FreeRTOS 软件定时器
实验
创建2个任务,start_task、timercontrol_task。
start_stask:创建timercontrol_task任务;创建周期定时器AutoReloadTimer 和单次定时器OneShotTimer;创建二值信号量BinarySemaphore。
BinarySemaphore:接收串口命名,在中断中释放信号,在timercontrol_task中等待信号量,解析命名,通过不同的命令控制周期定时器AutoReloadTimer和单次定时器OneShotTimer的开启和关闭。
AutoReloadTimer 的回调函数会输出运行的次数
OneShotTimer的回电函数会输出运行的次数
任务分配:
//任务优先级 #define START_TASK_PRIO 1 //任务堆栈大小 #define START_STK_SIZE 128 //任务句柄 TaskHandle_t StartTask_Handler; //任务函数 void start_task(void *pvParameters); //任务优先级 #define TIMERCONTROL_TASK_PRIO 2 //任务堆栈大小 #define TIMERCONTROL_STK_SIZE 50 //任务句柄 TaskHandle_t TimerControlTask_Handler; //任务函数 void timercontrol_task(void *pvParameters); SemaphoreHandle_t BinarySemaphore_Handle; // 二值信号量句柄 TimerHandle_t AutoReloadTimer_Handle ; // 周期定时器句柄 TimerHandle_t OneShotTimer_Handle; // 单次定时器句柄 void AutoReloadTimerCallback(void); // 周期定时器回调函数 void OneShotTimerCallback(void); // 周期定时器回调函数
main() 函数
int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4 delay_init(); //延时函数初始化 uart_init(115200); //初始化串口 LED_Init(); //初始化LED //创建开始任务 xTaskCreate((TaskFunction_t )start_task, //任务函数 (const char* )"start_task", //任务名称 (uint16_t )START_STK_SIZE, //任务堆栈大小 (void* )NULL, //传递给任务函数的参数 (UBaseType_t )START_TASK_PRIO, //任务优先级 (TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度 }
命令解析相关函数:
// 将字符串中的小写字母转换为大写 // str:要转换的字符串 // len:字符串长度 void LowerToCap(u8 *str,u8 len) { u8 i; for(i=0;i<len;i++) { if((96<str[i])&&(str[i]<123)) // 小写字母 str[i] = str[i]-32; // 转换为大写 } } // 命令处理函数,将字符串命令转换成命令值 // str:命令 // 返回值:0xFF-命令错误 其他值-命令值 u8 CommandProcess(u8 *str) { u8 CommandValue = 0xFF; if(strcmp((char*)str,"KEY1")==0) CommandValue = 1; else if(strcmp((char*)str,"KEY2")==0) CommandValue = 2; else if(strcmp((char*)str,"KEY3")==0) CommandValue = 3; else if(strcmp((char*)str,"KEY4")==0) CommandValue = 4; return CommandValue; }
任务函数:
//开始任务任务函数 void start_task(void *pvParameters) { taskENTER_CRITICAL(); //进入临界区 // 创建二值信号量 BinarySemaphore_Handle = xSemaphoreCreateBinary(); // 创建二值信号量 if(BinarySemaphore_Handle ==NULL) { printf("BinarySemaphore Create Failed! "); }else{ xSemaphoreGive(BinarySemaphore_Handle); // 释放信号量 } // 创建周期定时器 AutoReloadTimer_Handle = xTimerCreate( (const char *)"AutoReloadTimer", (TickType_t) 1000, (UBaseType_t) pdTRUE, (void *) 1, (TimerCallbackFunction_t)AutoReloadTimerCallback ); if(AutoReloadTimer_Handle == NULL) { printf("AutoReloadTimer Created Failed "); }else{ printf("AutoReloadTimer Created Success "); } // 创建单次定时器 OneShotTimer_Handle = xTimerCreate( (const char *)"OneShotTimer", (TickType_t) 2000, (UBaseType_t) pdFALSE, (void *) 2, (TimerCallbackFunction_t)OneShotTimerCallback ); if(OneShotTimer_Handle == NULL) { printf("OneShotTimer Created Failed "); }else{ printf("OneShotTimer Created Success "); } //创建TIMECONTRFOL任务 xTaskCreate((TaskFunction_t )timercontrol_task, (const char* )"timercontrol_task", (uint16_t )TIMERCONTROL_STK_SIZE, (void* )NULL, (UBaseType_t )TIMERCONTROL_TASK_PRIO, (TaskHandle_t* )&TimerControlTask_Handler); vTaskDelete(StartTask_Handler); //删除开始任务 taskEXIT_CRITICAL(); //退出临界区 } //TIMERCONTROL任务函数 void timercontrol_task(void *pvParameters) { u8 len = 0; u8 CommandValue = 0xFF; u8 CommandStr[USART_REC_LEN]; BaseType_t