听器, 并报告给Executor
- def listen(self, target):
- conn = self._get_connection(pooled=False)
- listener = AMQPListener(self, conn)
- conn.declare_topic_consumer(target.topic, listener)
- conn.declare_topic_consumer('%s.%s' % (target.topic, target.server),
- listener)
- conn.declare_fanout_consumer(target.topic, listener)
- return listener
2) 把监听器poll出来的消息通过这个dispatcher传到XXXManager中的具体处理方法上
关于connectionpool不详细介绍了,它是与具体Transport的连接池。
消息发出端[Client端]
主要都写在rpcapi.py 中, 本文以Cinder项目为例,讲述delete_volume消息发出的过程。
- class VolumeAPI(object):
- BASE_RPC_API_VERSION = '1.0'
- def __init__(self, topic=None):
- super(VolumeAPI, self).__init__()
- target = messaging.Target(topic=CONF.volume_topic,
- version=self.BASE_RPC_API_VERSION)
- self.client = rpc.get_client(target, '1.15')
- ....
- def delete_volume(self, ctxt, volume, unmanage_only=False):
- cctxt = self.client.prepare(server=volume['host'], version='1.15')
- cctxt.cast(ctxt, 'delete_volume',
- volume_id=volume['id'],
- unmanage_only=unmanage_only)
RPCClient
负责通过消息队列发消息到消息队列中,两种方法调用的方式:cast & call。关于这两种方法也将会在另一遍博文(介绍amqp的publisher/consumer机制)中来介绍
会利用Transport的send方法。