err; while(1) { xSemaphoreTake( BinarySemaphore_Handle, portMAX_DELAY ); // 死等 len = USART_RX_STA&0x3fff; // 得到此次接收到的数据长度 sprintf((char *)CommandStr,"%s",USART_RX_BUF); // 装载数据 CommandStr[len] = '�'; // 加上字符串结尾符号 LowerToCap(CommandStr,len); // 将字符串转换为大写 CommandValue = CommandProcess(CommandStr); // 命令解析 if(CommandValue != 0xFF) // 接收到正确的命令 { switch(CommandValue) { case 1: // 开启周期定时器 err = xTimerStart( AutoReloadTimer_Handle, 0 ); if(err == pdFAIL) { printf("AutoReloadTimer Start Failed! "); }else{ printf("AutoReloadTimer Start Succeed! "); } break; case 2: // 关闭周期定时器 err = xTimerStop( AutoReloadTimer_Handle, 0 ); if(err == pdFAIL) { printf("AutoReloadTimer Stop Failed! "); }else{ printf("AutoReloadTimer Stop Succeed! "); } break; case 3: // 开启单次定时器 err = xTimerStart( OneShotTimer_Handle, 0 ); if(err == pdFAIL) { printf("OneShotTimer Start Failed! "); }else{ printf("OneShotTimer Start Succeed! "); } break; case 4: // 关闭周期定时器 err = xTimerStop( OneShotTimer_Handle, 0 ); if(err == pdFAIL) { printf("OneShotTimer Stop Failed! "); }else{ printf("OneShotTimer Stop Succeed! "); } break; } }else{ printf("Cmd error! "); } USART_RX_STA = 0; } }
定时器回调函数:
// 周期定时器回调函数 void AutoReloadTimerCallback(void) { static u8 count = 0; count ++; printf("AutoReloadTimerCallback running %d timers ",count); } // 周期定时器回调函数 void OneShotTimerCallback(void) { static u8 count = 0; count ++; printf("OneShotTimerCallback running %d timers ",count); }
串口中断初始化和中断处理函数
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节. //接收状态 //bit15, 接收完成标志 //bit14, 接收到0x0d //bit13~0, 接收到的有效字节数目 u16 USART_RX_STA=0; //接收状态标记 void uart_init(u32 bound){ //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 //USART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9 //USART1_RX GPIOA.10初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=8 ;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //USART 初始化设置 USART_InitStructure.USART_BaudRate = bound;//串口波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(USART1, ENABLE); //使能串口1 } extern SemaphoreHandle_t BinarySemaphore_Handle; // 二值信号量句柄 void USART1_IRQHandler(void) //串口1中断服务程序 { u8 Res; BaseType_t xHigherPriorityTaskWoken = pdFALSE; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) { Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART_RX_STA&0x8000)==0)//接收未完成 { if(USART_RX_STA&0x4000)//接收到了0x0d { if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始 else USART_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(Res==0x0d)USART_RX_STA|=0x4000; else { USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ; USART_RX_STA++; if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 } } } } if((BinarySemaphore_Handle != NULL) && (USART_RX_STA&0x8000)) { xSemaphoreGiveFromISR( BinarySemaphore_Handle, &xHigherPriorityTaskWoken ); // 释放互斥信号量 portYIELD_FROM_ISR(xHigherPriorityTaskWoken); // 如果需要进行一次任务切换 } }
#define USART_REC_LEN 20 //定义最大接收字节数 200 #define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收 extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
注意:串口中断的优先级在FreeRTOS的优先级管理范围内。
运行结果:
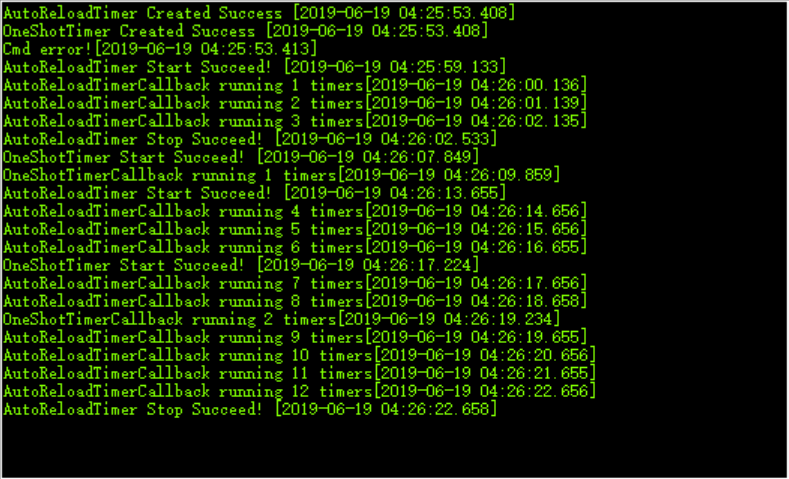
输入KEY1命令,周期定时器开始运行,周期性调用其回调函数,直到输入KEY2命令,停止周期定时器,其回调函数不再被调用。
输入KYE3命令,单次定时器开始运行,调用其回调函数,只调用一次,就不再调用。再次输入KEY3命令,还是只调其回调函数一次。
可以看出,停止单次定时器命令KEY4,可以不存在。